

 מאת: דודו כהן, אלקטרונדארט
מאת: דודו כהן, אלקטרונדארט
רכיבים קריטיים המשמשים בגרסאות האחרונות של המערכת הכירורגית da VinciTM S HD Surgical System כוללים את המנועים באיכות הגבוהה שמספקים פעולה ללא עצירות גם במהירויות נמוכות.
הניתוחים המתקדמים ביותר של הדור הבא מתבצעים היום בעזרת המערכת הכירורגית da VinciTM S HD של חברת Intuitive Surgical Inc (השוכנת בסאנווייל בקליפורניה), אשר מאפשרת למנתחים לבצע את הפרוצדורות הכירורגיות באופן הכי פחות פולשני. המערכת משלבת את הרמה הגבוהה של טכנולוגיות בקרת תנועה, באופן כזה שכל תזוזה מספקת את התנועות המדויקות והחלקות המזכירות את תנועותיו של מנתח מיומן – גם במהירויות נמוכות ומחושבות. במהלך השנים האחרונות ככל שהחידושים הטכנולוגיים המשיכו והתפתחו בתחום של תעשיית בקרת התנועה, חברת Intuitive Surgical לא הפסיקה לשדרג את המערכת da Vinci S HD מתוצרתה, על ידי שימוש ברכיבים ובבקרות הטובים ביותר שנמצאים בשוק, על מנת להגיע למערכת da Vinci S HD אשר ממשיכה לבצע ניתוחים מצילי חיים. כל מערכת da Vinci S HD כוללת 39 מנועי maxon.

