









הפרעות ורעשים של GNSS באים במגוון צורות ומסווגים למספר קטגוריות.
חלקן הן הפרעות או שיבושים in band שנוצרו במכוון, אבל רבים מן המפריעים אינם מתוכננים ונובעים ממקורות כגון רדיו, טלוויזיה, שידורים אלחוטיים ורדאר.
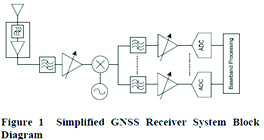
תמונה מס 1: סכימת בלוקים
מופשטת של מקלט GNSS
ללא ספק, הפרעות ל GNSS הולכות ומתרחבות בעולם אלחוטי וכיוון שיותר ויותר מערכות כוללות יכולות GNSS יש גם יותר מקרים של הפרעות פנימיות. בו בזמן יש יותר אותות מעבר לתחום ה GPS L1 שניתן להשתמש בהם החל מקליטת שידורי לוויין מתחת ל1599MHz לקליטת אות E6 מגלילאו. אותות pass band של מקלטי GNSS חייבים להתרחב כדי
לתמוך בכל התדרים בתחום הניווט אשר אינהרנטית חושפים אותם ליותר סיכון של הפרעות. תכנון המקלטים חייב להיות
מתוחכם יותר כדי להציע מצד אחד את מגוון התדרים ומצד שני יכולת ביטול השפעת ההפרעות.
במאמר זה אנו משתמשים בנתונים אמתיים ממקלטי NovAtel כדי להראות את השפעה של הפרעות שונות גם במעבדה וגם בשטח. שיטות לזיהוי ההפרעות מודגמות בדוגמאות אלו. לבסוף, מוצגת היעילות של ביטול ההפרעות. ניתן לראות כי מאפייני מקלט מדויק ורב תדרי נשמרים גם כאשר הוא עובד בסביבה רועשת תוך כדי ביטול רעשים אקטיבי.
הקדמה
למרות ששיטות ביטול רעשים ידועות מבחינה תיאורטית, המימוש שלהם באופן פרקטי בתכנון דורש שיקולים זהירים לגבי השפעתם על המערכת באספקט של צריכת הספק, משאבי מעבד ושיקולי גודל עבור רכיבים נוספים.
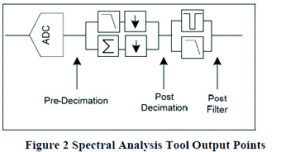
תמונה מס 2: נקודות מוצא של
כלי אנליזת הספקטרום במקלט
מקלט GNSS רב תדרי פרקטי צריך להיות בעל יכולת לביטול הפרעות יחד עם יכולת לספק את כל הפונקציונליות שהוא נותן במצב רגיל כמו יכולת RTK בדיוק של סנטימטר ובשימוש במגוון תדרים וקצבים גבוהים והכל עם הספק סביר וגודל פיזי על פי המוגדר.
במאמר זה מודגם כי קביעת מצב אופטימלי של המקלט על ידי חלוקה נכונה מחדש של ההגבר באמצעות מנגנון משודרג ומערכתי של בקרת הגבר, מקטינה את ההפרעות כתוצאה מאינטרמודולציה עם קיום הפרעות ומביאה לתוצאות טובות יותר מבחינת עמידות להפרעות. נראה כי הוספת ביטים נוספים כתוצאה מהגדלת הרזולוציה של ה ADC מאפשרת למקלט להתמודד עם הפרעות חזקות מצד אחד יחד עם אות חלש (מתחת לרצפת הרעש התרמית עבור GNSS) מצד שני אשר מגדיל את המרחב הדינמי של המקלט בנוכחות רעשים. זה מאפשר שימוש אפקטיבי בפילטרים כדי לנטרל הפרעות פנימיות וחיצוניות.
ארכיטקטורה של המקלט
ניתן לראות כאן תיאורhigh level של ארכיטקטורה של מקלט [1] מדויק מאוד [איור 1] .
