רמי סימני, Elmo Motion Control
ביישומי בקרת תנועה מתקדמים, ישנו לעיתים צורך לשינוי פרופיל התנועה בזמן אמת ע"מ לבצע עדכון מיקום היעד הסופי של הפרופיל. בדרך כלל, הצורך בשינוי מיקום היעד הסופי הינו תוצאה של שגיאת מיקום שאותרה וחושבה על ידי מערכת עיבוד התמונה.
היעד, אם כן, הוא להגדיר את התהליך באופן כזה, שבסופו של תהליך, התוצאה של "תנועה מהירה אל עבר המטרה הסופית – לכידת תמונה – חישוב התיקון – ושינוי פרופיל התנועה לעבר המיקום החדש", תתקבל תוך כדי תנועה, ובמהירות המרבית האפשרית.
ביצוע מהיר, חלק ויציב של תיקוני שגיאות מיקום תוך כדי תנועה, יאפשר עבודת מערכת אופטימאלית לקבלת תפוקה מקסימאלית מהמכונה.
מכונות הרמה והשמה (pick&place) אוטומטיות מתקדמות – שבהן יש לערוך תיקון של קורדינטות במישור (X/Y) וכן תיקון היסט הרכיב המורם על פי המדידה שבוצעה על ידי מערכת עיבוד תמונה, או יישומי חיווט פדים בתעשיית המוליכים למחצה (wire bonding), שבהן נדרש לתקן את המטרה הסופית על פי מידע המגיע ממערכת עיבוד התמונה – יכולים להיות דוגמה טובה לשימוש אפליקטיבי בפונקציונאליות ייחודית זו.
פתרון ה-™Flying Vision של Elmo הינו פתרון ייחודי עבור עדכוני מיקום מכל הסוגים, שנעשים תוך כדי תנועה מבלי להקטין את מהירות התהליך, המבוצעים בדייקנות וביציבות מרביים. במקרים רבים, בעזרת פתרון
ה-™Flying Vision נמדד שיפור מהירות משמעותי בתהליך שהתבטא ביותר מ-30%.
פתרון ה-™Flying Vision הינו פתרון עבור כל עבודת מכונה, שבמסגרת התהליך שלה יש צורך לערוך תיקוני מיקום, תוך כדי תנועה במהירות גבוהה, ובתנועות יציבות וחלקות, למשל, קידוח מעגלים מודפסים, מבדק גששים אוטומטי (flying probe), "חיתוך לפי אורך" (Cut to Length) וכיו"ב.
תיאור הפתרון
בפתרון, כל מכונה מניעה בו זמנית ובצורה מסונכרנת שתי מערכות גשרים (Gantry), על כל גשר מותקנות חמש מערכות בקרת הינע סרוו מתקדמות ממשפחת ה-Gold של החברה.
X1, X2 – שני צירים מקבילים הפועלים כמערכת Master-Slave בארכיטקטורה לבקרת גשר מקבילי מבוסס כניסות מרובות ויציאות מרובות (MIMO)
Y – ציר המאפשר תנועה על הגשר המקשר בין שני צירים המקבילים הפועל כציר דו ממדי מסונכרן
Z – ציר המאפשר תנועה אנכית
Theta – הינע סרוו מתקדם זעיר מבית Elmo עבור ציר סיבובי המשמש לתיקון היסט הרכיב.
כל בקרי הינע הסרוו שבמערכת נשלטים ע"י בקר רשת מרכזי יחיד לריבוי צירים (Gold Maestro), דרך רשת EtherCAT דטרמיניסטית מהירה.
מערכת צילום ועיבוד תמונה ממוחשבת נמצאת במיקום קבוע במכונה, כל מחזור של מסלול תנועה להרמה ולהשמה של רכיב SMT חייב לעבור דרך מיקום המצלמה. תנועה זו חייבת להמשיך ולהתקיים במהירות ובדיוק הגבוהים ביותר האפשריים. אחד המרכיבים העיקריים בפתרון זה הינו המעבר דרך מיקום המצלמה ממיקומים שונים של הרמה והשמה, במהירות גבוהה ובתנועה חלקה ללא עצירה, תוך כדי לכידת התמונה ע"י המצלמה.
כאשר רכיב בטכנולוגיית SMT עובר מעל מיקום המצלמה, שתי פונקציות OC (יציאת פולסים מבוססי מיקום) מופעלות. פונקציות אלו משמשות להפעלת המצלמה לשם לכידת תמונת הרכיב.
פונקצית ה-OC הראשונה משמשת לצורך הפעלת נוריות LED להארת הרכיב ע"י הבזק אור בעל עוצמה חזקה לפני פעולת הצילום.
