



Rob Steves, B.A.Sc., M.Eng.
President, Zaber Technologies Inc.
תמצית
לאחר שקבעתם את דרישות יישום התנועה הליניארית שלכם, כיצד תוכלו לאפיין מוצר תנועה ליניארית כדי להבטיח שהוא ממלא את צורכי היישום שלכם? מפרטי היצרנים הם לעתים קרובות מעורפלים ו/או לא שלמים. הדרך היחידה היא לבדוק את המוצר בעצמכם. אולם, לרוב לא ניתן לבדוק פשוט מוצר ביישום הסופי בשלב כה מוקדם בתהליך התכנון. מאמר זה יתאר שורת בדיקות שניתן לבצע על-ידי המשתמש הממוצע בעל ניסיון מועט וללא מכשירי מדידה מתוחכמים כדי לקבוע במהירות את מאפייני הביצועים החשובים ביותר של מערכות תנועה ליניארית.
כיצד למדוד את מאפייני הביצועים של התקן תנועה ליניארית
לכל עצם במרחב יש שש דרגות חופש: תנועה ליניארית לאורך צירי ה-Y,X ו-Z, וסיבוב מסביב לצירים אלה. עיין במערכת תנועה ליניארית טיפוסית, במקרה זה מגלש ליניארי T-LSR75D של Zaber. בהתייחס לאיור 1, נגדיר מערכת צירים כדלקמן:
X- ציר אופקי מקביל לציר התנועה
Y-ציר אופקי ניצב לציר התנועה
Z-ציר אנכי ניצב לצירים X ו-Y
Roll- (גלגול) סיבוב מסביב לציר X
Pitch- (עילרוד) סיבוב מסביב לציר Y
Yaw-(סיבסוב) סיבוב מסביב לציר Z
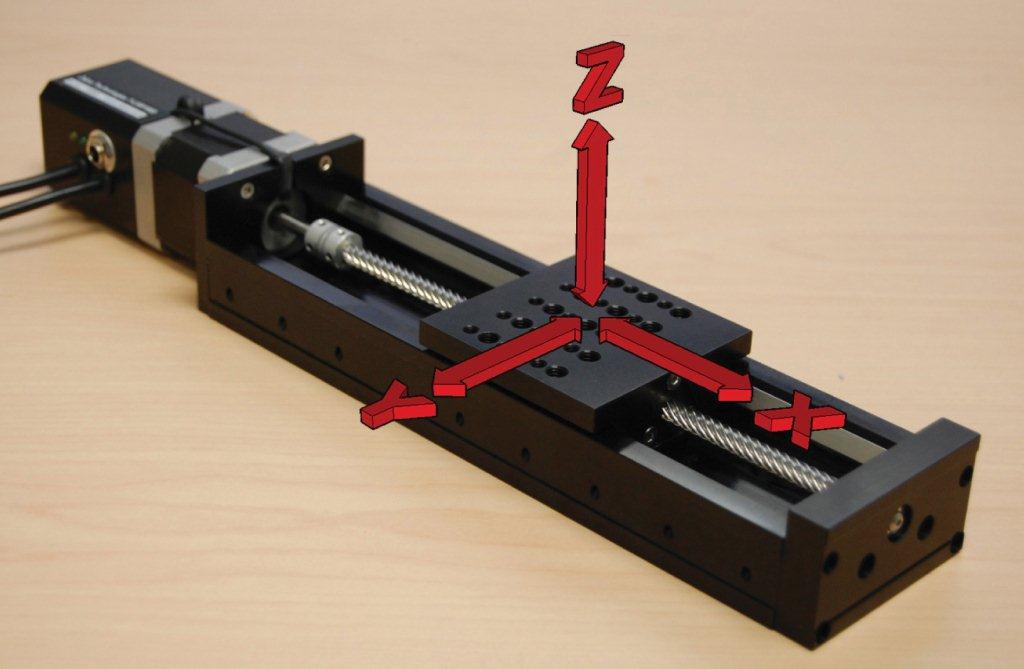
איור 1 הגדרת מערכת צירים

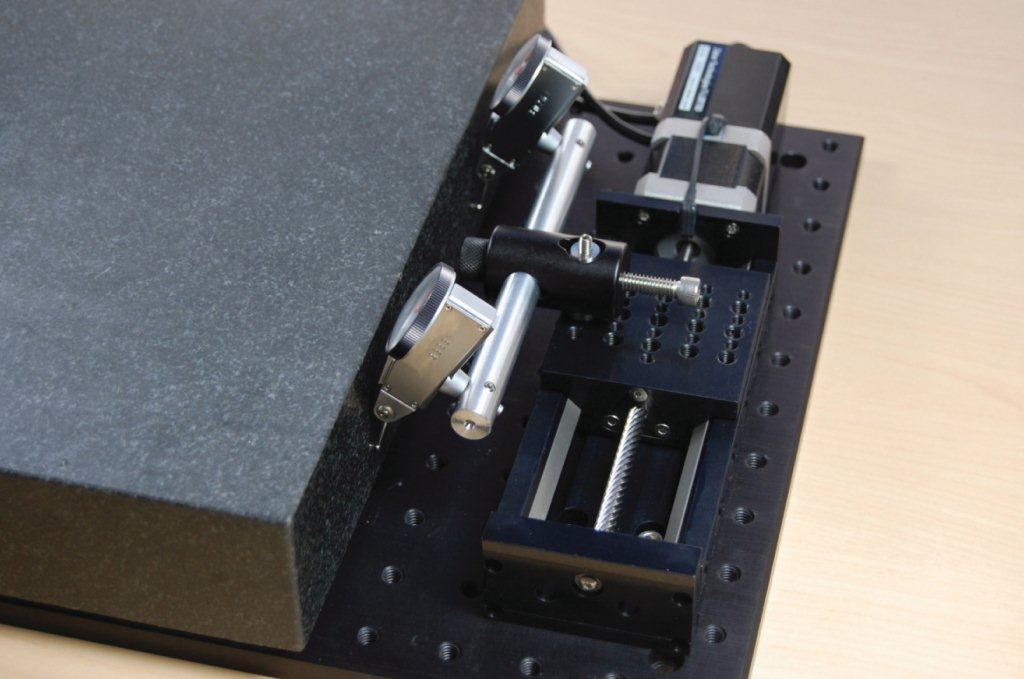
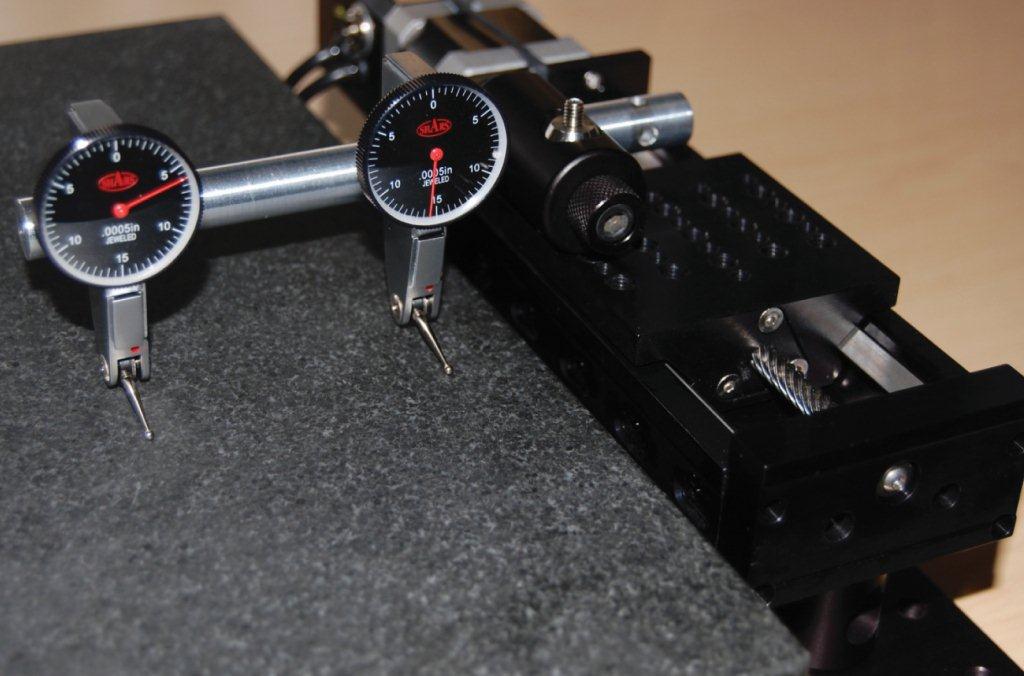
איור 2 הפריט הנבדק וציוד הבדיקה
המטרה של התקן בקרת תנועה בציר יחיד הוא להגדיר 5 דרגות חופש תוך שמירה מדויקת על תנועה בשישית. במקרה של המגלש הליניארי המתואר, כל שלוש דרגות החופש הסיבוביות הן מאולצות, כמו גם שתי דרגות חופש ליניאריות. התנועה בממד ה-X מבוקרת.