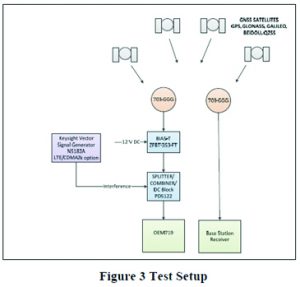
תמונה מס 3: מבנה הניסוי
בדרך כלל משתמשים באנטנה אקטיבית באיכות גבוהה (המכילה מגבר LNA LOW NOISE) יחד עם מקלטי GNSS מדויקים אשר יקבעו את רצפת הרעש של המערכת: האות הנקלט מסונן, מוגבר, מבוצע תהליך down conversion, ומומר דיגיטלית להמשך עיבוד. ההגבר של הfront end מבוקר על ידי AGC כדי לשמור על רמה אופטימלית של האות הנקלט לתוך ממיר הADC (ממיר אנלוגי לדיגיטלי). לאחר מכן האות עובר דצימציה אשר מאפשרת להוסיף מסננים לפני עיבוד אות ה GNSS.
סינון היא דרך מצוינת להתמודד עם הפרעות. הדרך הרגילה לשימוש במסנן היא באזור האנאלוגי על ידי שימוש ברכיבי חומרה אשר יגרמו לאות לעבור באופן אופטימלי וחד ככל האפשר. קיימים מגוון פילטרים כאלה באנטנה ובאזור ה RF אולם אלה מסוגלים להתמודד טוב עם אותות מחוץ לתחום ופחות עם הפרעות בתוך התחום הנקלט ולמנוע את כניסתן למקלט וסינונן באופן אנלוגי הופך ללא פרקטי. הסוג הנוסף של סינון הוא דיגיטלי. ישנם מסננים דיגיטליים אשר מתמודדים עם מפריעים לא רצויים באזור הנקלט וחלקם נותן תגובות תדר כמעט אידיאליות.
עבור מימוש מערכת פרקטית, חשוב לאזן בין יכולת קליטת אותות נתמכים והסיכוי לקיום הפרעות לבין החלוקה של המסננים בתוך המקלט אשר יגנו עליו כדי לקבל גודל, הספק וביצועים אופטימליים.
סדרת מקלטי ה GNSS ה- OEM7 של חברת NovAtel משתמשת ביכולת זיהוי וביטול הפרעות. מקלטים אלה עובדים בהספקים נמוכים בתנאים טובים יחד עם שילוב תוכנה בעלת קונפיגורציה שתאפשר להם לעבוד בסביבת מפריעים. הדבר מבוצע על ידי הגדלת הלינאריות של אזור הfront end, כיול ההגבר של המערכת בשלבים שונים כדי ללכוד את אות ה GNSS ועל ידי שימוש מושכל במסננים. לשילוב יכולות זה קוראים HDR – High Dynamic Range .
השפעות של מפריעים
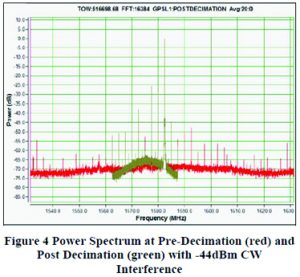
תמונה מס 4: ספקטרום ההספק לפני
דצימציה )אדום( ואחרי דצימציה )ירוק( –
מפריע CW
מקלט GNSS מסורתי אמור להיות רגיש מספיק כדי לקלוט אותות מתחת לרעש התרמי – הספק אותות GPS L1 על כדור הארץ נע בין -120dBm לבין -130dBm . לא צריך מפריע חזק כדי להשפיע על רעש המקלט באזור הנקלט. משתמש יצפה בשינויים ברמת ה C/No כגון ירידה כללית של רמת האות לרעש או חוסר יציבות. המשתמש יחזה בבעיות נעילה וחוסר יכולת לקלוט את תדר ה GNSS.
סוגים שונים של מפריעים יגרמו להשפעות דומות על המקלט במונחים של יכולות עקיבה. הדבר מהווה קושי בזיהוי של סוג המפריע ופעמים רבות תהליך של ניסוי וטעיה משמש לבחירת שיטת ביטול הרעשים המתאימה ביותר.
סוגי מפריעים
הפרעות מסווגות על פי שלושה מאפיינים עיקריים:
מיקום תדר: הפרעות בתוך תדר המעבר של המקלט (in-band); הפרעות מחוץ לתדר המעבר של המקלט(out of band) .
תחום התדר: גל מתמשך ;continuous wave (CW) מפריע צר סרט narrow band (NB); מפריע רחב סרט wide band (WB);
תחום הזמן: חלק מההפרעות מופיעות כפולסים.
