




פתרונות מתקדמים להנעה מדויקת בעזרת מנועים פיאזואלקטריים
מערכות הנעה מדויקות משמשות כרכיבים קריטיים במגוון רחב של תחומים טכנולוגיים. עם התקדמות הטכנולוגיה והקטנת מימדי ההתקנים, עולות בהתמדה הדרישות לאחידות התנועה ודיוקי המיקום. בד-בבד ההספקים המותרים ונפחי ההתקנה של מערכות ההנעה קטנים. בנוסף לכך תחומים רבים דורשים עמידה בתנאי סביבה קשים, תוך אבטחת ביצועים דינאמיים מאתגרים, לאורך שנות עבודה ארוכות.
להלן מספר דוגמאות דורשניות. כיוון מצלמות וגימבלים בתחום ההדמיה מצריך דיוקים ברמת עשרות בודדות של מיקרו-רדיאנים. אחידות תנועה ודיוקי מיקום של עשרות נאנומטרים נדרשים הן עבור כיוון מראות ועדשות בתחום האופטיקה והן בסריקת דגמים בתחום המיקרוסקופיה. בתחום המטרולוגיה של התקני מל"מ דיוק מיקום ההתקן הנבדק אל מול המערכת הסורקת מתקרב לנאנומטר אחד. עבודה בתוך מיקרוסקופים אלקטרוניים, מערכות וואקום ובחלל מצריכה עמידות בוואקום גבוה, בעבודה לאורך שנים רבות, תוך דרישות אחזקה מינימאליות. אבטחת קצב עבודה גבוה בתנאים אלא מחייב תכנון של מערכות בעלות עמידות גבוהה לאורך זמן תוך מינימיזצית ההספק למניעת התחממות.
מנועים פיאזואלקטריים אולטראסוניים הינם בעלי תכונות ייחודיות המאפשרות עמידה בדרישות הדיוק, הביצועים והסביבה גם יחד. התפתחות הטכנולוגיה של מנועים אלא מאפשרת כיום בניה של פלטפורמות תנועה מוכללות המספקות פתרון מלא לתנועה רב צירית מבוקרת. לדוגמא, במות להנעת וופרים לתעשיית המיקרו-אלקטרניקה, מודולים קטנים לתעשיית האלקטרואופטיקה, במות לשימוש בחלל ועוד.
מנועים פיאזואלקטריים אולטראסוניים
מנועים פיאזואלקטריים אולטראסוניים פותחו בשנות השבעים של המאה שעברה, כמענה לצורך במנועים לא מגנטיים קטנים, להנעה מדוייקת, בתעשיית המיקרואלקטרוניקה. הפיתוח התאפשר גם בזכות זמינות הולכת וגוברת של חומרים פיאזואלקטריים איכותיים במחירים זולים יחסית. עקרון הפעולה של מנועים אלא הינו המרת אנרגיית ערור חשמלית לאנרגיה מכאנית ע"י צימוד סטטור פיאזואלקטרי, הרוטט בתדר הרזוננס, אל ציר תנועה מכאני. הפעלת המנוע מבוצעת ע"י הפעלת מתח חילופין בין (מערך) האלקטרודות שעל גבי הסטטור, וזאת בתדר מתאים לערור אופן רזוננס מסוים של סטטור זה. אחד מיתרונות התכנון של מנוע פיאזואלקטרי נמצא באפשרות השילוב בין תדר הרזוננס המכאני של הסטטור לבין תדר הרזוננס החשמלי של המעגל המספק את המתח. הודות לרזוננסים אלו ניתן לקבל מעוותים גבוהים של הסטטור הפיאזואלקטרי ע"י אספקת מתחDC נמוך בכניסה אל המעגל. תכנון זה מייתר את השימוש בספקי מתח גבוה אשר היו נדרשים אילולא כן, ומאפשר להפעיל את המנוע אפילו מסוללה.
