







ממסר מצב מוצק (Solid State Relays – ) וקונטקטור מצב מוצק (Solid State Contactors – SSC) מתאימים בצורה אידיאלית לשליטה בעומסים דינמיים, כגון במנועים, במיוחד כאשר היישום מצריך מעגלים תכופים או מרובים של הפעלה/כיבוי. בחירה נכונה של ממסר מצב מוצק ושל קונטקטור מצב מוצק, כדי להפעיל ולכבות מנוע באופן מהימן ביישום נתון, מצריכה הבנה של הדרישות המוטלות על בקר המצב המוצק על ידי המנוע והיישום.
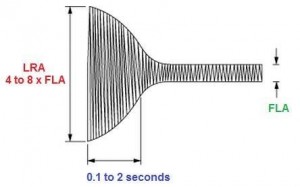
תרשים 1.
דירוגים של בקרת מנוע בכוח סוס (HP) או בקילוואט (KW), הזמינים בממסרים ובקונטקטורים של מצב מוצק רבים, מבטלים את הצורך לנחש ומפשטים מאוד את תהליך הבחירה, אך ניתן להשתמש גם בממסרי מצב מוצק עם דירוג לשימוש כללי (General Purpose Ratings) בלבד כדי לשלוט במנוע. מסמך זה דן בתהליך שיש לבצע כדי לבחור ממסר מצב מוצק נכון לשליטה במנוע במצבים שבהם דירוגי כוח סוס (HP) או קילוואט (KW) של ממסר המצב המוצק אינם ידועים או אינם זמינים.
זרם עומס מלא (FLA) וזרם רוטור נעול (LRA)
במקרים שבהם אין דירוג HP זמין עבור ממסרי מצב מוצק, מלבד התאמה נכונה של מתחי ההפעלה והבקרה ליישום, הפרמטר החשוב ביותר הבא שיש לשקול הוא זרם ההתנעה הראשוני (initial inrush current) של המנוע במהלך ההפעלה. הפעלת המנוע ממצב עומד גורמת לזרם ראשוני (או זרם התנעה) גבוה, שמוזן למנוע כדי להתגבר על מסת האינרציה המשולבת של מערכת המנוע/עומס. מסת אינרציה גדולה יותר (של מנוע/עומס) תגרום לזרמי התנעה גבוהים יותר ולמשך זמן ארוך יותר. זרם עומס מגיע לערך הגבוה ביותר שלו מיד עם ההפעלה, כאשר המנוע מתחיל ממצב כבוי, והוא מוגבל רק על ידי ערך ההתנגדות של המנוע. זהו מצב מעבר שעשוי להימשך כמה מחזורים או כמה שניות, בהתאם לאופי העומס המכני והיישום (סיבוב). הזרם הראשוני למעשה שווה לזרם שמוזן למנוע, אם הרוטור שלו (הציר) היה “ננעל” ולא היה יכול להסתובב, ולכן הוא בדרך כלל ידוע כזרם רוטור נעול, או LRA.
כאשר המנוע מגביר את מהירות הסיבוב עד לרמה התפעולית שלו, הזרם יורד עד לערך שמתאים לכוח הסוס שנמסר לעומס. ערך הזרם הגבוה ביותר במצב זה הוא זרם העומס המלא של המנוע, או FLA. ראו תרשים 1. הקשר בין זרם עומס מלא (FLA) לזרם רוטור נעול (LRA) משתנה ממנוע למנוע, אבל בדרך כלל נמצא בטווח ידוע. כתוצאה מכך, ברגע שאנו יודעים מהו הזרם במצב היציב (כלומר FLA) של מנוע מסוים, אנו יכולים לקחת בחשבון שזרם ההתנעה (או LRA) יכול להיות כפול 4, 5 … 8 מערך ה-FLA. אף שה-LRA נמשך זמן קצר בלבד (החל מכמה מאות אלפיות השנייה עד 2 שניות או יותר), ה-SSR שנבחר צריך לעמוד בערכים אלה באופן חוזר ונשנה, על פי תדירות ההפעלה/כיבוי הנדרשת ביישום.
לממסר מצב מוצק ולקונטקטור מצב מוצק אין מנגנון מתבלה. לכן, אם הם נבחרו כראוי על בסיס קריטריונים אלה, תהיה להם תוחלת חיים ארוכה יותר באופן משמעותי (>25 שנים ברוב המקרים) מאשר ממסרים או קונטקטורים מכאניים בעלי דירוג דומה.

טבלה 1. הקשרים בין HP/KW ל-FLA, פאזות ומתח עומס
בחירת ממסר מצב מוצק / קונטקטור מצב מוצק בדירוג HP/KW
ממסר מצב מוצק וקונטקטור מצב מוצק שהוערכו על ידי לשכות בטיחות או גופים רגולטורים כ”בקרי מנוע”, כוללים דירוגי כוח מנוע ב- כוח סוס או ב-HP, דבר שהופך את תהליך בחירת הבקר עבור יישום מסוים להרבה יותר פשוט, מאחר שהדירוג של HP מתואם על ידי תקני UL או IEC הן בדירוגי FLA והן בדירוגי LRA. לכן, לעתים קרובות ממסר מצב מוצק וקונטקטור מצב מוצק מועדפים, היות שחישובי התיאום הנדרשים כבר נעשו ואומתו על ידי לשכות הבטיחות. יתרון חשוב לגבי פירוט של ממסר מצב מוצק או של קונטקטור מצב מוצק בדירוג בקר מנוע הוא שתהליך האישור של לשכות הבטיחות עבור היישום הסופי הרבה יותר פשוט, וכך העלויות הכרוכות באישורו של הבקר המוטורי, שעלולות להיות משמעותיות, נישאות על ידי הספק של בקר המצב המוצק.