כל מי שרכש מוצר בעל תנועה ליניארית יזהה את המפרטים המוזכרים לרוב:
טווח
מהירות
יכולת עומס
שגיאת מצב (דיוק)
הדירות
פיגור בתגובה (backlash)
רזולוציה
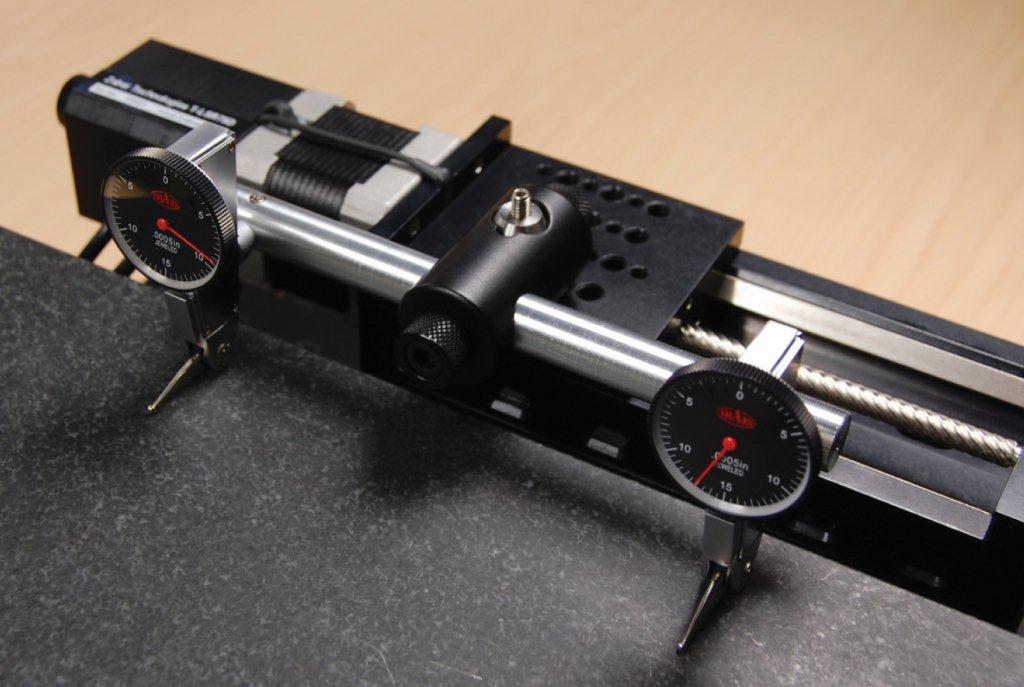
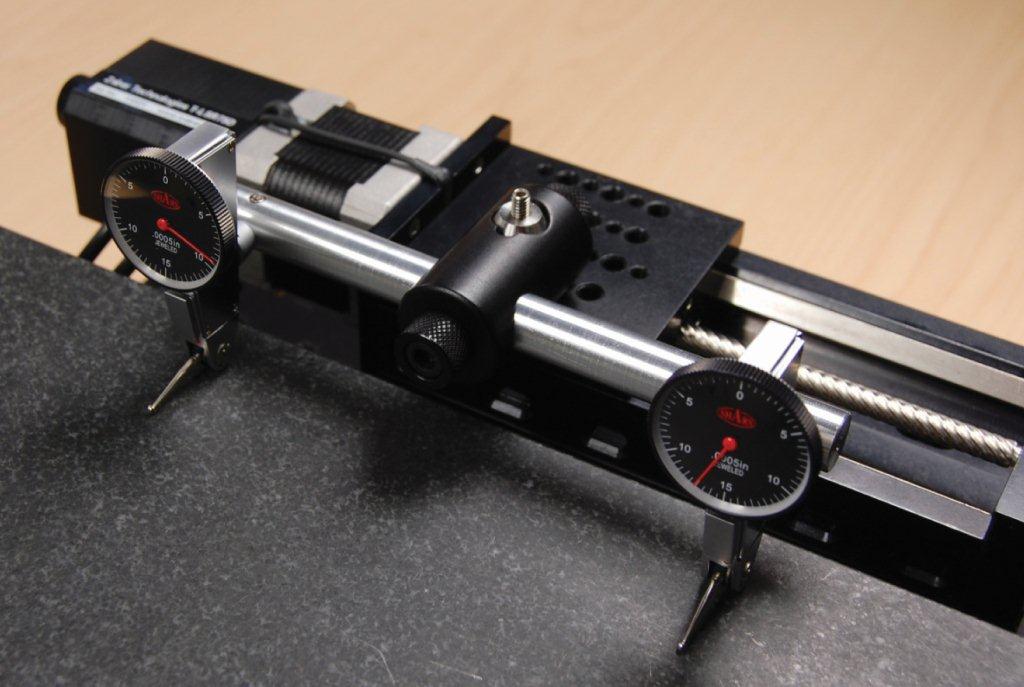
איור 3 התקנה למדידת שגיאת ה-Y ושגיאת הסבסוב
איור 3 התקנה למדידת שגיאת ה-Y ושגיאת הסבסוב
אניח שהקורא מכיר את הנ”ל, לכן לא אגדיר אותם כאן. שים לב שכל אחד ממפרטים אלה מתאר התנהגות בממד X בלבד. אולי זה לא ברור, אבל יש להבין שמכלול מפרטים דומה קיים עבור כל אחת מ-6 דרגות החופש. לא משנה איזו דרגת חופש מאולצת. מה שניתן למדוד בדרגת חופש אחת ניתן למדוד גם באחרת. במקרים מסוימים, ערכי המפרטים המתאימים הם ברורים. לדוגמה, טווח, מהירות ורזולוציה בכל ממד מאולץ חייבים להיות 0. במקרים אחרים, המפרט עשוי להיות מוכר תחת שם אחר. לדוגמה, “ריצה החוצה (run-out) אופקית” ו”ריצה-החוצה אנכית” הם מפרטים מוכרים המייצגים פשוט את שגיאת המצב בממדי Y ו-Z בהתאמה. מפרטים אחרים הם די מעורפלים כך שלא זכו לשמות תקניים. לדוגמה, לא נדיר למצוא ערכים הנקובים עבור שגיאת המצב בממדי הגלגול, העילרוד והסיבסוב, אולם נראה שכל יצרן יכנה אותם בשמות שונים. ואילו מפרטים אחרים אינם מוזכרים כלל. לא סביר שתראו את ההדירות או הפיגור בתגובה נקובים עבור כל דבר מלבד ציר התנועה, אם כי מפרטים אלה קיימים בוודאות בדרגות חופש אחרות.
בעוד מפרטים אחדים מוזכרים לעתים רחוקות, הערכים שלהם נדרשים לעתים קרובות על-ידי המשתמש. לעתים הדרך היחידה להשיג מפרטים אלה היא לבדוק את ההתקן בעצמו.
