



יישומים ניידים מוזני-סוללה יכולים לפעול עתה במשך זמן רב יותר לטעינה תוך שימוש בטכנולוגיית מקודד חדשה.
עד לאחרונה, רובוטים עצמאיים וטיסנים אוויריים היוו פחות או יותר השמירה היחידה של חברות גדולות ורשויות ממשלתיות כגון הצבא. עתה, אולם, הטכנולוגיות הפכו ליותר נגישות ומגוון רחב של יישומים מסחריים זולים צצים בשוק. שימושים אפשריים עבור טיסנים אזרחיים כוללים בדיקת יבולים, בחינה של כבלי כוח, ניטור הסביבה או לימוד חיי הטבע. החזאים מציעים ששווקים אלה עשויים לצמוח למספר מיליארדי דולרים בתוך העשור הבא. על הקרקע, רובוטים לא יקרים, גמישים, ניידים הם בעלי כוח משיכה עבור מגוון תפקידים כגון אוטומציה של מחסנים ויישומי חקלאות עצמאיים. יתר על כן, התקנים רובוטיים קטנים כבר מספקים סיוע בתפקידים ביתיים כגון שאיבת אבק וכיסוח דשא.
בעתיד, רובוטים חכמים יותר בעלי יכולות תנועה והצבה יותר מתוחכמות יכלו לספק סיוע נוסף בבית או בסביבה משרדית, כולל מטלות ניקיון נוספות, אבטחה, פריון או אספקת טובים.כך שלאחר שנים של דמיון של מדע דמיוני, יישומי הרובוטיקה של כיום הופכים לניידים באמת. עם הניידות עולה הצורך בפעולה מוזנת-סוללה, וככל שהשווקים מתפתחים והמשתמשים הסופיים הופכים ליותר תובעניים, כל מיליאמפר-שעה של אנרגיית סוללה יהפוך ליותר יקר-ערך.
ניהול זהיר של מאזן הספק מוגבל חיוני כדי לאפשר לרובוט לבצע יותר עבודה ולפעול זמן רב יותר בכל טעינה מלאה. יתר על כן, בשעה שיעילות גדולה יותר ממזערת את בזבוז האנרגיה, המהנדסים יכולים לנצל את האפשרות של הגדרת סוללות יותר קטנות ויותר קלות, להשיג בכך שיפורים נוספים בתפעול והקטנת גודל היישום.הפלטפורמות הניידות והאוויריות המופיעות עתה כוללות מספר רב של מנועים חשמליים, לא רק להנעת גלגלים או רוטורים, אלא גם במנגנונים ומפעילים (actuators) שונים של הצבה הדורשים לעתים קרובות בקרת תנועה בצירים מרובים. צריכת הספק המנועים יכולה לנוע בין ואטים אחדים במנגנון הצבה קטן עד לעשרות ואטים או לעתים הרבה יותר עבור גרירה או הרמה. לכל מנוע יחידת נהיגה/בקרה מחוברת שגם מפזרת הספק משמעותי.
מזעור ההספק הנצרך על-ידי כל מערכת מנוע משחרר יותר אנרגיה של הסוללה עבור פעולה שימושית, והתוצאה המצטברת של מנועים מרובים עשויה לספק יתרון בעל-ערך בחיפוש אחר בניית רובוטים שיכולים להתקדם יותר על-פני סוללות קטנות יותר. בחירת מקודד, המשמש ללכוד את מידע ההצבה שהבקר זקוק לו כדי לבצע את אלגוריתם הבקרה הווקטורית של המנוע, יכולה להשפיע רבות על יעילות האנרגיה של המערכת. במערכות מרובות-מנועים, החסכונות באנרגיה שניתן להשיג על-ידי בחירה של מקודד יעיל עשויים להשפיע משמעותית על מאזן ההספק. בין טכנולוגיות המקודדים הקיימות כיום, מקודדים קיבוליים יכולים לא רק לשפר את היעילות אלא גם לאפשר אמינות גבוהה יותר, להקטין את התחזוקה, לצמצם את עלויות הפיתוח ולהקטין את הזמן לשיווק.