ההשפעה של מפריעים כפולסים על מקלט GNSS אינה חמורה. מקלטי OEM7 של NovAtel מסוגלים כבררת מחדל להתמודד עם מפריע חזק בדמות פולסים ויכולת נוספת מאופשרת ע”י טכניקת blanking של עיבוד אות שאינה מתוארת במאמר זה.
שיטות זיהוי (דטקציה) של מפריעים
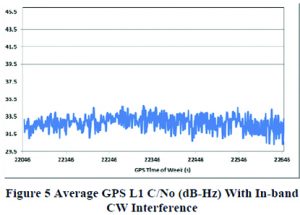
תמונה מס 5: ממוצע של dB/Hz( C/No ( עבור
GPS L1 – מפריע C
היכולת להתבונן על הספקטרום כפי שהמקלט רואה הוא כלי חזק בדיאגנוזה של סוג המפריע הקיים. כלי האנליזה של הספקטרום על גבי ה OEM7 של NovAtel מראה את פיזור ספקטרום ההספק באמצעות FFT בשלבים שונים לאורך שרשרת הקליטה: לפני דצימציה, אחרי דצימציה, אחרי פילטור במידה וקיים, כפי שמוצג באיור 2.
אנליזת הספקטרום מתבצעת באופן רציף על גבי מקלטי OEM7 על מנת לפקח על הסביבה.
בן אנוש יכול לבחון גרפים של הספקטרום ולהבחין בקלות בהשפעות של מפריעים וזו הסיבה שכלי לניתוח הספקטרום ותוכנה להצגת גרפים מסופקת למשתמש. על מנת שהמקלט יהיה מסוגל לזהות מפריעים באופן אוטומטי, זיהוי הצורות שנעשה בקלות ע”י בן אנוש חייב להיות מתורגם ללוגיקה של מכונה עם דקדקנות שתבטיח זיהוי מדויק.
בכדי לזהות מפריעים, משתמשים בספקטרום ייחוסי ושימוש בספים משתנים לזיהוי הפרעות. שיטת ה FFT די רגישה לנוכחות מפריע צר סרט וגם לחלק מהמפריעים רחבי הסרט אך אינה רגישה למפריעים מחוץ לתחום תדר המקלט הממוקמים רחוק מתדר המעבר או ממפריעים רחבי סרט שבאופן כללי מעלים את רצפת הרעש. שימוש במנגנון בלעדי של ה OEM7 מאפשר עקיבה אחרי הספק אות הכניסה למקלט באמצעות כיול המקלט במפעל. כאשר הספק הכניסה חורג מהערך המצופה התרעה ניתנת למשתמש כולל פוטנציאל לנוכחות של מפריעים. הפרעות נוספות בשרשרת עיבוד האות יכולות לתת אינדיקציה לנוכחות מפריעים. תחת תנאים רגילים פונקציית ההסתברות לצפיפות ההתפלגות אחרי ה ADC צריכה להיות במקורב גאוסיאנית. בנוכחות מפריעים, תנאי זה לא יתקיים ובאמצעות זיהוי התפלגות שאינה גאוסיאנית ניתן להמשיך ולוודא את רמת ההפרעה.
שיטות למזעור השפעת מפריעים
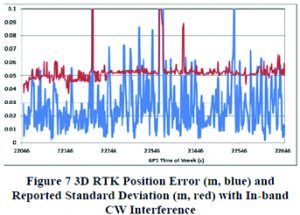
תמונה מס 7: שגיאת מיקום ) 3D RTK )m )כחול(
וסטיית תקן ) m( )אדום( – מפריע C
כאשר נוכחות מפריע וודאה יש ליישם שיטות למזעור השפעתו. כחלק מהInterference Tool Kit הקיים במקלטי OEM7 של חברת NovAtel פילטרים מתוכנתים מאופשרים על מנת לחדד את הroll-off מעבר לתחום תדר המעבר של ה GNSS. ההתמודדות הטובה ביותר עם המפריעים ניתנת להשגה באמצעות הטווח דינמי הגבוה של מקלטי NovAtel שקיים בזכות שילוב של ADCים עם טווח דינמי גבוה, תחום לינארי של המקלט ב frontend ופילטר lowpass עם roll-off חד המיושם לאחר הדצימטור. חלק או כל שיטות ההתמודדות נדרשות כתלות בסוג המפריע.
מבנה הניסוי ותוצאות
להצגת יעילות שיטות ההתמודדות עם מפריעים, שלוש דוגמאות מעשיות מוצגות להלן: גל מתמשך בתוך תחום התדר, הפרעה צרת סרט מחוץ לתחום התדר והפרעה רחבת סרט מחוץ לתחום התדר.