איור 4 הכינון ןלמדידת שגיאת העילרוד
איור 5 כינון למדידת שגיאת ה-Z ושגיאת הגלגול

איור 6 כינון למדידת שגיאת X.
ציוד בדיקה
הפריט הנבדק וציוד בדיקה טיפוסי מסוים מוצגים באיור 2. בצד שמאל למעלה נמצא לוח הרכבה אופטי (לוח אלומיניום מצופה בעל חורים מסונפים במרווחים קבועים). בצד ימין למעלה נמצא לוח משטח עשוי גרניט. כיום ניתן להשיג דיוק מפתיע בלוח משטח תוך עלות כספית מזערית. ניתן לקבל לוח משטח של המאושר כשטוח בגבולות ”0.0001 בעלות של כ. בתחתית הצילום שני מחווני חוגה בעלי שנתות של ”0.0005 וחומרה מסוימת לשם התקנתם בתצורות שונות. אתם תראו ציוד אחר נפוץ בצילומים הנוספים, אולם כולם הם שינויים על אותו נושא.
מדידת מהירות
בד”כ הציר בעל-העניין היחיד בהקשר למהירות הוא ציר ה-X (ציר התנועה). קיימת תמיד תנועה מסוימת בדרגות חופש אחרות, אותן אנחנו נמדוד בקרוב, אולם לרוב קיים עניין רק בשגיאת המצב ולא במהירות. לאורך ציר התנועה, ישנם מפרטים אחדים קשורים למהירות בהם המשתמש עשוי להתעניין. אלה הם המהירות המזערית, רזולוציית המהירות, שגיאת המהירות (דיוק) והמהירות המרבית. באמצעות מערכת בקרה דיגיטלית ניתן למדוד רק מהירויות דיסקרטיות אחדות. המהירות המזערית היא לרוב זהה לרזולוציית המהירות ואלה מוגדרות מראש בד”כ על-ידי חומרת הבקרה וניתנות לקביעה על-ידי התייחסות פשוטה להוראת ה”קביעת מהירות” או שוות-ערך שאמורה להתקיים עבור כל מערכת תנועה.
