




הקדמה
ככל שהרובוטים נעשים מתוחכמים יותר כך הם מסוגלים להתמודד עם מספר הולך וגדל של תהליכים תעשייתיים. רובוטים בעלי שש דרגות חופש תנועה (6 Degrees of Freedom) מסוגלים לבצע תנועות מורכבות המאפשרות להם למלא בהצלחה משימות תעשייתיות מסובכות רבות כגון ערימת משטחי מטען, שינוע, הדבקה וריתוך. רובוטים בעלי שש דרגות חופש תנועה יכולים להרים ולתפעל ביעילות מטענים כבדים ולהזיז אותם באופן מדויק בגאומטריה מורכבת.
בשל היכולות והגמישות המעולים שלהם מוטלות משימות רבות ושונות באמצעות מגוון רחב של כלים על רובוטים בעלי שש דרגות חופש תנועה. אולם כדי לנצל את היכולות של רובוטים אלו יש צורך בכיול מחדש בכל פעם שמשתמשים בכלי חדש. לעיתים קרובות הכיול מחדש גוזל זמן ואינו מדויק, והדבר בולם את פעולתם החלקה של תהליכים תעשייתיים ומעכב את הייצור.
סרווטרוניקס פיתחה שיטת לימוד-מיקום (teach-position) יעילה לכיול מהיר של כלים חדשים המשמשים רובוטים מסוג 6DoF, ללא הצורך להסתמך על מדידות היצרן או על חיישנים חיצוניים. השיטה קלה, מדויקת ושימושית עבור יישומים מעשיים.
-

