









מבוא
מאמר זה מציג אלגוריתם חדש לביצוע תהליך כיול אוטומטי (Auto Tune) של פרמטרי חוג הבקרה במערכת סרוו, המתבסס על חיפוש נומרי חכם על פני מרחב של מספר גדול של משתנים.
תהליך כיול אוטומטי מאפשר קביעה אוטומטית של פרמטרי הבקרה כך שביצועי החוג הפתוח (או הסגור) יקיימו תנאים כלשהם, ובעיקר שהמערכת תהיה מוכנה להפעלה ולתנועה של המנוע.
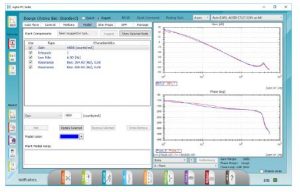
איור 1. התאמת מודל פרמטרי למערכת עם שני
רזוננסים
כמעט כול חברה המפתחת ומייצרת מוצרי בקרת הינע מתקדמים מספקת, ביחד עם תוכנת ההפעלה של המוצרים, גם כלים לביצוע תהליך כיול אוטומטי. כלים אלו הינם לעיתים בתחום התדר ולעיתים בתחום הזמן.
אולם, הכלים הקיימים כיום אינם מבצעים אופטימיזציה של התכן עבור הביצועים הנדרשים בפועל מהמערכת, אלא מבצעים תכן על פי סט של דרישות מובנות שברוב המקרים הגישה אליהן לא זמינה. גם בהינתן גישה של המשתמש אליהן, סט הדרישות הנתון אינו מאפשר התאמה מספקת כדי להבטיח שהתכן האוטומטי יפיק את סט הבקרה המתאים עבור הדרישות הספציפיות עבור ציר התנועה הנתון.
האלגוריתם החדש המוצג במאמר זה מאפשר רמות שונות של ממשקי משתמש, החל מהפעלה פשוטה על פי ערכי ברירת מחדל (בדומה לכלים הקיימים בשוק), דרך ממשק אינטראקטיבי וכלה בממשקים למשתמש המומחה המאפשרים לעצב את תגובת התדר (ובהמשך גם את התגובה בזמן) כך שהתכן יכוון לביצועים הספציפיים הנדרשים מציר התנועה.
תיאור הבעיה
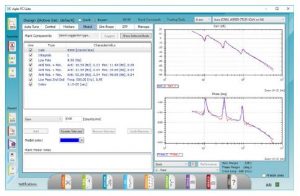
איור 2. התאמת מודל פרמטרי למערכת עם שלושה
צמדי אנטי-רזוננס ורזוננס
המשימה הראשונה העומדת בפני מהנדס הבקרה בבואו לבצע כיול של פרמטרי הבקרה של ציר תנועה נתון הינה להביא את הציר למצב של יציבות שיאפשר תנועה, ולו גם בביצועים נמוכים. המרחב הדינמי של פרמטרי הבקרה השונים (פרמטרי חוג מיקום, מהירות, כולל פילטרים מסוג Bi-Quad) הינו עצום ולכן כיול ידני, גם אם אפשרי, הינו תהליך שדורש ניסיון רב בתהליך עצמו, והיכרות עם הבקר המסוים שבו נעשה שימוש (מכיוון שאופן ייצוג הפרמטרים בבקרים השונים שונה).
הכלים הקיימים כיום בשוק עונים ברובם באופן סביר על פתרון הבעיה הזו ומאפשרים כיול אוטומטי של פרמטרי הבקרה למצב שבו ניתן לבצע הפעלות של המנוע ותנועות.
כלים אלו בוחנים בעיקר קריטריונים של שולי יציבות ותדר חציית הגבר 0db.