שגיאת המהירות ניתנת לקביעה בקלות יחסית בעזרת שעון-עצר רגיל. פשוט קבעו את התאוצה ל-0, קבעו את המהירות לערך נמוך, ובצעו הוראת תנועה המחושבת לערוך בדיוק 1000 שניות לשם השלמתה. תוך שימוש בשעון-עצר, אף בהתחשב בשגיאת-אנוש, ניתן להשיג בנקל דיוק תזמון של שנייה, כך שעבור תנועה של 1000 שניות תהיו מסוגלים למדוד את המהירות בדיוק של ±0.1%. אם דרוש דיוק גדול יותר, אפשר לנסות לבצע תנועה העורכת 1000 שניות להשלמתה, ולהשיג בכך דיוק של ±0.01% במדידת המהירות. אם יש לרשותך כל היום (ממש) אתה יכול לנסות 100000 שניות כדי להשיג דיוק של ±0.001%. זאת בהנחה שיש ברשותכם שעון-עצר בעל דיוק גדול מ-1 שנייה ביום. אם התקן התנועה מבוקר על-ידי מחשב, כפי שקורה עם פריט הבדיקה שלנו, מדידת המהירות היא הרבה יותר קלה. ניתן לכתוב תסריט בדיקה אשר יבצע מדידה, ימדוד את הזמן הדרוש לכך ויחשב ויציג את המהירות האמיתית ואת שגיאת המהירות. רשמו רק לפניכם שמערכות הפעלה הן לא- דטרמיניסטיות והן עשויות לא להיות מסוגלות למדוד זמן השלמה יותר מדויק מאשר אדם עם שעון-עצר, בתלות בתהליכים הרצים על המכונה.
המהירות המרבית ניתנת לקביעה על-ידי ניסוי וטעייה, אך זכרו שהיא תהיה תלויה בעומס.
איור 7 כינון למדידת מקבילות
מדידת קיבולת העומס
העומס המופעל על התקן תנועה ליניארית יכול להיות בצורת כוחות הפועלים לאורך צירי ה-Y,X ו-Z, או מומנטים סביב צירים אלה. לדוגמה, משקל ממורכז המותקן על היחידה מפעיל כוח רק בממד ה-Z. אם המשקל איננו ממורכז הוא מפעיל הן כוח בממד ה-Z והן מומנט מסביב לציר X או Y (או שניהם). כוחות ומומנטים אלה ישפיעו הן על אורך החיים של ההתקן והן על יכולת התנועה שלו בכלל. קיימים שני מפרטי עומס המצוטטים לרוב. אלה הם העומס המרבי, מעליו המגלש ייכבה, והעומס המומלץ, מעליו אורך החיים של המגלש עלול לקטון מתחת לתקופת האחריות. לעתים קרובות, רק העומס המומלץ מצוטט, מאחר שהיצרנים אינם ששים לעודד משתמשים לקדם את ההתקנים שלהם לקראת פסילה מוקדמת. אולם, המשתמשים חייבים להיות ערים לכך שניתן לחרוג מהעומס המומלץ בצורה משמעותית אם הצמצום בזמן-החיים מתקבל על הדעת.
העומס המרבי תלוי לרוב במהירות. כדי למדוד אותו, ניתן להפעיל כוח או מומנט ידוע (או צירוף של שניהם, מאחר שקשה להפריד ביניהם) בעזרת הוספת משקלים קבועים ליחידה. אזי ניתן לשנות את המהירות כדי לקבוע את הערך המרבי האפשרי. בדיקה של משקלים שונים אחדים ושיבוץ ביניהם תספק גרף סביר של העומס המרבי כפי שהוא משתנה עם המהירות.
קביעת השפעת העומס על משך החיים איננה כה קלה כמו קביעת ההשפעה של העומס על המהירות. היא דורשת בדיקה מחזורית של התקנים אחדים עד להופעת כשל בעומסים שונים, דבר שאיננו לרוב מעשי מבחינת המשתמש הסופי. אולם, עבור היצרן, קורה לעתים קרובות שרכיבים פרטיים דוגמת מסבים ומסילות ניתנים להחלפה פשוט בבדיקות עוקבות, ובכך מקטינות משמעותית את עלות בדיקת זמן-החיים.
מדידת שגיאת המצב
כמצוין לעיל, שגיאת מצב היא בד”כ המפרט המדאיג ביותר מבחינת המשתמש. שגיאות מצב ניתנות למדידה בכל אחת מ-6 דרגות החופש. לעתים קרובות, ניתן להשתמש בכינון (setup) יחיד כדי למדוד שגיאת מצב בממד הליניארי והסיבובי.