למנועים פיאזואלקטריים אולטראסוניים מספר יתרונות לעומת מנועים אלקטרומגנטיים בעלי אותו גודל ומשקל. לעומת מנועים אלקטרומגנטיים יעילות המנועים הפיאזואלקטריים איננה יורדת עם גודל המנוע. על כן ניתן לבנות מנועים קטנים (קטנים משמעותית מ 1 סמ"ק) ללא איבוד יעילות המרת האנרגיה (אשר נשארת גבוהה גם במנועים גדולים). הצימוד המכאני הישיר של האלמנט הפיאזואלקטרי אל ציר התנועה (direct drive) (לדוגמא, במנועי Nanomotion) מאפשר העברה ישירה של מומנט/כוח, בעזרת חיכוך, ללא שימוש בגיר מכל סוג שהוא, וזאת לאורך מהלך תנועה שאיננו מוגבל (אלה רק ע"י המהלך החופשי של ציר התנועה עצמו). כתוצאה מכך ניתן לתכנן ציר תנועה ללא חופשים (no backlash), בעל קשיחות ותדר רזוננס גבוהים בכיוון התנועה, מה שמאפשר זמני תגובה קצרים ביותר, דיוק ואחידות תנועה גבוהים (דיוקים ברמות נאנומטריותultra-high precision ) וכן תאוצות ותאוטות גבוהות (hard brake). צימוד בעזרת חיכוך מאפשר לא לצרוך אנרגיה כלל כאשר ציר התנועה עומד במקום, תוך אבטחה של מרחקי סחיפה הקטנים מ 50 נאנומטר (תיקון אקטיבי מאפשר להגיע לסחיפה של פחות מנאנומטר בעמידה. לדוגמא בצירי התנועה של Nanomotion לתעשיית המיקרואלקטרוניקה).
חומרים פיאזואלקטריים הינם חומרים קרמיים קשים, לא מגנטיים, עמידים בממסים ובטמפרטורות גבוהות יחסית ובעלי לחץ אדים נמוך. תכונות אלו מאפשרות בניית צירי תנועה אשר אינם מושפעים מהפרעות אלקטרומגנטיות ולא גורמים הפרעות כאלה בעצמם (מתאימים לעבודה בתוך מכשירי MRI). הם מתאימים לעבודה בוואקום גבוה ובחדרים נקיים. תדרי הרזוננס של הסטטורים הפיאזואלקטריים גבוהים בהרבה מגבול השמע האנושי, מה שמבטיח עבודה שקטה.
מבין אפשרויות התכנון השונות של מנועים פיאזואלקטריים אולטראסוניים, מנוע המבוסס על שילוב של אופני תהודה L1 (רזוננס האורכי הראשון) ו B2 (רזוננס הכפיפה השני) של מלבן פיאזואלקטרי (מנוע מסוג L1B2) הוכח כבעל התאמה טובה לייצור המוני, אמינות גבוהה, טווח דינאמי גבוה של מהירות, דיוקי תנועה גבוהים, שחיקה נמוכה ואורך חיים גבוה. סוג מנועים זה מוצא כיום שימוש בתעשיות המיקרואלקטרוניקה, האלקטרואופטיקה, החלל והתעשייה הצבאית (מנועים וצירי התנועה של Nanomotion).
מבנה בסיסי של ציר תנועה
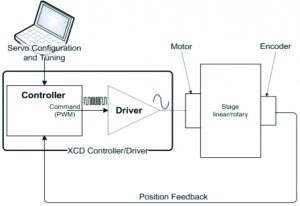 מבנה בסיסי של ציר תנועה יחיד המבוסס מנוע פיאזואלקטרי אולטראסוני מתואר באיור 1. הבקר מתבסס על אלגוריתם בקרה שהותאם למנוע פיאזואלקטרי בכדי לבצע פרופיל תנועה נדרש. פקודות הבקר נשלחות בצורת מתח למגבר אשר בתורו מפעיל מתח ערורAC , בתדר הרזוננס על גבי המנוע. המיקום הנוכחי של הציר מבוקר ומתוקן באופן תמידי ע"י שימוש בערכי המיקום הנשלחים באופן רציף אל הבקר ע"י אנקודר מיקום המשולב על הציר.
מבנה בסיסי של ציר תנועה יחיד המבוסס מנוע פיאזואלקטרי אולטראסוני מתואר באיור 1. הבקר מתבסס על אלגוריתם בקרה שהותאם למנוע פיאזואלקטרי בכדי לבצע פרופיל תנועה נדרש. פקודות הבקר נשלחות בצורת מתח למגבר אשר בתורו מפעיל מתח ערורAC , בתדר הרזוננס על גבי המנוע. המיקום הנוכחי של הציר מבוקר ומתוקן באופן תמידי ע"י שימוש בערכי המיקום הנשלחים באופן רציף אל הבקר ע"י אנקודר מיקום המשולב על הציר.