שיפור בקרי המנוע
כיום, סוגי המקודדים השימושיים ביותר הם מקודדים אופטיים ומקודדים מגנטיים. מקודד אופטי מכיל מקור-LED ושילוב חיישן אופטי המגלה את האור המועבר דרך או מוחזר מגלגל קידוד המורכב על ציר המנוע, כמתואר באיור 1. שני LEDs המוצבים בניצב מאפשרים גילוי הן של מהירות והן של כיוון המנוע. LED שלישי יכול לשמש לניטור סימון יחיד על-גבי גלגל הקידוד, המספק פולס כיוון למערכת בקרת המנוע. רזולוציית המקודד, במונחים של פולסים לסיבוב (pulses per revolution – ppr) תלויה במספר הסימונים המרווחים במדויק על פני גלגל הקידוד. מקודדים אופטיים יכולים להיות בעלי רזולוציה מאוד גבוהה, אך סובלים גם ממספר חולשות.
אלה כוללות פגיעות לאבק, שמן או אידוי, העשויים להצטבר על גלגל הקידוד ולגרום לקריאות חסרות או לא-נכונות. בנוסף, בהירות ה-LED תיחלש במרוצת הזמן ולבסוף תיעלם, תוך גרימת כשל שניתן לתקן רק על-ידי החלפת המקודד.באשר ליעילות האנרגיה, נכון שמקודדים אופטיים צורכים זרם יחסית גבוה, דבר הגובר במצבי רזולוציה גבוהה יותר ועם תבניות אות-מוצא מורכבות יותר. למעשה, צריכת הזרם יכולה לגדול פי שניים או יותר בין הרזולוציה הנמוכה ביותר לגבוהה ביותר. מקודדים אחדים יכולים לצרוך עד כדי 85 מילי-אמפר ברזולוציה הגבוהה ביותר. דבר זה עשוי לא להיראות חשוב בהשוואה להספק הנצרך על-ידי המנוע, אך ב-5 וולט ו-85 מילי-אמפר המקודד צורך 0.425 ואט. במערכת בעלת ארבעה מנועים, המקודד לבד אחראי ל-1.7 ואט. הקטנת צריכה זו באנרגיית הסוללה עשויה לאפשר ליישום להריץ מערכות אחרות כגון מצלמות, חיישנים או מפעילים קטנים המותקנים על המכשיר למשך פרק זמן די ארוך.
מקודדים מגנטיים מספקים חלופה שאינה דורשת קו ראייה ולכן הם אינם פגיעים לשגיאות בשל הזדהמות. בנוסף, מקודדים מגנטיים יכולים לפעול אף כאשר טבולים בנוזלים לא-מוליכים כגון שמן סיכה. מאידך, הרזולוציה והדיוק בהצבה הם אופיינית נמוכים יותר בהשוואה למקודדים אופטיים.
בהתאם לסוג המקודד המגנטי, הזרם המרבי יכול להיות מ-20 מילי-אמפר עד 160 מילי-אמפר או יותר. כחלופה תחרותית יותר לטכנולוגיה האופטית או המגנטית, מקודדים חדשים קיבוליים בעלי הצבה סיבובית מספקים חסכונות בצריכת ההספק עבור יישומים עשירי-מנוע כגון רובוטיקה ניידת. ניתן לכוונן סוג זה של מקודד ביתר קלות ודיוק כאשר המנוע מכוון תחילה, דבר העשוי לספק יותר חסכונות באנרגיה ויכול לאפשר מנועים יותר קטנים, יותר קלים, בעלי הספק יותר נמוך.