- איור 1. מערכת כירורגית da Vinci TM S HD


- איור 2. שולחן הניתוחים עם עגלת המכשירים שבצד המטופל


- איור 3. עגלת המכשירים בצד המטופל


- איור 4. ארגון של המכשירים הלאפרוסקופיים
המערכת הכירורגית
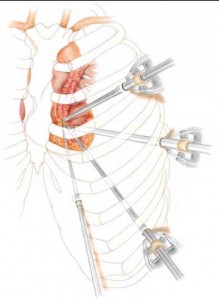
להפעלת המערכת הכירורגית עצמה אין נדרשים אלא שני פתחים ברוחב 8 מ”מ ופתח אחד ברוחב 12 מ”מ, לצורך החדרה של שני מניפולטורים ומצלמה אל גוף החולה. רק הרובוט וסייעים כירורגיים ניצבים מעל החולה, בשעה שהמנתח, המפעיל את המערכת, יכול להיות בקצה האחר של החדר, בעמדת המנתח, אשר בה שוכפלו במדויק המראה והתחושה של ניתוח פתוח.
המערכת הכירורגית da Vinci S HD תוכננה להיות חלק בלתי נפרד מחדר הניתוחים. היה עליה לתמוך בצוות הכירורגי כולו, בדיוק כפי שמצופה מכל איש צוות אחר. כל המערכת מתבססת על שלושה רכיבים נבדלים, שהם עמדת המנתח, עגלת המכשירים הרפואיים שנמצאת לצדו של המטופל וציוד המשמש לעיבוד תמונה.
עמדת המנתח היא החלק שהתרומה שלו ליכולתה של המערכת הכירורגית da Vinci S HD לבצע ניתוחים, היא החשובה מכל. ניסיונות אחרים שנעשו בביצוע ניתוחים תוך כדי שימוש בווידיאו הוכחו כבעייתיים. האתגר השכיח ביותר שעמו המנתח היה צריך להתמודד, הוא זה הכרוך בהיפוכי כיוון. חשוב לרגע שאתה צריך לשרוך את שרוכי הנעליים שלך עם מקלות אכילה סיניים. כאשר תעביר את מקלות האכילה שמאלה, הקצה שלהם ינוע ימינה. זוהי התנועה הנוגדת את האינטואיציה שאותה חווה מי שמבצע ניתוח מסורתי בעזרת לאפרוסקופ. בשלב כלשהו, המנתח היה צריך להתגבר על תנועות נוגדות אינטואיציה אלו בהתבסס על ניסיונו.
באמצעות השימוש במערכת הכירורגית da Vinci S HD, המנתח יכול לבצע את הניתוח בזמן שהוא יושב בנוחות בעמדת המנתח, צופה בהצגה – חזותית, תלת ממדית שאין כמותה וברזולוציה גבוהה – של אזור הניתוח. בהיותה המערכת הכירורגית הרובוטית הראשונה בעולם עם ראייה תלת ממדית ברזולוציה גבוהה, היא מספקת רזולוצית צפייה יעילה פי שניים מהדגמים הישנים יותר ומציעה כיום בהירות משופרת בצד הפרטים של משטחי הרקמות ואברי גוף קריטיים. מערכת הראייה InSiteTM, האנדוסקופ ברזולוציה HD הגבוהה בתלת ממד והציוד לעיבוד תמונה, המשמשים במערכת, מספקים תמונות אמיתיות עד כדי מציאותיות של האזור המנותח. תמונות הניתוח עוברות שיפור, כוונון מחדש ואופטימיזציה באמצעות השימוש במכשירים לסנכרון תמונה, במקורות אור בעוצמה גבוהה וביחידות לבקרת מצלמה.
בנוסף, בעמדתו, המנתח מבצע תנועות בעזרת master (שמחקה תזוזה שקיימת בניתוח). אצבעותיו של המנתח אוחזות בידיות הבקרה של ה-master, שנמצאים מתחת לתצוגה, כאשר פרקי כף היד מונחים יחסית לעיניו באופן טבעי. לאחר מכן, התנועות של המנתח מיתרגמות באופן חלק לתנועות מדויקות בזמן אמת המתרחשות בגופו של המטופל.
המנתח שולט במניפולטורים הרובוטים דרך פרק כף היד, היד ותנועות אצבע, בדיוק כפי שהיה קורה אילו היה נערך ניתוח אופייני. אפשר לקבל טווח מקיף של מכשירים רפואיים מסוג EndoWristTM שקיים כאופציה עבור המערכת. מכשירים רפואיים אלו מתוכננים עם שבע דרגות תנועה שמחקה מיומנות של פרק כף יד אנושית. לכל מכשיר יש משימה ייחודית במהלך הניתוח, למשל הידוק במלחציים, תפירה ומניפולציה ברקמות.
העגלה שלצדו של המטופל מאחסנת שתי זרועות רובוטיות וזרוע אחת עם אנדוסקופ, שמשכפלת את תנועותיו של המנתח. אפשרויות המערכת זמינות עבור זרוע רובוטית שלישית ומאפשרות למנתחים להשתמש במכשיר אנדוסקופי נוסף ולהוסיף ערך נוסף ליכולות הכירורגיות. הזרועות הלאפרוסקופיות מסתובבות על ציר בנקודת הפתח של הניתוח, ומונעות בכך את הצורך להשתמש בדופן הגוף של המטופל לצורך תמיכה. באופן כזה נמנע נזק לרקמות ולעצבים. אנשי צוות תמיכה כירורגית מתקינים את המכשירים הנכונים, מכינים את נקודת הפתח בגוף המטופל ומפקחים על הזרועות הלאפרוסקופיות ועל הכלים שבהם משתמשים.
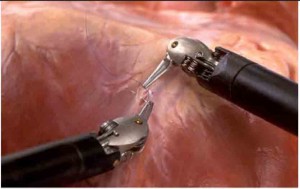

- איור 5. העמדות השולטות – Masters (בתחתית התמונה) ומכשירי EndoWristTM (בתמונה העליונה)