שגיאת Y ושגיאת סבסוב
הכינון למדידת שגיאת הסבסוב משמש גם למדידת שגיאת ה-Y. ראה איור 3. לוח המשטח מגרניט מורכב במקביל למגלש הליניארי. שני מחווני החוגה מורכבים על היחידה כך שחיישני המגע שלהם נוגעים בעדינות בצד האנכי של לוח המשטח מגרניט. לוח המשטח מכוונן במקביל למגלש כך שימזער את שינוי בקריאות מדיד החוגה בתחום התנועה של המגלש. כדי למדוד רק סבסוב ללא מרכיב של גלגול, חשוב שנקודות המגע של החיישנים עם לוח המשטח יהיו מונחות באותו המישור כמו מסבי המגלש. תוך שמירה על הכינון, ניתן לראות שתנועות קטנות בכיווני Z ו-X לא ישפיעו על קריאות החוגה. גם לא שינויים קטנים בזווית העילרוד (pitch) או הגלגול (roll). אם כן ברור שזהו כינון טוב למדידת שגיאות מצבי ה-Y והסבסוב. במספר מקומות במהלך התנועה של המגלש ניתן לקבל קריאות משני מדידי החוגה. בכל מקום, ניתן לחשב את מצב ה-Y כממוצע של שתי קריאות החוגה, בעוד זווית הסבסוב (ברדיאנים) היא ההפרש בין שתי הקריאות מחולק במרחק בין החיישנים (5” במקרה שלנו). השינוי המרבי במצב ה-Y וזווית הסבסוב במהלך התחום המלא של התנועה נותן את שגיאת ה-Y ושגיאת הסבסוב בהתאמה. שגיאת ה-Y מכונה לרוב כ-run-out אופקי.
שגיאת העילרוד
הכינון למדידת שגיאת העילרוד מוצג באיור 4. הוא דומה לזה של מדידת שגיאת הסבסוב, אולם החיישנים של מדידי החוגה מונעים כנגד הקצה האופקי של לוח המשטח מגרניט ולא הקצה האנכי. שוב, חשוב שנקודות המגע עם לוח המשטח יונחו באותו המישור כמו מסבי המגלש הליניארי. כדי להשיג זאת, המגלש הועלה על עמודים מעל המעגל האופטי. ניתן לראות שתנועות קטנות ב-X או Y לא ישפיעו על קריאות החוגות. גם לא שינויים קטנים בזווית הסבסוב. שינויים במצב ה-Z ובזווית הגלגול ישפיעו על קריאות המדידים אולם שני המדידים יושפעו במידה שווה. מאחר שזווית העילרוד קשורה להפרש בין שתי הקריאות, המדידה שלה לא תושפע לרעה על-ידי שגיאת ה-Z או שגיאת הגלגול. זווית העילרוד (ברדיאנים) נתונה על-ידי ההפרש בין שתי הקריאות המחולק במרחק בין נקודות המגע (שוב 5”). השינוי בזווית העילרוד הנמדד במהלך כל התנועה נותן את שגיאת העילרוד. נוטים אולי להשתמש בכינון זה כדי למדוד גם את שגיאת ה-Z, אולם תהיה זו בחירה לא-מוצלחת מאחר שלא יהיה אפשר להבדיל את שגיאת ה-Z מרכיב שגיאת הגלגול אשר תימדד גם כן.
שגיאת ה-Z ושגיאת הגלגול
הכינון למדידת שגיאת הגלגול מוצג באיור 5. המגלש הליניארי ולוח המשטח מגרניט נשמרים באותם המצבים כמו במדידת העילרוד, אך כינון מדיד החוגה מסובב כך שנקודות המגע מונחות לאורך ציר ה-Y. ניתן לראות שתנועות קטנות ב-X ו-Y לא ישפיעו על קריאות החוגות. גם לא שינויים קטנים בזווית העילרוד או הסבסוב. לכן זהו כינון נכון למדידת שגיאת ה-Z ושגיאת הגלגול בתנאי שיש דרך להבחין ביניהן. מדידי החוגה נקבעים כך שנקודות המגע הן במרחק 2.5” ממרכז היחידה. אולי זה לא ברור מיידית, אך חישוב גיאומטרי קטן יראה שמצב ה-Z נתון על-ידי הכפלת הקריאה הימנית ביותר וחיסור הקריאה השמאלית ביותר. זווית הגלגול נתונה על-ידי ההפרש בין שתי הקריאות מחולק במרחק בין החיישנים (”2.5 במקרה זה). השינוי במצב ה-Z וזווית הגלגול לאורך כל תחום התנועה נותן את שגיאת ה-Z ושגיאת הגלגול בהתאמה. שגיאת ה-Z מכונה לרוב run-out אנכי. קיימות שיטות פשוטות יותר למדידת שגיאת ה-Z אם זהו העניין היחיד שלכם, אולם אם אתם מודדים שגיאות מצב בכל דרגות החופש, מדידת שגיאת ה-Z ושגיאת הגלגול באותו הכינון היא נוחה.
