

החלטה לגבי איזה סוג של פתרון ניווט משולב GNSS ו-INS יתאים לאפליקציה מסויימת יכולה להיות משימה לא קלה. שיפורים מהירים בטכנולוגיות IMU מבוסס MEMS והתרבות של יצרנים הקטינו את פערי הביצועים לעומת מחיר משמעותית בהשוואה לחיישנים גדולים ויקרים יותר.
בכתבה זו נציג אילו ביצועים ניתנים להשגה בשימוש במערכת ה-SPAN GNSS/INS של Novatel המשלב את מוצרי ה-GNSS שלה עם מגוון של חיישני IMU. החיישנים שנסקור כאן, ממגוון יצרנים, עברו בדיקות רבות ונחשבים לטובים מסוגם כל אחד תחת קטיגוריית ביצועים שונה.
האנליזה שמוצגת כאן באה להבהיר אילו ביצועים ניתנים להשגה עבור כל חיישן ואיך לבחור פתרון מתאים לכל אפליקציה.
שיפורים גדולים נעשו לא רק בטכנולוגיית IMU אלא גם ביכולת לנצל את האינפורמציה של החיישן באופן מיטבי. שיפורים אלו באים לידי ביטוי בחיישני MEMS. חיישני MEMS בד”כ יותר קטנים, צורכים פחות הספק וזולים יותר מחיישנים מסורתיים.
חברת Novatel מציעה קו מוצרים tightly coupled העונה לשם SPAN – Synchronized Position Attitude Navigation. פתרון ה-INS בנוי משילוב של מקלטי ה-GNSS של Novatel עם מגוון IMUs בעלי ביצועים, תכונות ומחירים שונים.
כל הבדיקות עבור אנליזה זו נעשו ברכב כאשר המיקוד היה להראות השפעת עבודה עם פרופילים מוגדרים מראש על רמת הביצועים הכוללת. הבדיקות בוצעו תחת שלושה תרחישים: תנאים אידיאליים, תנאי קליטת לויינים קשים ותנאים בהם הקליטה כמעט ולא קיימת. כך ניתן לראות לא רק אילו ביצועים ניתן להשיג אלא גם לשמש כמדריך בנסיון לעזור בבחירת IMU ומערכת GNSS/INS לאפליקציה מסויימת.
-

- איור 1. הציוד הנבדק

-
- איור 2. המסלול במרחב העירוני

-
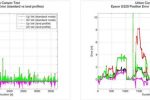
- גרף 3. Epson G320 שגיאת מיקום (Std vs Land)
-
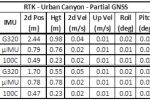
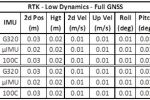
- טבלה 2. שגיאות RMS במוד RTK עבור Urban Canyon
-
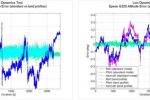
- גרף 4. Epson G320 שגיאת מהירות (Std vs Land)
-
- איור 6. מסלול הבדיקה של דינמיקה איטית

הציוד הנבדק כלל מקלט OEM7 כפלטפורמה העיקרית. השתמשנו בכרטיס OEM7700 אשר אליו שודכו שלושה חיישני IMU משלוש קטיגוריות ביצועים שונות. כיוון שסדרת ה-OEM7 מסוגלת לקלוט את כל הקונסטלציות של ה-GNSS וכל התדרים, קינפגנו את כל היחידות לקליטה מירבית יחד עם אנטנה רחבת סרט מסדרת PINWHEEL אשר מסוגלת לקלוט GPS L1/L2/L5 ,GLONASS L1/L2, BeiDou B1/B2 ו-Galileo E1/E5b.
להלן רשימת החיישנים שנבדקו:
Epson G320
חיישן MEMS קטן עם צריכת הספק נמוכה
Litef µIMU-IC
חיישן גדול יותר (Tactical grade) מבוסס MEMS
Litef ISA-100C
חיישן מבוסס FOG
למרות שכל החיישנים מצויינים בקטיגוריה שלהם, המטרה הייתה להראות את הבעיות הפוטנציאליות שיכולות לצוץ באפליקציה ספציפית. יש לציין כי בחלק מהמקרים יש צורך בדיוק גבוה יותר מזה שיכול להתקבל בזמן אמת ולכן חברת נובטל מציעה חבילות תוכנה לעיבוד Post processing בשם Waypoint Inertial Explorer.