מנוע פיאזואלקטרי מסוג L1B2
אופן העבודה של מנוע L1B2 מתואר בצורה סכמאטית באיור 2. לסטטור הפיאזואלקטרי צורת מלבן. בחירת יחס האורך-רוחב הנכון עבור המלבן מאפשרת ערור בו-זמני של שני אופני הרזוננס L1 ו B2 ע"י הפעלה של תדר ערור יחיד (איור 2(a)). ארבע אלקטרודות מלבניות מיושמות על הפאה הגדולה העליונה של המלבן בצורה סימטרית, כאשר כל שתיים הממוקמות לאורך אלכסוני הפיאה העליונה, מחוברות ביניהן (איור 2(b)). הפאה הגדולה התחתונה של המלבן מכוסה כולה באלקטרודה יחידה. הפעלת מתח חילופין בתדר המתאים בין הפיאה התחתונה לבין אחד מזוגות האלקטרודות על הפאה העליונה גורמת לערור של שני אופני הרזוננס, L1 ו B2 במישור הפיאות הגדולות. כתוצאה משילוב אופני הרזוננס, קצה הסטטור מבצע תנועות אליפטיות (מיקרוניות), כאשר כיוון סיבוב האליפסה נקבע ע"י בחירת הפעלת המתח על אחד מתוך שני צמדי האלקטרודות שעל הפיאה העליונה. צימוד מכאני של הסטטור הרוטט אל ציר תנועה, גורם לתנועות האליפטיות של קצה הסטטור להעביר מומנט/כוח אל הציר הנע. סוג התנועה של הציר – ליניארית או סיבובית – נקבע ע"י בחירת הבמה המתאימה (ליניארית (איור 2(d)) או סיבובית (איור 2(e)). כיוון התנועה נקבע ע"י כיוון התנועה האליפטית, כאמור ע"י בחירת האלקטרודות.
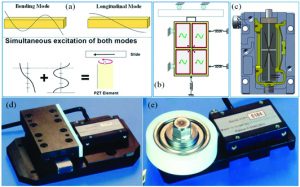 איור 2: מבנה בסיסי של מנוע L1B2: a) תיאור סכמאטי של שילוב אופני הרזוננס, b) תיאור סכמאטי של ערור הרזוננס, c) דוגמא ליישום הסכימה המתוארת ב (b) , d) תמונה של ציר ליניארי, e) תמונה של ציר סיבובי.
איור 2: מבנה בסיסי של מנוע L1B2: a) תיאור סכמאטי של שילוב אופני הרזוננס, b) תיאור סכמאטי של ערור הרזוננס, c) דוגמא ליישום הסכימה המתוארת ב (b) , d) תמונה של ציר ליניארי, e) תמונה של ציר סיבובי.
המבנה להלן יכול להיות מיושם בעזרת מנועים בגודל שונה, המספקים כוחות שונים. כדוגמא נביא את מנועי Nanomotion המתוארים בטבלה 1.
טבלה 1: נתוני כוח, מהירות, משקל ונפח של שלושה מנועי L1B2.
| Nanomotion HR8 vacuum motor | Nanomotion Edge4x motor | Nanomotion Edge motor | סוג מנוע |
| 120 גרם | 2.2 גרם | 0.55 גרם | משקל |
| אורך 41.9 מ"מ, רוחב 46.6 מ"מ, גובה 23.8 מ"מ | אורך 22.8 מ"מ, רוחב 12.4 מ"מ, גובה 4.3 מ"מ | אורך 13.5 מ"מ, רוחב 7.6 מ"מ, גובה 3.15 מ"מ | מימדים |
| מעל 30 ניוטון | מעל 1.3 ניטון | 0.4 ניוטון | כוח מקסימאלי |
| 250 מ"מ/שניה | 180 מ"מ/שניה | 180 מ"מ/שניה | מהירות מקסימאלית |
| תמונה |
ביצועי המנוע L1B2
דוגמא לפרופיל תנועה מהיר בדיוק גבוה מתוארת באיור 3. מנוע HR8 מחובר אל ציר תנועה ליניארי של במת וואקום בעלת מסה נעה של 0.5 ק"ג ואנקודר אופטי בעל רזולוציית מיקום של 10 נאנומטר (איור 3(a)). תנועה למרחק של 10 מילימטר מבוצעת תוך פחות מ 300 מילישניות (איור 3(b)). ההתכנסות סופית הינה אל חלון מיקום ברוחב של 50 נאנומוטר וסחיפה הקטנה מ 15 נאנומטר לאחר סיום התנועה והערור (איור 3(c)). חזרתיות בתנועות מחזוריות אל אותו חלון מיקום טובה מ 50 נאנומטר (איור 3(d)).