שגיאת ה-X
שגיאת המצב לאורך ציר ה-X מכונה לרוב “דיוק”, אולם זו טעות מאחר שערך גדול יותר מראה על התקן פחות מדויק. מפרט זה ננקב כמעט תמיד על-ידי היצרן כך שהמשתמש איננו חייב לבדוק אותו. יש בכך ברכה מאחר שזהו המפרט הקשה ביותר למדידה ללא שימוש בציוד יקר. איור 6 מראה כינון טיפוסי למדידת שגיאת ה-X. מקודד ליניארי מורכב ומכוון במדויק מקביל לציר ה-X. רזולוציית המקודד חייבת להיות קטנה מזו של התקן בקרת התנועה שיש למדוד. במקרה זה משתמשים במדיד אורך Heidenhain MT1271. הוא בעל רזולוציה של 0.05µm. למגלש הליניארי הנדון בורג מוביל יחסית גס ולכן הרזולוציה שלו היא רק 1µm. רצוי שתחום התנועה של המדיד יהיה גדול יותר מאשר זה של התקן התנועה הנבדק, אולם אין בכך הכרח מאחר שאפשר לקבל מושג טוב על שגיאת המצב במהלך מרחק יחסית קצר. למדיד בתמונה טווח תנועה של 12 ממ’ בעוד למגלש הליניארי יש תחום של 75 ממ’.
הצופה החריף ישים לב שבכינון שבתמונה המדיד מודד רכיב קטן של שגיאת העילרוד והסבסוב בנוסף לשגיאת ה-X. אולם, בהתחשב בטווח הקצר בו נמדדת שגיאת ה-X, לא סביר שזוויות העילרוד והסבסוב ישנו משמעותית. במיוחד במערכות מבוקרות מנועי צעד שהן בלולאה פתוחה, ניתן לייחס את רוב שגיאת המצב לאורך ציר התנועה בחזרה למנוע עצמו. אם ההתקן שלך משתמש בבקר מיקרו-צעד, עליך לבחון את שגיאות המצב בשלושה תרחישים שונים:
1. תנועה במיקרו-צעדים יחידים לאורך לפחות 4 צעדים מלאים
2. תנועה בצעדים מלאים במשך לפחות סיבוב אחד מלא של המנוע
3. תנועה בסיבובים מלאים בכל טווח ההתקן (או המדיד שלך)
במערכות תנועה מבוססות על מנועי צעד דו-קוטביים, יהיו שגיאות מחזוריות החוזרות במחזורים של צעד אחד, 4 צעדים וסיבוב מלא אחד. בנוסף תהיה גם שגיאה הכרוכה בבורג המוליך. שגיאת המצב הכוללת במקום כלשהו בתוך טווח התנועה היא הסכום של רכיבי שגיאה אלה. לרוב מוצהרת רק השגיאה הכוללת, אך רצוי לקבל מושג על כמות השגיאה הנתרמת על-ידי כל מקור מאחר וחלק מהשגיאות ניתנות לביטול, לדוגמה על-ידי תנועה בצעדים מלאים, או סיבובים מלאים של המנוע. הבנת התרומה של כל מקור שגיאה מאפשרת להעריך במדויק את המידה בה תנועה בצעדים מלאים, או סיבובים מלאים, עשויה לשפר את הביצועים.
מדידת ההדירות
מפרטי ההדירות, אם הם מוזכרים כלל, הם נקובים רק עבור ציר התנועה. אולם לכל דרגת חופש בעלת שגיאת מצב יש הדירות. על-ידי ביצוע בדיקות מדידת שגיאת המצב לעתים קרובות עבור אותו כינון, ניתן לקבוע את הדירות שגיאות ה-X, Y, Z, עילרוד,סבסוב וגלגול. בהתאם ליישום, ייתכן שדיוק גבוה של מערכת תנועה ליניארית איננו חשוב. לעתים דרוש שתהיה רק הדירה. באופן טיפוסי, ההדירות של מערכות תנועה ליניארית (במיוחד כאלה המבוססות על מנועי צעד) היא הרבה יותר טובה מאשר הדיוק שלהן.
מדידת הנסיגה (backlash)
כמו ההדירות, הנסיגה נקובה רק עבור ציר התנועה, אולם לכל דרגת חופש בעלת שגיאת מצב עשויה להיות נסיגה. במילים אחרות, התקרבות למקום מכיוון אחד עשויה לגרום למדידת שגיאה שונה מאשר התקרבות לאותו מקום מכיוון אחר. ההפרש בין שתי מדידות השגיאה הוא הנסיגה שהיא בד”כ קבועה יחסית בכל טווח התנועה. נסיגה יכולה להתפרש גם כהדירות דו-כיוונית והיא ניתנת למדידה, כפי שאפשר לצפות, פשוט יל-ידי התקרבות למקום מכל כיוון והשואה בין התוצאות.