עקרונות המקודד הקיבולי
מקודדים קיבוליים משתמשים באותו העיקרון כמו מחוגה (caliper) דיגיטלית Vernier, הידועה כאמינה, יעילה לעלות ומדויקת. המקודדים הקיבוליים הדיגיטליים AMT של CUI מכילים גוף קבוע ומרכיב נע, כמתואר באיור 2. לכל אחד ממרכיבים אלה יש שתי תבניות של פסים או קוים המרכיבים יחד קבל משתנה המעוצב כזוג משדר/מקלט. כאשר המקודד מסתובב, תנועת המרכיב הצמוד לציר המנוע מאפננת את המוצא כדי ליצור אות יחיד אך ניתן לחיזוי. המקודד כולל ASIC המפרש אות זה ומשמש לחישוב מצב הציר וכיוון הסיבוב כדי ליצור את המוצאים הניצבים התקניים. בעזרת מעבד מותקן ה-ASIC ומיקרו-מעבד יכולים לפעול יחדיו כדי ליצור מוצאים מורכבים יותר כגון פולסי קומוטציה הדרושים עבור מנועי dc ללא מברשות (BLDC) או מוצאים טוריים במקודדים מוחלטים.עיקרון הפעולה הקיבולי מאפשר למקודד לשמור על דיוק בסביבות אבק או לכלוך, כגון במחסן, על רצפת המפעל, או בציוד המותקן חיצונית לבניין.בדומה לטכנולוגיה המגנטית, ניתן להטביע גם מקודדים קיבוליים בנוזלים לא מוליכים כגון שמני סיכה. דבר זה יכול לחסוך אטימה יקרה של מבנה גלגל הקידוד ולמזער את הדרישה לניקוי תקופתי או להחלפה של הדיסק, הדרושים לעתים קרובות כאשר משתמשים במקודדים אופטיים. באותו הזמן, המקודד הקיבולי מספק דיוק דומה או גדול יותר בהשוואה לטכנולוגיות מקודד אחרות, עם ערך דיוק אופייני של 0.2 מעלות.
יתרון נוסף של המקודד הקיבולי הוא שניתן לכוון את הרזולוציה בצורה דינמית, בעוד המקודדים האופטיים הם קבועים כך ששינוי הרזולוציה דורש התאמה של מקודד שונה. רזולוציה שניתנת לכיוון מספקת יתרונות בפיתוח, בכך שהיא מאפשרת למהנדסים לבצע שינויים כלשהם לאבי-טיפוס מהר ובקלות, ומסייעת גם לניהול שרשרת האספקה של הייצור בכך שהיא מאפשרת שימוש ביחידת שמירת-מלאי יחידה (stock-keeping unit – SKU) בבקרי מנוע מרובים בעלי רזולוציות שונות. מבנה המקודד מתוכנן להרכבה קלה ותומך באופציות הרכבה שונות. בנוסף, מסופקים גדלי שרוול מרובים כדי להתאים לקוטרי ציר המנוע המשמשים לרוב.
חסכונות באנרגיה ושבחי יעילות
למקודדי AMT דרישות זרם מאוד נמוכות, עם סדרות אחדות הצורכות פחות מ-10 מילי-אמפר של זרם ברזולוציה הגבוהה ביותר. דבר זה מתאים ל-0.2 ואט במערכת בעלת ארבעה מנועים הפועלת ב-5 וולט. כזכור, מקודדים אופטיים ומגנטיים יכולים לצרוך זרם הרבה יותר גבוה, ובכך להגדיל משמעותית את צריכת ההספק הכוללת במערכת בעלת מנועים מרובים. טבלה 1 מראה את ההספק הנצרך על-ידי המקודדים בלבד במערכת בעלת ארבעה מנועים כגון טיסן או רובוט נייד, ומשווה את ביצועי המקודדים הקיבוליים AMT של CUI עם חלופות אופטיות ומגנטיות. מקודדים קיבוליים מציעים פיתרון יעיל-לאנרגיה טובה יותר, ויכולים לתת למתכננים יתר חופש בניהול מאזן הספק מוגבל ביישומים ניידים ומוזני-סוללות. יתר על כן, זרם ההפעלה של המקודד הקיבולי בלתי-תלוי בקביעת הרזולוציה, דבר המאפשר לקביעות המקודד מיטוב מבלי להשפיע לרעה על צריכת הספק היישום.