פונקצית ה-OC השנייה משמשת לצורך הפעלת המצלמה לצילום הזווית הסיבובית וההיסט המישורי של רכיב SMT.
נתוני התמונה עוברים עיבוד באמצעות מחשב המחובר באופן ישיר לרשת ה-EtherCAT, והם מפיקים את הקואורדינטות הסופיות של מיקום השמת הרכיב (קורדינאטות סיבוביות Ө ואת היסטי X, שלהם במישור הדו מימדי), ביחס לצירים המתאימים במערכת, לפני ההצבה הסופית של הרכיב. המחשב המארח (Host) יכול לשלוח את הקואורדינטות הסופיות למערכת Gold-Maestro במהלך התנועה דרך רשת EtherNET או EtherCAT, כאשר לרשותו עומד זמן רב יחסית לשם עיבוד הנתונים ושליחת קואורדינטות ההיסט הסופיות
ל-Gold-Maestro – מרגע צילום התמונה ועד למס' מילי שניות לפני הגעתו לעמדת ההצבה הסופית.
הפתרון של Elmo
הפתרון של אלמו לבקרת מערכות גאנטרי בטופולוגית בקרה מבוזרת, מאפשר הורדת עומס התקשורת ברשת ה-Fieldbus, זאת על ידי שימוש בערוץ תקשורת טורי ייעודי, חסין ומהיר בין המגברים. מגבר אחד מוגדר באופן לוגי כ-Master של הגאנטרי, והוא מאחזר את כל המידע הנדרש מציר ה-Slave, ומבקר את המערכת ע"י בקרת MIMO. סוג זה של מבנה מבטל את הצורך בכך שמערכת Gold-Maestro תטפל באלגוריתמי בקרת MIMO של הגשר, ולכן ברמת המערכת, ה-Gold-Maestro מתייחס להינעי הגאנטרי X1 ו-X2 כאל הינע יחיד של ציר X. "ציר יחיד" זה מחובר לציר Y הנוסף, על מנת לבצע את התנועות הדו ממדיות המסונכרנות של המכונה בצירים X ו-Y.
חברת Elmo מציעה שני מנגנונים אפשריים עבור פתרון מסוג זה. כפי שצוין כבר, החלק החשוב בפתרון זה, הוא הביצוע של תנועות X ו-Y בדרגת סנכרון גבוהה, תוך מעבר דרך מיקום המצלמה במהירות ודיוק מירביים, עם פרופיל תנועה חלק במיקום, במהירות, בכיוון והן בתאוצה ובתאוטה.
הפתרון הראשון הוא להשתמש בתנועת Spline דו ממדית. חברת Elmo תומכת בכמה צורות פעולה של יצירת מסלולים בהינע Spline. אחת השיטות, שהיא גם המתאימה ביותר לפתרון זה, מאפשרת למשתמש להגדיר מראש טבלה של מיקומים המוגבלים במהירות הווקטורית, בקצבי התאוצה והתאוטה ובנתירה (jerk). השימוש בהינעי Spline דו ממדיים ב-X וב-Y המוגדרים מראש, מבטיח את המעבר דרך כל המיקומים המוגדרים במהירות המרבית ובדיוק הגבוה ביותר האפשרי.