אולם, המשימה הכוללת העומדת בפני מהנדס הבקרה הינה לא רק להפעיל את המערכת אלא גם להביא אותה אל הביצועים הנדרשים, כאשר לכול ציר תנועה יש סט ביצועים נדרשים שונה, הנגזר מתוך הקריטריונים הבאים (רשימות חלקיות בלבד):
דרישות בתחום התדר:

איור 3. קביעה פשטנית של סט דרישות
רוחב סרט של החוג
שולי יציבות בהתאם לשינויים הצפויים במערכת
דחיית הפרעות חיצוניות
דחיית רעשים בתדרים גבוהים
הגבר בתדר נמוך
הגבר בתדר גבוה
דרישות בתחום הזמן:
Settling Time לתנועות נתונות
Overshoot
תנודתיות של התגובה
דיוק מהירות בתנועה במהירות קבועה
מהירות תגובה וביצועי עקיבה.
איור 4. תגובת החוג הסגור של המערכת
הדרישות השונות מורכבות מדרישות בתחום התדר ובתחום הזמן. כמובן, באופן תיאורטי, ישנו קשר חד חד ערכי בין דרישות בתחום התדר ודרישות בתחום הזמן וניתן לבטא את הדרישות, באופן תיאורטי, כך או כך. אולם, למהנדס הבקרה הדרישות נתונות בדרך זו או אחרת (מתוך אפיון המכונה וציר התנועה) והמעבר מסוג דרישות אחד לסוג דרישות אחר אינו פשוט גם עבור מומחים בתחום הבקרה.
כלי תכן אוטומטי אופטימאלי יידע לקבל את סט הדרישות הספציפי למערכת (הן בתחום התדר והן בתחום הזמן, הכול כפי שזמין למהנדס הבקרה) ולבצע תכנון אוטומטי של פרמטרי הבקרה כך שהתכן שיתקבל יענה, ככול האפשר, למגוון הדרישות הספציפיות מציר התנועה.
האלגוריתם והכלי המוצגים במאמר זה מאפשרים עקרונית תכן אוטומטי אל הדרישות הספציפיות של ציר התנועה הן בתחום התדר והן בתחום הזמן. התכן אל הדרישות בתחום התדר (בהתאמה לדרישות הספציפיות של ציר התנועה)

איור 5. ניתוח ביצועי המערכת בתחום התדר עם סט
פרמטרי הבקרה שתוכנן
זמין ומוכיח את עצמו בתכנונים רבים. התכן אל הדרישות בתחום הזמן נמצא בשלבי פיתוח ויהיה זמין בקרוב.
נתוני כניסה:
נתוני הכניסה לאלגוריתם המוצג במאמר זה הינם:
תגובת התדר של המערכת (עבור תכן לדרישות בתחום התדר)
סט דרישות בתחום התדר
סט דרישות בתחום הזמן
תגובת התדר של המערכת נמדדת כחלק מתהליך של Plant Identification הזמין בשיטות שונות בכלי התוכנה של החברה (וזמין גם אצל רוב יצרני מוצרי הבקרה בעולם כיום). מאמר זה אינו מתמקד בנקודה זו ומניח שתגובת התדר של המערכת זמינה (בוצע תהליך זיהוי ונמדדה תגובה התדר של המערכת, כתגובה בודדת או כסט של תגובות במצבים שונים). כאן המקום להעיר שכלי התכנון המוצג במאמר זה מקבל את כול סט תגובות התדר של המערכת ומבצע את התכנון כך שיתאים אופטימאלית לכול התגובות יחד.
איור 6. קביעת דרישות התכן ל- Auto Tune במוד
Advanced
מודל פרמטרי של המערכת, כחלק מתוכנה המסופקת עם מוצרי בקרה הינו חידוש ויוצג באחד הפרקים הבאים של מאמר זה. כלי זה מהווה חלק מה-PC Suite המסופק יחד עם מוצרי הבקרה של חברת אגיטו.