בחירת ממסר מצב מוצק/קונטקטור מצב מוצק ללא דירוג HP/KW
כפי שצוין קודם לכן, גם כאשר ממסר מצב מוצק אינו נושא דירוג מוטורי של HPאו KW ניתן להשתמש בו ביישומי בקרת מנועים. צריך לקחת בחשבון את ערך הזרם הנומינלי של המנוע (FLA), את ערך זרם ההתנעה (LRA) ואת מקדם הספק של המנוע (בדרך כלל 0.1-0.9) כדי לבחור את סוג מתג ההפעלה המתאים – חציית נקודת האפס (zero-crossing) או אקראי (random) – והצורך האפשרי בהגנת מעבר SSR על מנת לבחור ממסר מצב מוצק מתאים.
כדי לסייע בתהליך בחירת ממסר מצב מוצק, טבלה 1 להלן מספקת שיטה פשוטה ודי מדויקת לתיאום בין דירוג HP/KW, דירוג זרם FLA, פאזות ומתח עומס. ערכי זרם העומס שבטבלה 1 הם ערכים אופייניים, המבוססים על ממוצע דירוגי מנוע במקרה הגרוע ביותר הנהוגים בתעשייה, בדירוגי יעילות מנוע בין 20% למנועים קטנים עד 60% למנועים גדולים יותר.
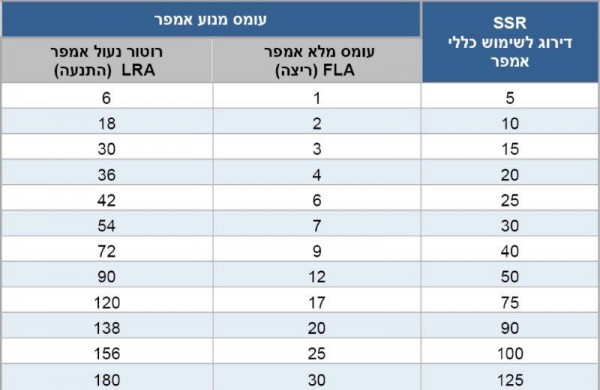
טבלה 2. דירוג לשימוש כללי לעומת FLA/LRA
כוח מנוע עומס מלא –
אמפר (FLA)
שימו לב שהערכים של זרם עומס בטבלה הם זרם FLA של המנוע, ואינם כוללים זרמי התנעה (LRA). עם זאת, כפי שהוזכר קודם לכן במאמר, FLA ו-LRA מתואמים עם הדירוגים של HP על פי התקנים. לקבלת סיוע נוסף בתהליך בחירת ממסר המצב המוצק, טבלה 2 מספקת דירוג מנוע SSR אופייני (FLA) לעומת דירוגים לשימוש כללי. ערך הרוטור הנעול הניתן בטבלה זו הוא המדד האמיתי של יכולת הזינוק של ממסר מצב מוצק, מאחר שזהו הפרמטר שנבדק וחייב לעמוד בדרישות UL. הנוהל הכללי לבדיקת UL הוא ש-SSR חייב לשרוד זרם הגדול פי 6 מהדירוג המלא למשך שניה אחת. הבדיקה חוזרת 50 פעמים במחזור של שניית הפעלה אחת, 9 שניות כיבוי, ועומס במקדם הספק 0.45.
הערה: טבלה 2 מייצגת את כל ה-SSR וה-SSC של Crydom המאושרים על פי תקן UL. מוצרים של יצרנים אחרים יכולים להיות בעלי ביצועים אחרים, וכתוצאה מכך לא בהכרח תואמים לכללי ההמרה של “דירוג לשימוש כללי לעומת ערך
FLA/LRA” שמוצגים בטבלה זו. נקודה אחרונה שיש לקחת בחשבון בעת בחירת ממסר מצב מוצק מתאים היא סוג מיתוג ההפעלה של הממסר/הקונטקטור מצב מוצק. לבקר מוטורי, בדרך כלל עדיפה גרסה של “הפעלה אקראית” או “הפעלה מידית” (חוץ מיישומים מוטוריים מסוימים עם מקדמי הספק נומריים גבוהים > 0.85), בשל האופי האינדוקטיבי הגבוה של העומס עצמו. תפוקות מסוג מתח אפס/חציית אפס/הפעלת אפס, שמציעות יתרונות גדולים בבקרת עומסי התנגדות, יכולות להיות חיסרון במקרים של מקדמי הספק נומריים נמוכים מאוד (בדרך כלל < 0.4). לסיכום, בחירה של ממסר מצב מוצק או של קונטקטור מצב מוצק בעלי דירוג בקרת מנוע היא תהליך פשוט, כאשר ידועים דירוגי HP או KW של עומס המנוע. עם זאת, אפשר להשתמש בכל ממסר מצב מוצק בדירוג לשימוש כללי באמצעות תהליך פשוט והטבלאות המתוארות במאמר זה.
למידע נוסף בקרו באתר החברה.
הכתבה באדיבות חברת מגוון טכנולוגיות