- איור 1
-

- איור 2
-

- איור 3
כיול
רובוט 6DoF אוחז ומניע כלי כדי למלא משימה. לקבלת תוצאות משביעות רצון על הרובוט לדעת את מיקומו המדויק של הכלי בזמן עבודתו. בכל פעם שמחובר לרובוט כלי אחר, יש לכייל מחדש את הרובוט באופן מדויק.
קיימות שיטות שונות לכיול רובוטים בעלי שש דרגות חופש תנועה. מגע עם חלקי ייחוס, שימוש בחיישני מרחק ושימוש באינטרפרומטריה של לייזר הן רק חלק מהשיטות הקיימות. כמו כן, ניתן לחבר חיישנים חיצוניים כגון מערכת מצלמות למיקומים רובוטיים שונים כדי לקבל את מיקומו המדויק של חפץ ייחוס שעל פיו ניתן לכייל את הרובוט.
שיטות אלו גוזלות זמן ומסובכות. החברה פיתחה שיטה פשוטה יותר שכבר השיגה תוצאות מצוינות. נתאר את השיטה להלן.
קביעת נקודת המרכז של הכלי
שיטות כיול קינמטיות משמשות כדי לקבוע את נקודת המרכז של הכלי (TCP), הנקודה שביחס אליה כל מיקומי הרובוט מוגדרים. נקודת המרכז של הכלי מוגדרת ביחס למערכת הצירים העולמית, מערכת הצירים הקרטזית לכל נקודה בעולם, שהיא תמיד נייחת ביחס לרובוט.
מערכת הצירים של הכלי מגדירה את המיקום ואת הכיוון של הכלי, ונקודת האפס שלה נמצא בנקודת המרכז של הכלי. נקודת המרכז של הכלי של הרובוט נעה למיקומים מתוכננים בעת ביצוע תנועה קרטזית. החלפת הכלי משנה את מערכת הצירים של הכלי, ודורש כיול מחדש כדי לאפשר לנקודת המרכז החדשה להגיע במדויק אל המטרה.
ביישומים רובוטיים רבים, מסלולי התנועה של נקודת המכרז של הכלי מייצגים נתיבים מורכבים במרחב העבודה של הרובוט, בדרך כלל נתיבי קו-ישר עם שינויי כיוון מסוימים של הכלי שמבוצעים על ידי הרובוט. לפעמים יש צורך להחליף את הכלי עצמו, אפילו לעיתים קרובות. בכל פעם שהכלי מוחלף יש להגדיר מערכת פרמטרים גאומטריים חדשה לפני שניתן לחדש את העבודה.
ברוב היישומים התעשייתיים לימוד-מיקום הוא האמצעי המעשי ביותר לכתיבת משימות עבור רובוט. בשיטה זו יש צורך להכיר את הפרמטרים של הכלי (בדרך כלל מסופקים על ידי היצרן) בדיוק רב. ההיסט הזוויתי של הכלי (אנכי, רוחבי ואורכי) וההיסט הקרטזי דרושים לשם יצירת נתיבי קו-ישר עם כיוון מבוקר של הכלי.
לרוע המזל, לעיתים קרובות למדי, המפעיל אמור לזהות את הגיאומטריה של הכלי תחת מגבלות מסוימות: (1) העדר ידע אפריורי של ממדי הכלי מהיצרן; (2) העדר סיוע חומרה; (3) העדר ידע בנוגע לאופן חיבורו של הכלי לאוגן הרובוט. אל מול מגבלות אלו על המפעיל לנקוט בהליכי כיול גוזלי זמן בכל פעם שהכלי מוחלף.
הערכה מדויקת נעשית פשוטה
החברה פיתחה שיטה להערכה מהירה ומדויקת של גיאומטריית הכלי ללא חיישנים חיצוניים, ראייה או אמצעי עזר אחרים, וללא צורך בהסרת הכלי. בשיטת לימוד-מיקום זו כל שעל המפעיל לעשות הוא להביא את נקודת המרכז של הכלי של הרובוט למספר מיקומים/כיוונים שונים, שלאחר מכן יוזנו באופן אוטומטי לאלגוריתם הערכת ממדי הכלי המותקן על הרובוט. האלגוריתם קובע במהירות את הכיול המדויק של הכלי החדש ומכין אותו לשימוש מידי.
הדיוק של שיטת כיול זו משתפר ככל שיותר מיקומים/כיוונים של הכלי משמשים קלט עבור האלגוריתם. ניסויים שערכנו הראו כי השימוש במטריצה הומוגנית הפוכה אינו מוביל בהכרח לתוצאות הרצויות, אולם אומדן בשיטת הריבועים הפחותים מספק ערכים המובילים לכיול מדויק.
תאור השיטה
הבדיקות שלנו נערכו באמצעות רובוט בעל שש דרגות חופש תנועה עם כלי מחובר, שישה מגברי סרוו CDHD עתירי ביצועים ובקר softMC של החברה. השיטה שלנו כרוכה בחישוב אנליטי ואינה דורשת את הסרת הכלי. מבוצעת הערכה של צירי XYZ בלבד תחת ההנחה כי קצה הכלי נמצא במיקום קרטזי קבוע.
מובן מאליו כי על כל קונפיגורציה רובוטית המצביעה על אותו המיקום להיות ממוקמת על גבי ספרה כשקצה הכלי נמצא במרכז הספרה כפי שניתן לראות באיור 2.
מדידת נקודות על גבי הספרה מאפשרת לחשב את נקודת המרכז של הכלי (איור 3).
כש-t הוא המרכז.
משוואה (1) לעיל מכילה ארבע פרמטרים נעלמים (R, Xt, Yt ו-Zt). הערכים של X, Y ו-Z מחושבים באמצעות קינמטיקה ישירה. כדי לחשב את ערך נעלמי המשוואה השיטה שלנו דורשת לפחות ארבע נקודות להגדרת הספרה. לפיכך יהיו ארבע תצורות אלו כדלקמן:
R2=(X1-Xt)2+(Y1-Yt)2+(Z1-Zt)2
R2=(X2-Xt)2+(Y2-Yt)2+(Z2-Zt)2
R2=(X3-Xt)2+(Y3-Yt)2+(Z3-Zt)2
R2=(X4-Xt)2+(Y4-Yt)2+(Z4-Zt)2
באמצעות חיסור משוואות אנחנו נפטרים לא רק מהמשתנה הנעלם R, אלא גם מכל הרכיבים הלא-ליניאריים שבמשוואות. אנחנו נשארים עם מערכת משוואות רבות-איברים מדרגה 1 שאותן ניתן לפתור באמצעות שיטת ריבועים פחותים ליניארית. שימוש ביותר מארבע נקודות יוביל ליותר משוואות ולדיוק רב יותר.
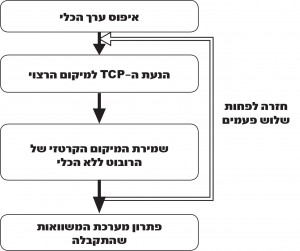
השיטה ההדרגתית דורשת רק מספר דקות הנדרשות לעריכת ארבע מדידות לפחות, כמוצג בתרשים 1.
סיכום
השיטה של סרווטרוניקס מהירה, מדויקת וזולה, והיא מאפשרת לכייל את הכלי ללא הסרתו. השיטה ניתנת ליישום בקלות, ללא חומרה ייעודית, וחוסכת זמן ומאמץ בכל פעם שכלי חדש מורכב. באפשרות בוני מכונות ליישם את השיטה בקלות וליהנות מכיול מחדש מהיר, מדויק וכמעט ללא עלויות של כלים עבור רובוטים בעלי שש דרגות חופש תנועה, באופן שיגביר את התפעול החלק ויזרז את הייצור במגוון רחב של יישומים.
ערן קורקידי (M.Sc.), קבוצת ההינע, מהנדס תוכנה ויישומים, ומירקו בוריץ' (M.Sc.), קבוצת ההינע, מנהל – חברת סרווטרוניקס.