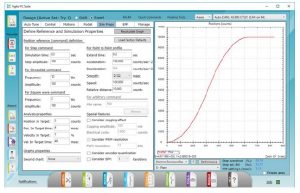
ה-PC Suite מאפשר הגדרה של דרישות בתחום התדר ובעתיד הקרוב גם בתחום הזמן, כאשר למשתמש ניתנת האפשרות האם לבצע את ההגדרות באופן הפשטני ביותר (רוחב סרט בלבד) ולתת למערכת לבצע החלטות של ברירת מחדל עבורו (ובכך בעצם לפגוע בהתאמה האופטימאלית של התכן לביצועים הנדרשים מהציר), או להגדיר את הדרישות הספציפיות מציר התנועה ולאפשר לכלי התכן לבצע תכנון אוטומטי בהתאמה.
עיקרון הפעולה של כלי ה-Auto Tune:
נתון מודל של המערכת (בתחום התדר ובמידת האפשר גם בתחום הזמן).
נתון סט של דרישות (שוב, בתחום התדר ובתחום הזמן, בהתאמה).
נתון סט פרמטרים שיש לבצע לו אופטימיזציה.

איור 7. קביעת דרישות התכן ל- Auto Tune במוד Advance
האופטימיזציה מוגדרת כהקטנה ככול האפשר של המחיר המחושב על ידי פונקציית מחיר
פונקציית המחיר בנויה כך שהמחיר שהיא מחשבת יקטן ככול שביצועי המערכת, הן בתחום התדר והן בתחום הזמן, יהיו קרובים לסט הדרישות שהוגדר
המחיר בתחום התדר מחושב תוך כדי שימוש בתגובת התדר הנתונה של המערכת
המחיר בתחום הזמן מחושב תוך כדי שימוש בסימולציה בתחום הזמן המבוססת על המודל הפרמטרי של המערכת
האלגוריתם מבצע סדרה של תהליכי חיפוש אוטומטיים למציאת סט פרמטרי הבקרה כך שהמחיר יהיה קטן ככול האפשר, ואתו יחד ביצועי המערכת יתקרבו ככול האפשר לקיום סט הדרישות שמוגדר על ידי המשתמש
הייחודיות של האלגוריתם הינה באופן החיפוש ובאופן בניית פונקציית המחיר כך שהחיפוש יצליח לאתר את הפתרון המתאים בתנאים שונים ובמרחב גדול של סט הפרמטרים.
חלקו של המשתמש בתהליך זה, כפי שיודגם בהמשך, הינו לקבוע את סט הדרישות וכמובן, ללחוץ על כפתור Run Auto Tune, את זה האלגוריתם עדיין אינו יודע לעשות בעצמו …

איור 8. תוצאת התכן בהגדלת הדרישה לתדר חצייה של 50
הרץ
מודל פרמטרי של המערכת
מודל פרמטרי של המערכת נדרש על מנת לבצע אופטימיזציה של פרמטרי הבקרה מול דרישות בתחום הזמן. כלי זה מהווה חידוש בתחום כליי התכן האוטומטי למערכות סרוו.
התמונות הבאות מציגות שני מודלים פרמטריים עבור שתי מערכות אמתיות. המודלים בנויים מאבני בניין יסודיות המרכיבות כול מודל של מערכת הנעה טיפוסית.
באיור מספר 1, למעלה, ניתן לראות את תגובת התדר המדודה של המערכת (קו אדום) ואת תגובת התדר של המודל (קו כחול), כולל תיאור המודל בצידה השמאלי של התמונה.
ניתן לראות שיש התאמה כמעט מושלמת בין התגובה המדודה לבין תגובת התדר של המערכת הפרמטרית. מכאן שהמערכת הפרמטרית מהווה תיאור מדויק של המערכת הפיזיקלית האמתית.
נקודה מעניינת הינה התוספת של רזוננס בתדר של 600Hz (מחוץ לתחום התדר הנמדד). תוספת זו נדרשה כדי לבצע התאמה של גרף הפאזה בתדרים הגבוהים (הרזוננס בתדר 600Hz משפיע על הפאזה באזור 400-500Hz בצורה בולטת).