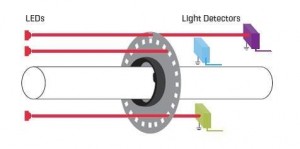
איור 1. מקודד אופטי המכיל מקורות LED, מקלט וגלגל קידוד
כאשר הם מחוברים למנוע dc ללא מברשות, מקודדים קיבוליים מאפשרים גם "איפוס" דיגיטלי יותר מהיר ויותר קל לשם כיוונון של אותות U, V, ו-W של המקודד עם ליפופי הרוטור. כדי לכוונן מקודד אופטי, הרוטור נעול בד"כ במצב ידוע וגלגל הקידוד מכוונן פיזית. המנוע מוזן לאחר מכן לאחור תוך שימוש באוסילוסקופ כדי לוודא כיוונון נכון של ה-back-EMF ונקודות הצלבת האפס של המקודד. זהו תהליך נישני (iterative) שיכול להימשך 15 עד 20 דקות, אם כי שגיאות קטנות עשויות להישאר. שגיאות אלו מונעות את הרצת המנוע ביעילות מרבית, ולכן מבזבזות בכך אנרגיית סוללה יקרת-ערך. אפשר גם שחוסר היכולת לייטב את הכיוונון עשוי לאלץ את המהנדס לקבוע נתוני-על של המנוע כדי להבטיח את מומנט הסיבוב הרצוי. בניגוד לכך, איפוס דיגיטלי על-ידי תכנות המקודד תוך שימוש ביישום תוכנה מבטיח כיוונון מושלם בכל עת. השלמת התהליך לוקחת שניות ומבטלת את השונות (variability) של יחידה-ליחידה. המנוע מוזן כדי לנעול את הרוטור במצב הרצוי והמקודד מאופס במצב זה תוך שימוש בפקודה יחידה בלבד. לא דרושים מכשירים נוספים. על-ידי אפשרות של כיוונון מדויק, הדיר, טכניקה זו מבטיחה שהמנוע מסוגל לפעול בצורה חלקה ביעילות מיטבית, ולספק על-ידי כך את הביצועים הטובים ביותר ולרבות את חיי הסוללה ביישומים ניידים.
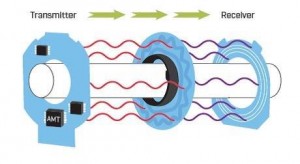
איור 2. מקודד קיבולי המשתמש באותו העיקרון כמו המחוגה הדיגיטלית Vernier
יתרונות מעבר ליישומי שימוש בסוללה
דרישות השוק ליתר ביצועים יכולות לספק די עידוד למתכננים של יישומים מוזני-סוללה לנצל את היתרון של מקודדים קיבוליים כדי להגדיל את היעילות של מערכות ההינע של הדור הבא. מאידך, ההופעה של נוהלים חדשים השולטים על יעילות מנועים חשמליים מראה שהמחוקקים נוקטים בעמדה יותר מחמירה כלפי יעילות מערכות מנועים חשמליים. אלה כוללות את התקן האחרון של ה-EU IEC 60034-30-1, אשר הכניס רמה חדשה של יעילות super-premium עבור מנועי אינדוקציה תלת-מופעיים. בארה"ב, משרד האנרגיה (Department of Energy – DoE) יפעיל חקיקה חדשה באמצע 2016 אשר מעלה את תקני היעילות המזערית ומכילה סוגי מנועים שלא נכללו בעבר. ניתוח ה-DoE מעריכה שיותר מ-70% של כלל חסכונות האנרגיה הפוטנציאליים הניתנים להשגה דרך החקיקה החדשה ניתנים לביצוע דרך חסכונות ברמת המערכת דוגמת שיפור יעילות הרכיבים ושימוש במנועים קטנים ככל האפשר. מקודדים קיבוליים יכולים לסייע לשימוש במנועים קטנים יותר, ומאפשרים למתכננים להפחית את צריכת ההספק של המערכת כולה. גורמי ממשל מוסיפים להתמקד בצורה חדה יותר בשטח זה.

סיכום
אוטומציה סבירה בצורה של רובוטים קטנים ניידים וטיסנים אזרחיים עשויה לשנות דרסטית פעילויות ודוגמת ניהול הייצור, ההפצה והנכס. מקודדים קיבוליים בעלי הספק נמוך ודיוק יכולים לספק חסכונות בעלי ערך בצריכת האנרגיה הכוללת עבור יישומים ניידים, עשירי-מנוע, תוך החלקת הפיתוח והייצור כמו גם תקורות התחזוקה, ומסייעים בכך להקטנת עלויות הבעלות. בשעה שנוהלי הממשל העתידיים מראים עמדה מחמירה לגבי יעילות האנרגיה של מערכות מנועים, המתכננים עתידים למצוא עוד יותר תמריצים כדי לאמץ טכנולוגיה זו.
Jeff Smoot is VP of Motion Control
at CUI Inc.