בטבלה 1 מוצגים כמה פרמטרים הקשורים לביצועים ופיזיקה של כל חיישן.
-
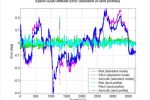
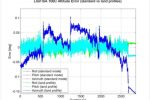
- גרף 7. שגיאת Attitude של Epson G320 גרף 8. שגיאת Attitude של Litef µIMU-IC
-
- טבלה 3. שגיאות RMS של RTK עבור דינמיקה נמוכה
-
- גרף 9. שגיאת Attitude של Litef ISA 100C
-
- איור 10. אזור החניון ומסלול הנסיעה

-
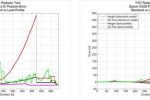
- גרף 11. שגיאת מיקום EPSON G320 גרף 12. שגיאת מיקום Litef µIMU IC
-
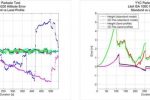
- גרף 13. שגיאת מיקום Litef ISA 100C גרף 14. שגיאת Attitude Epson G320
-
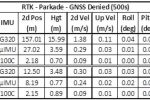
- טבלה 4. שגיאות RMS של RTK בחניון (500 שניות)
פרופילי INS שונים
התוספת העיקרית למוצר ה-SPAN הוא יכולת הגדרת פרופילי INS שונים – אלו הם אילוצי מידול של הסביבה והרכב היכולים לשפר את ביצועי הפילטר. לדוגמה, הפרופיל ה”קרקעי” מיועד לשימוש עם אפליקציות קרקעיות שלא יכולות לנוע בצורה רוחבית. ההנחות המוצגות עבור כלים קרקעיים לא בהכרח מתאימות לכל סוגי התנועה כמו של מסוק.לכן מומשו פרופילים המאפשרים קונפיגורציה ושליטה של המשתמש המאפשרים קבלת ביצועים מקסימליים כתלות באפליקציה.
הפרופיל הקרקעי דומה לשיטת ה-Dead reckoning. בשיטה זו משתמשים במידע אפריורי של תנועה אופיינית של כלי רכב כדי לתחום את עליית השגיאה. או במילים אחרות מתבצעות הנחות על איך כלים יבשתיים נעים כדי לפשט ניווט קרקעי משש דרגות חופש למשהו שקרוב יותר לחישוב מרחק וכיוון.
סביבת הניסוי
הציוד הנבדק שכלל מקלטי GNSS וחיישני IMU הונח בתוך רכב אחד וכל הנתונים נדגמו בו זמנית עבור כל התרחישים. כל חיישני ה-IMU הותקנו על מבנה קשיח ובמקלטי ה-GNSS נעשה שימוש בסדרת OEM7 עם אותה גרסת תוכנה וכולם חוברו לאותה אנטנה.
בכל הבדיקות לא נעשה שימוש במגברים נוספים מעבר לאנטנה המשותפת או בחיישן אחר כגון אודומטר. שימוש בחיישנים נוספים עוזר מאוד לדיוק הפתרון אבל זו לא הייתה המטרה בבדיקה זו.
כדי למזער הבדלי מיקום כפי שמתקבלים ממקלטי ה-GNSS, נעשה שימוש במוד RTK כאשר התשדורות מתחנת הבסיס (מרחק בין 5 ל-30 ק”מ) הועברו על גבי רשת האינטרנט בפרוטוקול NTRIP. לא נעשה שימוש ב-L band ולא הופעל מוד של PPP.
כל מערכת בבדיקה נבנתה לפי איור מס’ 1.
תרחישי הניסוי
שלושה תרחישים נבדקים: מרחב עירוני (Urban Canyon), דינמיקה איטית, וחניון תת קרקעי. כל שלושת התרחישים יראו את ה-TRADEOFF בשימוש בכל חיישן ושימוש בפרופיל SPAN שונה.
במרחב העירוני נוכל לחוות את הביצועים במגבלות קליטה של GNSS האתגר הוא לשמור על דיוק גבוה כאשר הקליטה קטועה או לא קיימת.
בדינמיקה איטית המטרה להראות את היתרונות של הפרופיל הקרקעי ובעיקר את השפעת עדכוני ה-Phase windup על מנת לשמור על דיוק האזימוט.
בחניון נראה את יעילות השימוש במודל אילוצי המהירות על כל דרגת חיישן IMU ככל שהפסקת קליטת הלווינים נמשכת ולא מגיעה שם אינפורמציה חיצונית לפילטר ה-INS כלל.