מודל פרמטרי כזה יאפשר אופטימיזציה של תכן פרמטרי הבקרה אל דרישות בזמן באופן מדויק ואמין.
באיור מספר 2, למעלה, ניתן לראות את תגובת התדר המדודה של המערכת (קו אדום) ואת תגובת התדר של המודל (קו כחול), כולל תיאור המודל בצידה השמאלי של התמונה.
איור 9. תוצאת התכן בהגדלת הדרישה לתדר חצייה של 50Hz ובנוסף דרישה
חדשה להגבר נמוך בחוג סגור בתדר 200H
ניתן לראות שיש התאמה כמעט מושלמת בין התגובה המדודה לבין תגובת התדר של המערכת הפרמטרית. מכאן שהמערכת הפרמטרית מהווה תיאור מדויק של המערכת הפיזיקלית האמתית.
מודל פרמטרי כזה יאפשר אופטימיזציה של תכן פרמטרי הבקרה אל דרישות בזמן באופן מדויק ואמין.
קביעת סט הדרישות הספציפי
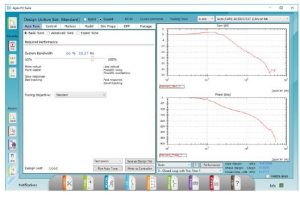
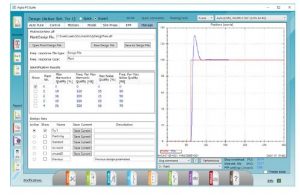
תמונה מספר 3 מציגה את הממשק הפשטני ביותר של אלגוריתם Auto-Tune, למקרה שמגוון הדרישות המפורטת מציר התנועה אינו זמין, או אינו נדרש (בשלב זה). מוד זה הינו מוד Basic.
בסימון בצבע אדום מופיעה קביעה של רוחב הסרט הנדרש (Cross Over Frequency). בדוגמא זו הדרישה היא לתדר חצייה של 20 הרץ. בסימון הכחול מופיעים קריטריונים לתכן (דגשים לתכנון האוטומטי) ובסימון הירוק מופיע הכפתור להפעלת תהליך האופטימיזציה.
תמונה מספר 4 מציגה את החוג הסגור לאחר ביצוע התכן (משך הזמן הנדרש לחישוב הבקר: כ-2 שניות). שימו לב לאינדיקציה בירוק בחלק השמאלי התחתון של התמונה: Good. אינדיקציה אוטומטית זו מתבססת על ניתוח נתוני שולי היציבות (הגבר ופאזה) ועל ההגבר המרבי בחוג הסגור.
איור 10 . ממשק אינטראקטיבי לשיפור ביצועי המערכת
תמונה מספר 5 מציגה את ביצועי החוג הסגור עם הבקר שתוכנן. ניתן לראות שתדר החצייה (Cross Over Frequency) הינו 19.989Hz (הנתון הרביעי ברשימה), קרוב עד כדי זהה לתדר החציה שהמשתמש ביקש. כמו כן ניתן לראות את שולי יציבות הפאזה (57 מעלות) וההגבר (מעל 20dB). כול אלו הינם תוצאות של ברירות המחדל של כלי האופטימיזציה.
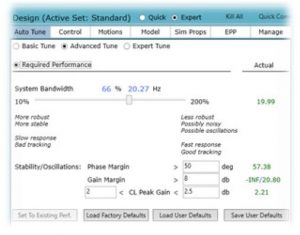
אבל אנו מחפשים את החידוש בכלי ה- Auto-Tune, כלומר את היכולת של המשתמש להתאים את דרישות בתכן לצרכים המסוימים של ציר התנועה. התמונות הבאות מציגות את מוד Advanced (תמונה 6) ואת מוד Expert (תמונה 7).
ניתן לראות שבמוד Advanced, כלי ה-Auto Tune נותן למשתמש אמצעי לשלוט על תכונות נוספות של תכן הבקרה, הכוללות: Phase Margin, Gain Margin and Peak Gain at Closed Loop.