כיוון שGPS L1 הינו האות המוכר ביותר לרב המשתמשים, פס התדר סביב1575.42MHz מוצג בכל שלוש הדוגמאות. שיטות ההתמודדות ניתנות ליישום לכל אותות ה GNSS אשר כולם ניתנים לעקיבה באמצעות מקלטי ה OEM7 .
מבנה הניסוי הכללי מוצג באיור 3. מקלטים בכל ניסוי עוקבים אחרי אותות GPS מאנטנות high performance (GPS-703-GGG) המותקנות על תחנות קבועות עם קואורדינטות ידועות על גג בניין NovAtel בקאלגרי שבאלברטה קנדה. אנטנת GPS-703-GGG הינה רחבת סרט התומכת בשלושה תדרי GPS (L1, L2, L5) ו GLONASS (L1, L2, L3) ושני תדרים Galileo (E1, E5a/b) ו BeiDou (B1, B2). אותות המפריעים הופקו באמצעות מחולל אות מסוג Keysight Vector והוצגו למערכת בכניסת ה RF של המקלט. היחידה במבחן הינה OEM719 שתומכת בתדרי GPS (L1 C/A, L1C, L2C, L2P, L5), GLONASS (L1 C/A, L2C, L2P, L3), BeiDou (B1, B2, B3), Galileo (E1, E5 AltBOC, E5a, E5b, E6), and QZSS (L1 C/A, L1C, L2C, L5, L6) ובנוסף ל L band עבור קליטה של שירותי תיקון.
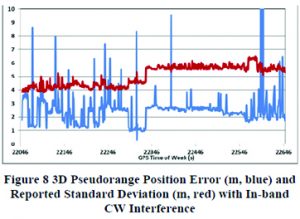
תמונה מס 8: שגיאת מיקום ) 3D Pseudorange )m )כחול(
וסטיית תקן ) m( )אדום( – מפריע C
בכל אחד מהניסויים, מתוארים סוג המפריע, ביצועי המקלט בנוכחות המפריע עם ובלי הפעלת שיטה למזעור השפעתו.
ביצועי המקלט מאופיינים על יד דיווח ה C/No, מספר הלוויינים שעוקבים ושגיאת המיקום.
כהשוואה ניתן לומר שערכים נורמליים של C/No עבור GPS L1 נמדדים בין 45 ל 55dB/Hz בזויות הגבהה של יותר מ 40 מעלות. ביצועי L1/L2 RTK עם תחנת בסיס במרחק כ 5 מטר יתנו מיקום טוב מ 1cm (1 sigma ).דיוק מדידה של GPS L1/L2 ללא RTK (single mode ) יהיה טוב מ 3 מטר. נראה גם את הספקטרום הנמדד על ידי מקלט ה OEM719 כדי להראות את המפריע ואת ביטולו.
מפריע IN-BAND CW
מפריע מסוג זה בד”כ מופיע ללא כוונה ונוצר כאשר המערכת כוללת אינטגרציה עם אלקטרוניקה נוספת שמייצרת תדרים משלה כגון שעון של מעבד או הרמוניה שלו. מפריעים פוטנציאליים נוספים: הרמוניה 12 של שידור VHF 230, הרמוניה שנייה של 3GFP E- Ultra .
בשנייה 22046 מוזרקת הפרעה פנימית בתדר 1582.5Mhz עם הגבר של -44dBm לתוך כניסת המקלט. ניתן לראות את ספקטרום ההספק באיור 4 עם Spike בצד ימין של מרכז תדר GPS L1 .
ממוצע C/No יורד ביותר מ 10dB/Hz לרמת ה 30 עם תנודתיות של 2dB/Hz – איור 5.
כמות הלוויינים הנקלטים (אלו בעלי זוגיות ידועה ונעולי פאזה) נע בין 5 ל 7.
מושג מיקום RTK אבל עם פגיעה בדיוק ושגיאת 3D של יותר מ 1cm כפי שניתן לראות באיור 7. ניתן לראות באדום את סטיית התקן 1 sigma המדגימה את השגיאה באיור 8.