בדיקות במרחב העירוני Urban Canyon
סביבת המרחב העירוני תמיד שמשה כטיעון המרכזי ליתרון בשימוש במערכת משולבת GNSS/INS בפתרונות ניווט. זאת כיוון שמרחבים אלו מאוד נפוצים ומאוכלסים בצפיפות ומהווים סביבת מאתגרת ל-GNSS, הם מייצגים מיקום שהוא גם חשוב וגם מהווה אתגר ליכולת לתת פתרון מיקום אמין. בד”כ מרחבים אלו כוללים חסמי קליטה, מחזירי אור/אות וחסמים אחרים כתלות בעיר. מהסיבה הזו המרחבים האלו משמשים כמקרה מבחן ליכולת של INS לגשר כדי לתת פתרון ניווט יציב.
פלטפורמת ה-OEM7 מסוגלת לקלוט את כל קונסטלציות ותדרי ה-GNSS. יכולת זו מהווה יתרון משמעותי במקרה של המרחב העירוני שם גודל השמיים הנראים מוגבל. במקרה כזה ככל שיש יותר לווינים נקלטים כך היכולת של ארכיטקטורת הצימוד של ה-SPAN יכולה לנצל יותר את המידע שכן קיים.
ניסוי של תרחיש זה בוצע במרכז העיר קלגרי בקנדה. המסלול, כמו שנראה באיור 2, כולל כמה גשרים עיליים עם אפס קליטה לזמן קצר מאוד וגם כמה מקומות צפופים ביותר מבחינת בינוי.
טבלה 2 שלמטה מראה את שגיאת ה-RMS של שלוש המערכות עם שימוש בפרופיל ברירת המחדל ובפרופיל הקרקעי. הדבר הראשון שניתן לראות הוא שהשגיאות נבדלות כתלות בחיישן ה-IMU למרות שההבדלים יחסית קטנים במיקום תודות לארכיטקטורת ה-Tightly coupled של מערכת ה-SPAN. אולם, בגלל שהמידע של ה-GNSS זמין חלקית, השינויים הנראים בשימוש בפרופיל הקרקעי יחסית צנועים בעיקר ככל שביצועי ה-IMU גבוהים יותר.
ניתן לראות כי שימוש בפרופיל הקרקעי נותן יתרון ברור בשימוש ב-IMU של EPSON – יתרון זה מודגם בגרפים 3 עד 5. גרף מספר 3 מראה את המיקום ואת הפרשי ה-RMS וניתן לראות במספר מקרים היכן שהשגיאה במוד של ברירת מחדל גדלה מהר יותר מאשר עם הפרופיל הקרקעי. דוגמה לפער זה מודגם באזור שנייה מספר 1500 כאשר קליטת ה-GNSS חסומה כמעט לחלוטין.
בדיקות בדינמיקה איטית
הבדיקות בדינמיקה איטית מתוכננות כדי לחכות תנאים הנחווים בשליטה על מכונות בתעשייה, חקלאות, כרייה וכדומה. במקרים אלו ה-GNSS איננו הגורם המגביל וניתן להשתמש בו לשליטה על שגיאות מיקום ומהירות בתדר נמוך של מערכת ה-INS. הבעייתיות היא בשליטה על ה-Attitude ובמיוחד שגיאת האזימוט כיוון שפרמטרים אלו קשים לצפייה ללא סיבובים ותאוצות משמעותיות.
הבדיקה בדינמיקה איטית בוצעה בתנאי שמיים פתוחים וכללה נסיעה לאורך קו ישר באזור כפרי לאורך 2 ק”מ במהירות של 10-15 קמ”ש (איור 6).
בטבלה 3 מוצגות שגיאות ה-RMS. ניתן לראות באופן ברור כי שגיאת המהירות והמיקום תחומים על ידי רציפות רמת מיקום ה-GNSS RTK ללא תלות בפרופיל. המבדל העקרי של הפרופיל הקרקעי הוא ביצועי ה-Attitude בזכות השימוש באילוצי Phase windup. מעבר לזה השיפור בביצועי ה-attitude קשור גם לאיכות ה-IMU.