ובמוד Expert, המוד המאפשר גישה מלאה לכול יכולות ה- Auto Tune, המשתמש יכול לעצב כרצונו את דרישות התכן של ה- Auto Tune. בתמונה מוצגות דרישות בתחום התדר והכלי יורחב בקרוב לדרישות בתחום הזמן.
במוד Expert המשתמש יכול לקבוע את דרישות התכן הבאות:
איור 11 . תגובת המדרגה של המערכת )סימולצייה(
הגבר חוג פתוח מינימאלי בתדר מסוים (וברשימה של תדרים).
הגבר חוג פתוח מקסימלי בתדר מסוים (וברשימה של תדרים).
הגבר חוג סגור (!) מינימאלי או מקסימלי, בתדר מסוים (וברשימה של תדרים).
הגבר תגובה להפרעות (!) מינימאלי או מקסימאלי בתדר מסוים (או ברשימת תדרים).
שולי פאזה מינימאליים.
שולי הגבר מינימאליים.
תחום (מינימום ומקסימום) להגבר חוג סגור מרבי.
תמונה 7 מציגה את הערכים האוטומטיים שיצר ה- Auto Tune (על פי ברירות מחדל ועל פי רוחב הסרט שביקש המשתמש) לבעיית התכן שהוצגה למעלה כחלק מההסבר של מוד Basic.
ניתן לראות שהדרישות מהגברי החוג הפתוח נקבעו כך, כדי לאלץ את ה-Cross Over Frequency להיות בערך הנדרש על ידי המשתמש. שאר הערכים נקבעו אוטומטית על פי ברירת המחדל של ה-Auto Tune ובהתאם לבקשת המשתמש לתכנון בגישת Standard.
איור 12 . תגובת Point To Point של המערכת )סימולצייה(
נקודה חשובה נוספת במוד Expert הינה היכולת לשלוט על האופטימיזציה של פילטרי Bi-Quad כחלק מהתכנון. המשתמש יכול לקבוע האם לבצע אופטימיזציה לכל אחד מהפילטרים במערכת. במקרה זה נבחר לבצע אופטימיזציה של הפילטר מסדר שני (LPF2) ולא לאפשר ל-Auto Tune לשנות את פרמטרי ה-Notch. ניתן כמובן להפעיל אופטימיזציה לפרמטרי ה-Notch, עם או בלי שינוי התדר של הפילטר.
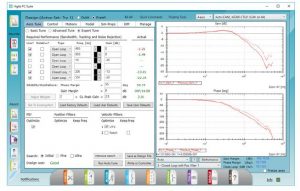
כדי לבחון את פעולתו של ה-Auto Tune, נעדכן כעת, תוך כדי שימוש בממשק ה-Expert את דרישות התכן.
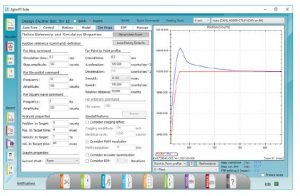
בשלב ראשון, בתמונה מספר 8, אנו רואים את התכנון שהפיק ה-Auto Tune (פחות משתי שניות זמן עיבוד מחשב) להעלאת דרישת תדר החצייה ל-50Hz. הקו המקווקו מציג את התכנון הקודם (לרוחב סרט של 20Hz). מטור תוצאות ה-Actual (מימין לדרישות התכן) ניתן לראות שה-Auto Tune הגיע בדיוק רב לתדר החצייה הנדרש אך, כ-Trade Off, לא עמד בדרישת ההגבר הנמוך בתדר 550Hz (נדרש הגבר קטן מ-, קיבלנו -14.7dB.
להידוק הדרישה של הגברים נמוכים בתדרים גבוהים (דחיית רעשים), נוסיף דרישה נוספת, הפעם בחוג סגור. ההגבר כרגע (ראו גרף) בתדר 200Hz הוא כ-. נוסיף דרישה להגבר קטן מ-בתדר זה (שימו לב, בתמונה מספר 8 דרישה זו כבר מופיעה, אך אינה מסומנת כ- Use? ולכן אינה נכנסת ל-Auto Tune).