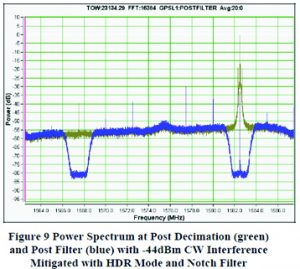
תמונה מס 9: ספקטרום ההספק לאחר דצימציה
)ירוק( ולאחר הפילטר )כחול( – ביטול מפריע CW
עכשיו מאתחלים את המקלט לשימוש ביכולת HDR כדי להכניס לפעולה פילטר (notch) ברוחב1MHz . באיור 9 ניתן לראות את הספקטרום לאחר הפעלת הפילטר. המפריע עדיין קיים לפני הפילטר אך מבוטל לאחריו. ניתן גם להתרשם מהשיפור בלינאריות של אות הL1 באיור 9 לעומת איור 4.
שימוש בפילטר במצב HDR עבור L1 ו L2 מעלה את צריכת ההספק של המקלט ב 0.23Watt . רמת יחס אות לרעש מתאוששת לכיוון 40dB/Hz וכמות הלוויינים הנקלטים עולה מ 6 ל 12 .
גם שגיאת המיקום קטנה כאשר כמות הלוויינים עולה כמו שניתן לראות באיורים 12 ו 13 עבור שמיים פתוחים גם ב RTK וגם במוד עצמאי.
מפריע צר סרט – OUT OF BAND
מפריע מסוג זה שנמצא קצת מעבר לתחום ה GPS L1 יכול לחדור לתוך התחום ולהוריד את יכולת העקיבה של המקלט עד למצב שבו לא ניתן לקבל מיקום מדויק. מפריע פוטנציאלי מסוג זה הוא תקשורת של שירות לוויין Globalstar .בשירות זה משתמשים בטכנולוגיית Qualcomm CDMA2000 כדי להציע תקשורת של נתונים ושיחות על גבי רשת לווייני LEO. שירות הטלפוניה בשימוש במקומות נידחים ללא כיסוי סלולרי ולשירותי הנתונים ייעוד משלהם. מערכות מסוג זה בדרך כלל כוללות גם מקלט GNSS והדרך הפשוטה כדי למנוע הפרעה היא על ידי הרחקת האנטנות בלפחות 10 מטר אך לא תמיד זה מתאפשר.
בבדיקה זו נעשה שימוש באות דומה ל Globalstar האמיתי – 1.2288MHz CDMA2000 ובוצעה הפרדה בין האנטנות של 1 עד 3 מטרים.
הפרעה בהספק של -14dBm מוזרקת לכניסת מקלט ה OEM719 בזמן GPS של 359072 שניות. באיור 14 ניתן לחזות באפקט של ההפרעה על הספקטרום. ה “גבעה” בתדר 1625MHzהיא ההספק של ההפרעה. שאר הספקטרום מראה עיוות כתוצאה מנוכחות אות חזק זה ואות ה GPS L1 מונחת.
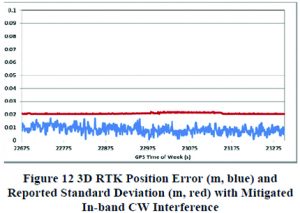
תמונה מס 12 : שגיאת מיקום ) )m
3D RTK )כחול( וסטיית תקן ) m( )אדום(
– ביטול מפריע C
גם פה ניתן לראות רמות C/No המגיעות לאזור הנמוך של ה30.
כמות הלוויינים מראה כי המקלט מתקשה לעקוב וסה”כ כמות הלוויינים נעה בין 4 ל6.
יש לזכור כי מינימום של 5 לוויינים נדרשים לפתרון מיקום RTK מלא )כולל פתרון אי-וודאויות(. ניתן להשיג פתרון RTK אך עם שגיאה גבוהה מאוד – איור 17. לקראת סוף התחום ניתן לראות כי לאחר קליטת 2 לוויינים נוספים הפתרון מתכנס שנית אך שוב לא לערכים מספקים.
בזמן GPS של 359700 המקלט אותחל לעבוד ב HDR והעלה את צריכת ההספק ב 0.2W.
באיור 19 ניתן לראות את הספקטרום במצב זה. העיוות ירד משמעותית בהשוואה לאיור 14.
במצב HDR, ממוצע יחס האות לרעש באיור 20 עדיין מתחת לרצוי אבל תוספת של 4dB/Hz היא משמעותית. יותר מכך, כמות הלוויינים עלתה ל 10 מרמה של בין 4 ל 6 בלבד.