ה-Epson G320 מדגים שיפור נראה בביצועי ה-Attitude לעומת ה-IMU המדוייקים ששם לא ניתן לראות זאת. זה צפוי שכן הדיוק של ה-Phase windup נמוך יותר מהדיוק של ה-IMUs מדרגות גבוהות.
בגרפים מס’ 7 עד 9 מוצגים דיוקי ה-Attitude עם ובלי הפרופיל הקרקעי. ניתן לראות במקרה זה את צבירת השגיאה בכל שלושת החיישנים למרות שיש לשים לב לקנה המידה השונה. התיקונים החדים בכל גרף מתייחסים לסיבוב פרסה בסוף כל קטע של 2 ק”מ ומראים כיצד לסיבוב יש השפעה חזקה על דיוק אזימוט.
בדיקות בחניון
באיור 10 מוצג מסלול הבדיקות שבוצעו בחניון. ניתן להתרשם כי רוב זמן השהיה בחניון היה באזור האמצעי תחתון בתמונה.
שלא כמו במסלול העירוני שבו יש מידע GNSS חלקי כאן אנו חווים זמנים ארוכים ללא קליטה כלל. בתרחישים כאלו בדיוק בא לידי ביטוי המפרט של החיישן שתואר בטבלה 1 והוא הופך לבעל משמעות רבה יותר.
דיוקי מיקום של כל IMU מוצגים בגרפים 11 עד 13. כל הגרפים מראים את השגיאה עם שימוש בפרופיל הקרקעי ובלעדיו. ניתן לראות באופן ברור את הירידה בביצועים מסדר שני במערכת שעובדת ללא הפרופיל (ברירת מחדל) כאשר אין זמינות כלל של GNSS.
אם מנתחים את המהירות מקבלים שיפורים דומים המיוחסים לשמוש בפרופיל הקרקעי. כמו במיקום גם השיפורים במהירות יותר משמעותיים עם חיישן IMU בעל ביצועים נמוכים. זאת כיוון שהפרופיל הקרקעי מומש כדי לתת מענה בדיוק לחיישנים אלו.
בגרף 14 ניתן לראות את שגיאת ה-Attitude עם ובלי שימוש בפרופיל הקרקעי.
תוצאות ומסקנות:
למרות שחיישני MEMS זולים ממשיכים להשתפר בביצועים וביציבות, עדיין לאפליקציה שבה הם באים לידי ביטוי יש קורלציה גבוהה למכלול הביצועים של מערכת INS נבחרת. עבור אפליקציות רבות, חיישני ה MEMS בשילוב עם פילטר אינרציאלי עמיד יכולים לעמוד בדרישות ולתת ערך רב. אולם, חלק מהאפליקציות ממשיכות לדרוש חיישנים מדרגה גבוהה יותר ולעיתים גם צורך ב-post processing כדי לעמוד בביצועים.
היכולת של ה-SPAN לנצל מידע חלקי של GNSS כמו Pseudorange ו-delta phase ואילוצי תנועה משמעותם שגם בשימוש בחיישני MEMS זולים ניתן לקבל פתרון עמיד בתנאי GNSS מאתגרים. אולם, השילוב והאינטגרציה הצמודה (tightly coupled) מוגבלת במקרים בהם אין כלל קליטת GNSS או בתנאים של דינמיקה איטית.
פרופילי INS המשתמשים באילוצי מהירות, phase windup, ופרוצדורות יישור (alignment) עמידות הוכיחו את היכולת לתת תוספת משמעותית לפתרון ה INS בתנאים קשים כמו אי קליטה של GNSS או דינמיקה איטית. השיפורים האלו הראו תרומה גבוהה ככל שדיוק ה-IMU ירד. יכולות אלו בשילוב עם ארכיטקטורת tightly coupled של ה SPAN והביצועים ההולכים ומשתפרים של חיישני ה-MEMS IMU מראים כי פתרונות GNSS/INS עמידים ימשיכו לשגשג גם במחירי מטרה נמוכים. אולם, אפליקציות מאוד מדוייקות כמו מיפוי ימשיכו להסתמך על חיישנים מדוייקים יותר כדי לעמוד בדרישות דיוק מחמירות יותר.
ריאן דיקסון הוא המהנדס הראשי של מוצר ה-SPAN ו-שילובי GNSS/INS בנובטל ומייק בוביי הוא מהנדס גיאו-אינפורמציה ראשי בנובטל.
המאמר קוצר ותורגם על ידי איתן דרייפוס מחברת WALDYTECH.