והנה המסך של עדכון הדרישות ועדכון התכן באמצעות ה-Auto Tune המוצג בתמונה מספר 9. הקו המקווקו מציג הפעם את תגובת החוג הסגור לפני התוספת של הגבר נמוך בחוג הסגור ב-200Hz.
התוצאות מראות שעם תוספת הדרישה להגבר נמוך בחוג הסגור בתדר 200Hz, ה- Auto Tune הצליח לקיים את כול הדרישות בתדרים הגבוהים (ראה טור מספרי Actual), אך בתמורה לכך לא עמד בדרישת רוחב הסרט במלואה וגם משך את ההגבר המרבי בחוג הסגור לקצה התחום המותר. עם זאת, השינוי ברוחב הסרט הינו קטן ביותר, אך השיפור בהנחתת הרעשים בתדרים הגבוהים הינו משמעותי (כ-5dB בכול התדרים הגבוהים!).
איור 13 . תגובת Point To Point של המערכת )סימולצייה( – זום
על סוף התנועה
כמובן, כול תכנון חוגי בקרה הינה מערכת של דרישות ב-Trade Off. ה-Auto Tune הינו הכלי היחיד שיודע לקבל את דרישות הלקוח ולחפש את הפתרון במיטבי העונה, ככול האפשר על כול אוסף הדרישות (כולל תוך כדי התחשבות באוסף של תגובות תדר שונות של המערכת).
תכנון מתקדם אינטראקטיבי:
תכונה מעניינת נוספת המתאפשרת על ידי המבנה והאלגוריתם של ה-Auto Tuner, כמו גם על ידי ממשק המשתמש בתוכנת ה- PC Suite הנה לעדכן את דרישות התכן באופן אוטומטי כדי לבצע שיפור בביצועי המערכת המוגדר “בשפת איש הבקרה”.
לאחר ביצוע התכן ובדיקתו מול המערכת האמתית, ייתכן ויידרש שיפור של הביצועים. למשל, כדוגמא, נניח שזמן ההתכנסות של תנועה מסוימת ארוך מדי ואינו עונה על דרישות המערכת. בשלב זה המשתמש יכול לשנות את סט דרישות התכן, אך איזו דרישה לשנות כדי לקבל את השיפור המבוקש?
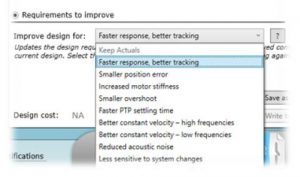
ובכן, ה-Auto Tune מכיל גם ממשק אינטראקטיבי לשיפור תכן הבקרה במטרה לענות על שיפור ביצועים, מתוך מבחר רב של בקשות לשיפור אפשריות, כמוצג להלן:
באמצעות ממשק זה המשתמש יכול להפעיל את ה-Auto Tune לביצוע סדרה של שיפורים אל מול מדידות הביצועים של המערכת. ה- Auto Tune יבצע עדכונים אוטומטיים של סט דרישות התכן כפי שנדרש כדי לענות על הדרישה הספציפית לשיפור ביצועי המערכת.
סימולציית ובדיקת ביצועים בזמן:
בהינתן מודל פרמטרי בנוסף לתגובת התדר של המערכת, ה-Auto Tune מאפשר ביצוע סימולציה בזמן (תגובת Point to Point and Step) ומדידה אוטומטית של ביצועי המערכת בתחום הזמן. להלן התגובות בזמן עבור הבקר שתוכנן בסוף התהליך למעלה (תדר חצייה מעט מתחת ל-50 הרץ):
כלי ה-Auto Tune מבצע חישובים של ביצועי התנועה בתחום הזמן (באופן דומה לביצועים המחושבים לתחום התדר והוצגו קודם לכן):
מכאן שה-Auto Tune יודע לבדוק את ביצועי המערכת בתחום הזמן (לדוגמא: Settling Time, Overshoot, רוחב סרט… ראו את הנתונים הנ”ל המוצגים בתמונה מספר 14) ובקרוב מאוד ה-Auto Tune יורחב כך שידע לבצע תכן אוטומטי של פרמטרי הבקרה אל מול דרישות בזמן (במקום או באופן מעורב עם דרישות בתחום התדר).