מדידת המקבילות
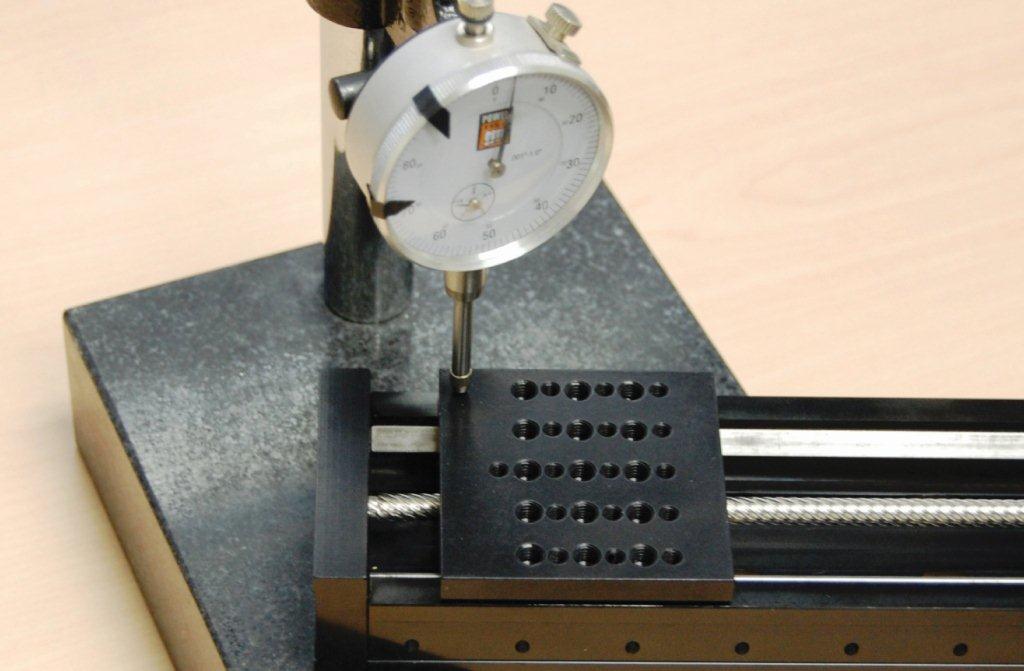
כל המפרטים שנזכרו לעיל הם מפרטים דינמיים. כלומר, הם מתייחסים לתנועת ההתקן ולא לגיאומטריה הסטטית שלו. כדי למדוד מפרט דינמי יש להניע את ההתקן. מקבילות היא אחד המפרטים הסטטיים המעטים שהמשתמש עשוי להתעניין בו. בעוד ששגיאות העילרוד, הסבסוב והגלגול הם מדידות של השינוי במצב הזוויתי בשעה שהמגלש נע בטווח התנועה שלו, המקבילות היא מדידה של קו הבסיס ממנו שינויים אלה קורים. איור 7 מציג כינון טיפוסי למדידת מקבילות. מדיד גובה המורכב על לוח משטח הגרניט משמש למדידת גובה היחידה במקומות שונים. המקבילות היא פשוט השינוי בגובה. אם רוצים, ניתן להיות יותר ספציפיים ולציין מקבילות בממד ה-X (השינוי בגובה מהחזית אל הגב) ומקבילות בממד ה-Y (השינוי בגובה מצד לצד) כיחידות נפרדות, אך לרוב רק ערך אחד נקוב. המקבילות נתינת להמרה לזווית ברדיאנים פשוט על-ידי חלוקתו בממד המתאים (אורך או רוחב) של משטח היחידה.
סיכום
בעזרת השימוש בציוד לא יקר יחסית, ניתן למדוד מאפייני ביצועים חשובים אחדים של התקן תנועה ליניארית. טכניקות המדידה הללו שימושיות הן לבקרת המפרטים הנקובים על-ידי היצרנים והן לקביעת מפרטים שלא צוינו.
Rob Steves, B.A.Sc., M.Eng. הוא מהנדס תכנון אלקטרו-מכני ונשיא ה-.Zaber Technologies, Inc המובילה בתכנון וייצור מפעילים (actuators) ליניאריים מבוססים על מנועי-צעד, מגלשים (slides) ליניאריים ומוצרי בקרת תנועה אחרים המשמשים באופטיקה, אוטומציה תעשייתית, ביו-רפואה ויישומים אחרים רבים.
הכתבה נמסרה באדיבות חברת להט טכנולוגיות.