מבדיקה של גרף המיקום ניתן לראות שהביטול היה אפקטיבי: איור 22 מראה את שגיאת המיקום ב 3D של RTK שהגיעה לטווח של סנטימטר.
מפריע רחב סרט – OUT OF BAND
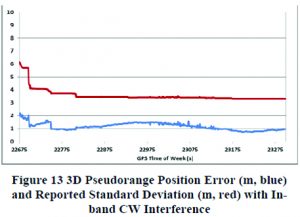
תמונה מס 13 : שגיאת מיקום ) )m
3D Pseudorange )כחול( וסטיית תקן
m( ( )אדום( – ביטול מפריע C
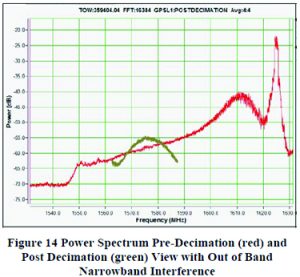
תמונה מס 14 : ספקטרום ההספק
לפני דצימציה )אדום( ואחרי דצימציה
)ירוק( – מפריע צר סרט
אות LTE ברוחב 10MHz נוצר על ידי מחולל אותות מסוג Agilent עם אופציית LTE כדי ליצור מפריע פוטנציאלי מטלפונים ברשת 4G. המפריע הוזרק לכניסת המקלט בעוצמה של -28dBm בזמן GPS של 414,415 שניות.
איור 24 מראה את ההשפעה על הספקטרום.
רמות ה C/No מוצגות באיור 25 וכמות הלוויינים הנעקבים המצב זה היא שלושה.
עם שלושה לוויינים בלבד לא ניתן לספק שום פתרון מיקום.
כדי להתמודד עם מפריע זה המקלט אותחל למוד HDR בזמן GPS של 415033 שניות.
הספקטרום באיור 27 מראה שיפור דרמטי בביצועי המקלט – ניתן לראות בבירור את אות GPS L1 יחד עם שיפור בלינאריות.
רמות ה C/No באיזור ה 43.5dB וכמות הלוויינים הנעקבים עלתה ל 10.
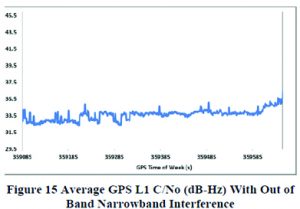
תמונה מס 15 : ממוצע של C/No
dB/Hz( ( עבור GPS L1 – מפריע צר סרט
שימוש ב HDR העלה את צריכת ההספק ב 0.2W עבור .GPS L1/L2 כעת ניתן לקבל דיוק של סנטימטר במוד RTK כפי שניתן לראות באיור
מסקנות
ביצועי המקלט שהוצגו בגרפים בסעיף הקודם מסוכמים בטבלאות 1-3

טבלה 1 – סיכום ביצועי המקלט לפני ואחרי הפרעה מסוג in band CW
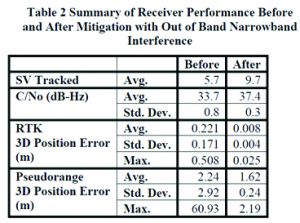
טבלה 2 – סיכום ביצועי המקלט לפני ואחרי הפרעה מסוג out of band צרת סרט
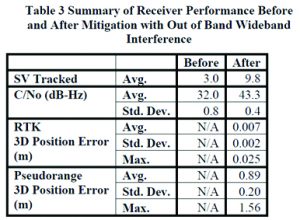
טבלה 3 – סיכום ביצועי המקלט לפני ואחרי הפרעה מסוג out of band רחבת סרט
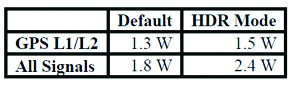
טבלה 4 מציגה את צריכת ההספק של OEM719 במצבי הפעלה של ברירת מחדל ו HDR בשתי שיטות עקיבה: קונפיגורציה של GPS L1/L2 כפי שהוצג במקרי הבוחן לעיל ובמקרה של קונפיגורציה כללית בעקיבה של כל סוגי האותות. ביטול מפריע in-band CW כלל גם notch filter שצרך הספק נוסף של 0.025W.