היתרון של דרישות בתחום הזמן הינו שדרישות כאלו מובנות הרבה יותר על ידי איש הבקרה וכמעט תמיד קיימות וזמינות כחלק מדרישות התכן של המערכת כולה (זמן תנועה, זמן התכנסות, דיוק מהירות וכדומה, הכול בהתאם למשימה שמבצע ציר התנועה).
לסיכום:

איור 14 . ניתוח ביצועי התנועה בתחום הזמן )על בסיס
תוצאות סימולציה(
במאמר זה הוצג אלגוריתם וכלי חדש לביצוע תהליך Auto Tune המתבסס על מנוע אופטימיזציה של מספר רב של פרמטרים (פרמטרי הבקרה) אל מול סט דרישות תכן בתחום התדר ובתחום הזמן, בחוג הסגור, בחוג הפתוח ובתגובה להפרעות.
כמובן, כול תכנון חוגי בקרה הינה מערכת של דרישות ב-Trade Off. ה-Auto Tune שהוצג במאמר זה הינו הכלי היחיד שיודע לקבל את דרישות הלקוח ולחפש את הפתרון המיטבי העונה, ככול האפשר, על כול אוסף הדרישות (כולל תוך כדי התחשבות באוסף של תגובות תדר שונות של המערכת).
הבקר שמתקבל לאחר הפעלת תהליך ה- Auto Tune לא רק יבטיח שהמנוע “יעבוד” אלא גם יבטיח עמידה בדרישות המערכתיות הספציפיות של ציר התנועה הרלוונטי!
תוכניות לעתיד:
כלי ה-Auto Tune שהוצג במאמר זה מבוסס על מנוע חיפוש ואופטימיזציה כלליים המאפשרים באופן עקרוני אופטימיזציה לדרישות שונות, הן בתחום הזמן והן בתחום התדר. התוכניות העיקריות של החברה הינן להרחיב את התמיכה כך שתכסה גם את הכיול האוטומטי עבור דרישות בתחום הזמן. לכך נדרש:
- בנייה אוטומטית של המודל הפרמטרי בתחום הזמן (כדי להתאים גם למשתמש לא מנוסה).
- הוספת ממשק משתמש להגדרת הדרישות בתחום הזמן (סימולציה וניתוח ביצועים כבר קיימים בכלי).
- הוספת תמיכה בהגדרת משקל (חשיבות) לכול אחת מדרישות התכן ובכך להעדיף שיקולי תכן מסוימים על פני האחרים.
מידע נוסף:
נציגי חברת אגיטו, שכלי האופטימיזציה המתואר במאמר זה משובץ בתוך תוכנת ה-PC Suite המסופקת עם מוצרי הבקרה של החברה, ישמחו להגיע למפגש ולהציג את העקרונות הטכניים העומדים מאחורי השיטה ביתר פירוט. אנא צרו קשר.
אייל ספיר הינו מייסד ובעלים משותף של חברת אגיטו מערכות הינע. אייל הינו בעל ניסיון רב שנים בתחום בקרת התנועה, בארץ ובעולם ועוסק בפיתוח ושיווק מוצרי מערכות בקרה (אלגוריתמים, תוכנה וחומרה) מזה כ-30 שנה.
אלגוריתם Auto Loop Shaping פותח על ידי ירון צימרמן ומהווה את הבסיס לטכנולוגיית Auto Tune של חברת אגיטו מערכות הינע. ירון הינו מהנדס בקרה בעל תואר שני בבקרה, בעלים ומנהל של חברת ספקטרום הנדסה בע”מ.