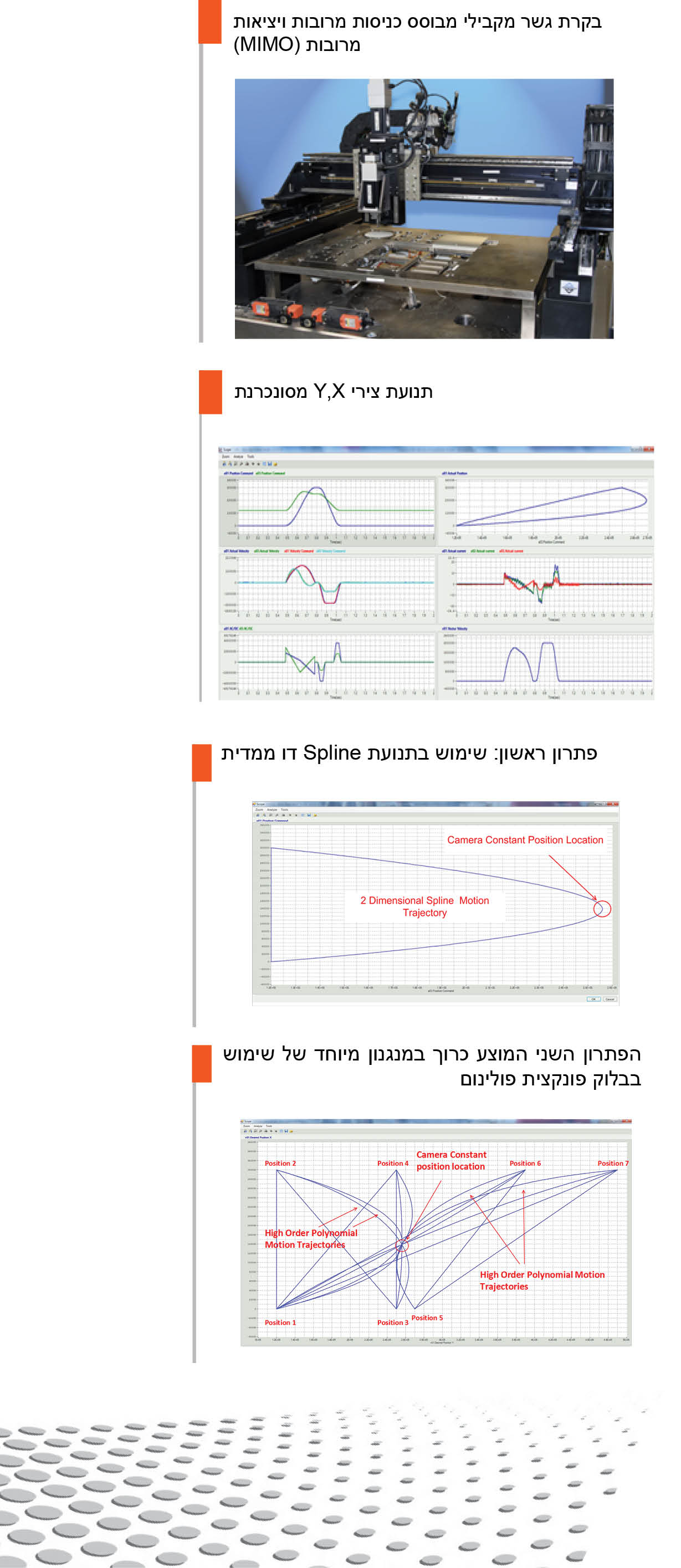
הפתרון השני המוצע כרוך במנגנון מיוחד בו יש שימוש בחישוב מסלול פולינום מסדר גבוה (Polynomial Function Block). בפתרון זה המשתמש יכול להגדיר שתי נקודות
מיקום (Auxiliary point ו-End point)
כחלק ממסלול התנועה הדו מימדי הנדרש. ה-Profiler של מערכת Gold-Maestro יעבור דרך מיקום
ה-Auxiliary (מיקום המצלמה הקבוע) עד לנקודת ה-End Point (נקודת השמת
ה-SMT) במסלול תנועת פולינום מסדר גבוה. יכולת מתקדמת זו מאפשרת למשתמש ליצור מסלולי תנועה אשר מאפשרים להגיע למיקום הסופי דרך מיקום קבוע ומוגדר מראש, במהירות ובתנועה חלקה, עם תאוצה/תאוטה חלקות ונתירה מוגבלת.
באמצעות שימוש בפונקציית Speed Override, בקר ה-Gold-Maestro יכול לשלוט על המהירות של מסלול התנועה בזמן התנועה. פונקציה זו מאפשרת להשיג מהירות אופטימאלית עד לקבלת קורדינאטות התיקון הסופיות מהמצלמה בכל מחזור של הרמה והשמה.
תכונה נוספת הגלומה במערכת
Gold-Maestro היא האפשרות להשתמש בתנועות מורכבות (superimposed). מערכת Gold-Maestro מאפשרת "קישור" של ציר וירטואלי לכל ציר תנועה ממשי במערכת. סיכום המיקומים המורכבים של המסלולים בצירים הממשיים והווירטואליים, יגדיר את המיקום הסופי של מסלול הציר הממשי. יכולת זו מאפשרת להוסיף תוך כדי תנועה מיקום היסט לכל ציר במערכת, במהלך התנועה, תוך כדי ביצוע מסלול התנועה המקורי שמוגדר על ידי בלוק פונקצית התנועה, מבלי שיהיה צורך לשנות את זמן התנועה הכולל.
שתי פונקציות OC המוגדרות מראש משמשות לצורך הפעלת ההבזק ותחילת הפעולה של המצלמה כפונקציה של מיקום מסלול התנועה. פונקציונליות זו מאפשרת יצירת סנכרון ברמה גבוהה בין פעולת המצלמה והתנועה אשר נוצרות על ידי מערכת Gold-Maestro.
כעת ברור מדוע הפתרון ™Flying Vision של Elmo הוא הפתרון האולטימטיבי
עבור תהליכים שבהם נדרש לבצע במהירות גבוהה, ובתנועות יציבות וחלקות, תיקוני מיקום, שנעשים תוך כדי פעולה, בדייקנות וביציבות, ומשפרים משמעותית את מהירות התהליך ותפוקת המכונה.