



עשיית השבבים מתמקדת לאחרונה יותר ויותר בשוק הרכב העולמי. לכל מקום שלא תלך בתעשייה שומעים על המיקוד הטכנולוגי שנעשה כדי להתאים את הטכנולוגיות לאוטומוטיב. עדיין לא רואים את המגמה בנפחי הייצור ובהכנסות, מכיוון שהפעילות עומדת על כ-10% מהשוק. עם זאת, החלקים והטכנולוגיות החדשות יותר בשוק האוטומוטיב, מתקשרים ברובם לתחום הנהיגה העצמאית ומביאים עימם גידול שנתי של כ-30% (קרוב להכפלה כל שנתיים). ישנם כמה שינויים גדולים, כמו איתרנט לשוק האוטומוטיב או שוק האבטחה, בהם לא נעסוק היום. נושא שכן נעסוק בו הוא השינוי הגדול מכולם בתחום: הצורך בעיבוד חזותי מהיר ואמין.
ישנן שתי סיבות נפרדות מדוע מדובר בשינוי כה גדול. קודם כל, עיבוד חזותי צריך להיעשות בתוך הרכב. כמויות המידע עצומות, וגדולות מדי להעלאה לענן לצורך עיבוד. אך חשוב מכך, כלי רכב לא יכול לכלול דרישה לחיבוריות המערכות שלו לרשת מסוימת כדי לעבד מידע מחוצה לו, כמו צבע הרמזור או האם האובייקט שרץ לתוך הכביש הוא ילד או כדור. נדרשת רמת מחשוב בפנים-הרכב כפי שלא נדרשה מעולם עד כה באקו-סיסטם. הספקים המסורתיים אינם מבינים במעבדים בעלי ביצועים גבוהים ובתהליכי העיבוד המתקדמים. האקו-סיסטם הקיים בחברות הפועלות בתחום המובייל בתעשיית המוליכים-למחצה דווקא כן מבין, אך לא בכל המובנים. רמת האמינות הנדרשת כיום על ידי היצרניות בתחום הרכב ו"מספר הקסם" ISO 26262 (תקן מחמיר) הם נקודות התורפה שלהן ומקשה עליהן לפתח פלטפורמות ברמת אמינות ומהירות גדולות, כפי שנדרש מהתקנים המחמירים בתעשיית הרכב.
הסיבה השנייה נעוצה בעיבוד החזותי: אם הולכים אחורה מספר שנים, העיבוד החזותי היה אלגוריתמי, עם מיקוד על מחקר בתחום האלגוריתם לזיהוי קצוות (Edge-detection), בניית מודלים ב-3D ממידע שקיים ב-2D וכיוצא בזה. כיום, תחומים אלה נהפכו ל-CNN: רשתות עצביות בעלות שכבות של קונבולוציה (Convolutional neural nets). אך לא רק העיבוד החזותי הפך לעצבי אלא גם מספר גדול של תהליכי קבלת החלטות. עם זאת ניתן לומר שהעיבוד החזותי התקדם בשנתיים-שלוש האחרונות יותר מאי פעם.
תמונה TensorFlow .1
ועידת Embedded Vision שנערכת בסנטה-קלרה ארה"ב גדלה בחמש השנים האחרונות מאירוע מפגשים מצומצם לאירוע כולל של התעשייה עם כאלף משתתפים מחברות ברחבי העולם. הגידול במספר המשתתפים הוא עוד עדות למקום שתופס העיבוד החזותי בתחום המוליכים-למחצה והשקיקה להרחבתו. הטכנולוגיות הקשורות אליו יובילו למהפכה בתחום התחבורה, אך גם לפיתוחים חדשים בתחום מצלמות האבטחה שיוכלו להתריע על ההבדלים בין ילדיך שמתקוטטים לבין גנב שמנסה לחדור לבית, או רחפנים שיוכלו לעקוב ולצלם אותך עושה סקי בין העצים באתר הנופש.
Tensilica Vision C5 DSP – ליבת DSP IP לרשת עצבית
אימרה ידועה אומרת שהדבר הצפוי היחידי בנוגע למזג האוויר בבריטניה הוא שהוא לא צפוי. את אותו הצפי ניתן "להלביש" על רשתות עצביות ולהגיד שהן פשוט ישתנו עם הזמן. ככל הנראה, הביצועים הטובים ביותר ליחידת הספק מגיעים מתכנון עם RTL (או אפילו בשערים לוגים). אבל זוהי גם הדרך הפחות גמישה לשינויים. הדרך הקלה ביותר להשגת גמישות בתיכנון היא באמצעות תוכנה טהורה, והרצת הקוד של הרשת העצבית על ה-CPU הראשי. דרך זו פשוטה אך אין לה סיכוי להשיג את הביצועים הנדרשים או את החיסכון באנרגיה. מעבד אופייני לרשת עצבית הניתן לתכנות הוא לא חם ולא קר. ניתן לתכנות אך דורש ביצועים גבוהים פר וואט.
כדי להדגים את המהירות בה דברים משתנים: בשנת 2012 AlexNet הייתה מערכת הזיהוי הטובה ביותר שדרשה 724M MACS/image. כיום, RESNET-152 דורשת יותר מ-11B (וכמובן, מביאה תוצאות טובות יותר). מהירויות השינוי מצביעות על הקושי הגדול שעומד בפני האנשים שמתכננים את המוצרים כיום: כיצד ניתן ליצור פלטפורמה מתאימה ב-2017 למוצר שישווק ב-2019 ואולי אף כמה שנים לאחר מכן. על הפלטפורמה להכיל את שלושת המאפיינים הבאים: ביצועים גבוהים, צריכת אנרגיה נמוכה ויכולת היתכנות. תכנון פלטפורמה או טכנולוגיה בעלת שניים משלושת המאפיינים היא לא משימה קשה אך שילוב של שלושתם, שלרוב באים אחד על חשבון השני, היא משימה מסובכת בהרבה.