- איור 6. מכשירי EndoWristTM


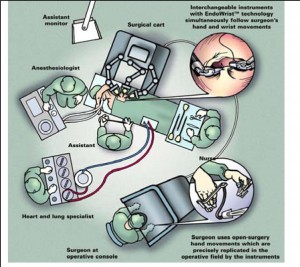
- איור 7. ארגון סכמתי של חדר ניתוחים
בחירת המנועים
לצורך ביצוע מניפולציה של כלי כירורגיה רובוטים דרך פתחים קטנים (8-10 מ”מ) שנועדו לבצע ניתוח בתוך גוף אנושי, יש צורך בבקרת תנועה מדויקת במידה רבה מאוד. בתוך כל מניפולטור כזה יש מנועי סרוו למתח ישר המתוכננים ומיוצרים על ידי חברת maxon. על פי דבריו של מייק פרינדיוויל [Mike Prindiville], מנהל, חטיבת הנדסת ייצור בחברת Intuitive Surgical, “אמנם יש אפשרויות רבות הזמינות בשוק, אך מנועי maxon עומדים באופן קבוע בדרישות הביצועים והאיכות, והם מהווים שותפים רציניים בהצלחה של המוצר שלנו. ”מנועי maxon מספקים את הכניסות והיציאות למערכת da Vinci S HD. באמצעות סדרה של בקרות משוב, המנועים והמקודדים מקבלים אותות כניסה מהמנתח, עוברים תרגום בזמן אמת דרך המערכת האלקטרונית שבעמדה, ומספקים אותות יציאה למנועים שבמניפולטורים. אלו בתורם מפעילים כוחות בחזרה, דרך רכיבי האלקטרוניקה שבעמדה, אל ידי המנתח.
המהנדסים של חברת Intuitive Surgical תכננו עם יותר משלושים מנועי maxon, ואלו כוללים את מנועי RE 25 שחלקם עם משוב של מקודד וחלקם בלי משוב של מקודד, את מנועי RE 13 מ”מ המצוידים בתמסורת gearhead מסדרת GP 13 ובמקודדים מגנטיים של 13 מ”מ, וכן את המנועים בסדרה RE 35 עם מקודדים אופטיים.
מנועי maxon מתוכננים באופן כזה שבסטטורים שלהם יש מגנטים קבועים המכונים גם SUPER MAGNET או עפרות נדירות, וכן משולב בהם מבנה של רוטור ללא ברזל, בכך נמנעת עצירות (Cogging) מגנטית. בייחוד בפעולות ניתוח שנערכות במהירויות איטיות, עובדה זו נחשבת ליתרון משמעותי בהשוואה למנועים שמתוכננים באופן רגיל. כמו כן, המנועים מציעים צפיפות הספק טובה וסיבוב חלק, שתי תכונות חשובות שקיימות ביישומים של חברת Intuitive Surgical.
המנועים המשמשים בעגלה שבצד המנתח נקראים masters (מנועי השליטה) כדי להדגיש את התפקיד הכפול שלהם. למנועי ה-slave (המנועים בצד הנשלט) או מנועי המניפולטורים, יש צורך באותו דיוק, אך הם צריכים להיות מסוגלים להסתובב לאחור כאשר מנתח עוזר מעביר את יחידות הקצה (end effectors) למקומם. ובנוסף, למנועים יש גם היסטרזיס נמוך בקצה המכשור הרפואי.

- איור 8. מנוע RE 25 למתח ישר של maxon קוטר 25 מ”מ, מברשות גרפיט, 20 וואט. מנוע מתח ישר עם רוטור ללא ברזל של maxon

- איור 9. מכלול הינע בקוטר 13 מ”מ (מנוע RE 13, תמסורת פלנטארית GP 13, מקודד MR)

מסקנות
המערכת הכירורגית da Vinci S HD היא הטכנולוגיה היחידה מבחינה מסחרית שיכולה לספק למנתח את הבקרה האינטואיטיבית, טווח התנועה, יכולת המניפולציה ברקמות עדינות ויכולת הצגה בתלת ממד, אופייניים לניתוח פתוח, שעה שבו בזמן היא מאפשרת למנתח לעבוד דרך פתחים קטנים של ניתוח פולשני, במידה המזערית ביותר. זמינותם של מנועים ורכיבים אחרים שמתוכננים ומיוצרים בעזרת הטכנולוגיות האחרונות המתקדמות ביותר, מאפשרת למערכות כאלו לחדור אל השוק.
המערכת הכירורגית של da Vinci S HD מבוססת על טכנולוגיה כירורגית רובוטית בסיסית שפותחה במכון SRI (שקודם לכן נודע בשם מכון המחקר של סטנפורד (Stanford Research Institute). חברת Intuitive Surgical יצרה בשלב מאוחר יותר מערכת קשרים עם IBM, עם המכון לטכנולוגיה במסאסצ’וסאסט [MIT] ועם חברת Heartport במטרה להמשיך ולפתח את מערכות da Vinci S HD. מנהל התרופות והמזון [ה-FDA] אישר לשימוש את המערכת בניתוחים של הבטן, כגון ניתוחים להוצאת כיס המרה וניתוחים במעי הגס, עבור ניתוחי חזה למעט ניתוחי לב, ועבור ניתוחים של בלוטת הערמונית. המערכת da Vinci S HD משמשת כבר עתה באירופה לפרוצדורות של מעקפי לב.
לדבריו של מייק פרינדיוויל, מנהל, חטיבת הנדסה ליצור בחברת Intuitive Surgical, “בכל יום נתון אנו סומכים על יותר מ- 10,000 מנועי maxon שיפיצו את ערכם של המטופל, המנתח ובית החולים בכל רחבי העולם. מנועי maxon הוכיחו עצמם בכל הנוגע לאמינות, חיכוך נמוך ואורך חיים ארוך. כל מערכת da Vinci S HD נבחנת לבדיקת התכונות הקריטיות לביצועים, בהם נכלל חיכוך, חופש מכני (backlash) ופרופילי תאימות, וכן, טווח רחב של ניטור משובי חיישנים.”