בכל שלושת המקרים, האינדיקציה למשתמש שההפרעה נוכחת הייתה הפחתה ביכולת העקיבה שהתבטאה גם במספר הלוויינים שנעקבו וגם באיכות אותות העקיבה שמתבטא בהפחתה של C/No שבסופו של דבר הציג איכות ירודה או אי מציאת פתרון למיקום. ספקטרום ההספק שחושב והתוצאות בכל אחד מהמבחנים הראו איך המפריע השפיע על הספקטרום שהמקלט רואה, וההשפעה הזו משתנה כתלות בסוג המפריע. עבור אינטגרטור של מערכת אינפורמציה זו הינה בעלת ערך המאפשרת לדעת אם הבעיה נוצרה מתוך המערכת ומה יכול להיות מקור ההפרעה.

תמונה מס 16 : כמות לוויני GPS
נעקבים – מפריע צר סרט
HDR mode מהווה כלי עוצמתי לביטול רעשים. כלי זה מאפשר למקלט השגת ביצועים זהים בנוכחות ההפרעה לביצועים של המקלט ללא נוכחות ההפרעה. במחיר של צריכת הספק של 0.2W המיושם על GPS L1 ו L2, דיוק ברמת 1 סנטימטר של פתרון RTK הינו בר השגה לעומת מצב בו לא היה פתרון כלל במקרה של מפריע רחב סרט בתחום שמחוץ לפס ללא HDR.
במקרה של מפריע מסוג in-band CW, שילוב של notch filter ו HDR הכרחי להשגת ביצועים טובים. Notch filter לבדו שימושי כאשר מפריע CW הינו חלש, אבל כאשר המפריע הינו חזק מספיק כדי לחולל עיוות בתדר המעבר, שיפור הלינאריות המושגת באמצעות ה HDR מאפשרת ל notch filter לבטל את מפריע ה CW בצורה נקייה.
מראי מקום:
[1] E. D. Kaplan and C. Hegarty, Understanding GPS:
Principles and Applications, Artech House Publishers,
2nd edition, 2005
למאמר המלא:
תורגם וקוצר על ידי איתן דרייפוס מחברת WALDYTECH

תמונה מס 27 : ספקטרום ההספק
לפני דצימציה )אדום( ואחרי דצימציה
)ירוק( – ביטול מפריע LT
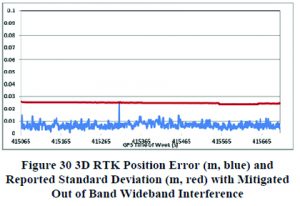
תמונה מס 30 : שגיאת מיקום ) m
3D RTK ) )כחול( וסטיית תקן ) )m
)אדום( – ביטול מפריע LT

תמונה מס 22 : שגיאת מיקום ) m
3D RTK ) )כחול( וסטיית תקן ) )m
)אדום( – ביטול מפריע צר סרט

תמונה מס 25 : ממוצע של ( C/No
dB/Hz ( עבור GPS L1 – מפריע LT
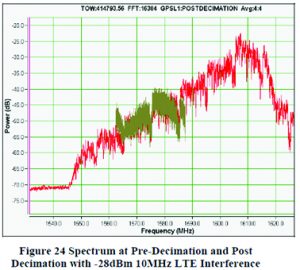
תמונה מס 24 : ספקטרום ההספק לפני
דצימציה ואחרי דצימציה –מפריע LTE
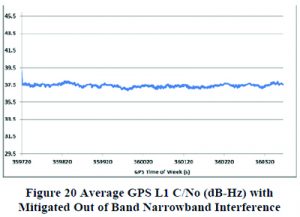
תמונה מס 20 : ממוצע של C/No
dB/Hz( ( עבור GPS L1 – ביטול
מפריע צר סרט
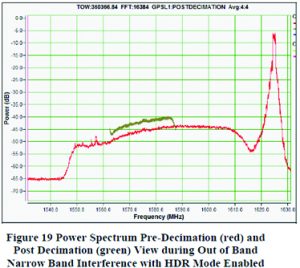
תמונה מס 19 : ספקטרום ההספק
לפני דצימציה )אדום( ואחרי דצימציה
)ירוק( – ביטול מפריע צר סרט
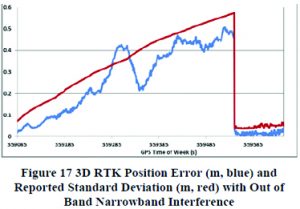
תמונה מס 17 : שגיאת מיקום 3D
m( RTK ( )כחול( וסטיית תקן ) )m
)אדום( – מפריע צר סרט