קיידנס הכריזה לאחרונה על חבר חדש למשפחת Tensilica: Tensilica Vision C5 DSP – ליבת DSP IP לרשת עצבית (neural network), הראשונה בתעשייה שהיא עצמאית, מוכללת ומותאמת ליישומי ראייה, מכ"מ, LIDAR וקול – כולם בעלי דרישה לזמינות גבוהה של מחשוב רשתות עצביות. ה-Vision C5 DSP מיועד לשוקי הרכב, המעקב, הרחפנים והמחשוב הנייד והלביש, ומציע יכולת מחשוב של 1TMAC/sec כדי להפעיל את כל משימות המחשוב של הרשת העצבית.
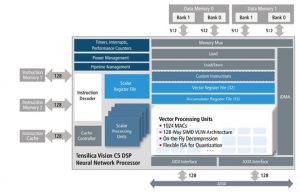
פלטפורמה זאת בשונה מפתרונות אחרים הקיימים בשוק אינה מאיץ תוכנתי (Accelerator) אלא מעבד DSP העומד בפני עצמו היכול לבצע OFFLOADING מהמעבד המרכזי (HOST CPU).
בשונה ממאיץ המקושר למעבד ועושה רק שלבי קונבולוציה, ה- Vision C5 יכול לבצע את כל שלבי העיבוד הנדרשים לCNN מבלי להמצא בקשר תמידי עם המעבד הראשי וכך לחסוך תעבורה רבה של מידע שעלולה להעמיס את המערכת ולהביא להאטה בביצועים ולבזבוז הספק רב.
תמונה Vision C5 DSP .2
הרשתות העצביות נהיות יותר ויותר עמוקות ומורכבות ודרישות המחשוב הולכות וגדלות במהירות במקביל. בהתאם לכך, גם הארכיטקטורה של הרשתות העצביות הולכת ומשתנה ללא הרף, כאשר רשתות חדשות מופיעות כל הזמן ויישומים ושווקים חדשים ממשיכים לצוץ ולהתגלות. המגמות הללו מניעות את הצורך בפתרון עיבוד עתיר מחשוב של רשתות עצביות עבור מערכות משובצות, שלא זו בלבד שמצריכות הספק נמוך, אלא גם בעלות יכולת היתכנתות גבוהה ומאפשרות גמישות ורמה נמוכה של סיכון עם התאמה לשימושים עתידיים.
מערכות ראייה מבוססות מצלמה בכלי רכב, ברחפנים ובמערכות אבטחה, מצריכות שני סוגים בסיסיים של מחשוב מותאם ראייה. ראשית, הקלט מהמצלמה משתפר עם השימוש באלגוריתמים מסורתיים של דימות/צילום ממוחשב. שנית, אלגוריתמי זיהוי מבוססי רשת עצבית מבצעים איתור וזיהוי אובייקט. פתרונות קיימים של מאיצי רשת עצבית הם מאיצי חומרה המחוברים ל-DSPs של דימות, כאשר קוד הרשת העצבית מתחלק בין הפעלה של שכבות רשת מסוימות על ה-DSP לבין פריקה של שכבות קונבולוציה של הרשת אל המאיץ. שילוב זה אינו יעיל במיוחד ואף צורך רמות לא הכרחיות של אנרגיה.
לרוב, יישומי רשת עצבית מחולקים לשני שלבים: הדרכה (training) והסקה (inference). ההדרכה נעשית לרוב בענן ודורשת עיבוד של קבוצות גדולות של מידע, הדורשות בין 1016 עד 1022 MACs פר קבוצה. הסקה לרוב רצה על קצה הרשת, ברחפן או מכונית, לדוגמא. כל תמונה דורשת בין 108 ל-1012 MACs. העניין המרכזי, הנובע מכך, הוא ההספק. שלב ההיסק המשתמש ברשתות עצביות נמצא היכן ש-Vision C5 DSP פועל באופן ממוקד.
מעבד Vision C5 DSP neural לרשת עצבית מביא עימו מגוון מאפיינים, בהם: DSP מלא ועצמאי שמסוגל להריץ את כל שכבות ה-CNN (קונבולציה, מחובר-לחלוטין ועוד), יכולת מחשוב של 1TMAC/sec, 1024 8-bit MACs או 512 16-bit MACs לביצועים יוצאים מן הכלל בשתי הרזולוציות, ארכיטקטורת 128-way, 8-bit SIMD or 64-way, 16-bit SIMD VLIW ועוד.
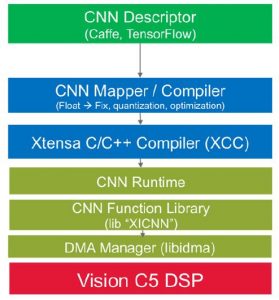
חומרה טובה לא תבוא לידי ביטוי בצורה הנכונה כשקשה לתכנת. קיימות מסגרות CNN בקוד פתוח סטנדרטי כמו Caffe ו-TensorFlow שהן הדרך הנפוצה ביותר לפיתוח. זרימות אלה נכנסות בצורה נקייה ל-mapper של ה-CNN ומשם לאורך כל הדרך ל-Vision CD DSP.