בנוסף לפעולתו כמנוע אולטראסוני, מנוע L1B2 ניתן להפעלה גם כאקטואטור וזאת ע"י הפעלה של מתח DC בלבד על פני אותן האלקטרודות המשמשות להפעלה אולטראסונית, כאשר בחירת אחד מתוך שני זוגות האלקטרודות קובע את כיוון התנועה. במצב הפעלה זה טווח התנועה הינו כמיקרון, דיוק מיקום מגיע כדי רמה תת-נאנומטרית (כאשר קיים אנקודר מיקום בעל רזולוציה מתאימה). שילוב של תכונות אלא מאפשר בין השאר ביטול אקטיבי של זחילה תרמית ומבנית של ציר התנועה (למרות שזחילת המנוע זניחה תיתכנה זחילות אחרות של הציר עצמו שאותן צריך לפצות) בזמן עמידה במקום. המתח הנדרש מופעל ע"י שימוש במגבר היכול להפעיל גם תנועה סטנדרטית ע"י מתח חילופין וגם תנועת אקטואטור ע"י מתח ישר. על כן תיקון המיקום לאחר ההתכנסות וביטול הזחילה מבוצעים מייד לאחר סיום התנועה ללא צורך להחליף את מנגנון הפעלה המכאני או החשמלי. דוגמא לשימוש במנוע HR8 כאקטואטור מתוארת באיור 4. המנוע מניע ציר תנועה ליניארי בעל מסה נעה של 2 ק"ג ואנקודר בעל רזולוציית מיקום של 0.4 נאנומטר. צעד של 4 נאנומטר מבוצע תוך שמירת מיקום עד לכדי טעות של פחות מנאנומטר אחד לפני ואחרי הצעד. אחידות תנועה עד לשגיאת מיקום של עשרות בודדות של נאנומטרים מודגמת באיור 5 המתאר תנועה במהירות קבועה של במה בעלת מסה נעה של 1.5 ק"ג, מנוע HR4-LS של Nanomotion ואנקודר בעל רזולוציית מיקום של 2 נאנומטר.
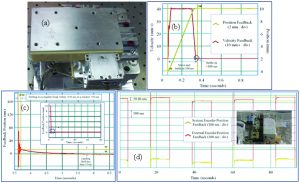
איור 3: דוגמא לפרופיל תנועה מהיר בדיוק גבוה. (a תמונה של ציר התנועה עם מנוע HR8, b), תנועה לאורך 10 מ"מ במהירות של 40 מ"מ/שניה תוך 300 מילישניות, c) הגעה לחלון מיקום סופי הקטן מ 50 נאנומטר וסחיפה הקטנה מ 15 נאנומטר לאחר סיום התנועה והערור, d) חזרתיות המיקום בתנועות מחזוריות אל אותו החלון של 50 נאנומטר. הגרף בצבע אדום מתאר מיקום ומהירות אשר נמדדו ע"י אנקודר חיצוני למערכת (דיוק אבסולוטי), בעל רזולציה של 0.1 נאנומטר.
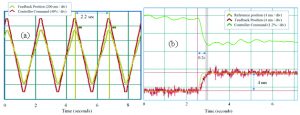
איור 4: דוגמא להפעלה של מנוע HR8 במצב אקטואטור. המנוע מזיז ציר תנועה ליניארי בעל משקל נע של 2 ק"ג ואנקודר בעל רזולוציה של 0.4 נאנומטר. a) תנועות מחזוריות בטווח של 600 נאנומטר. b) צעד של 4 נאנומטר ושמירת מיקום עד לטעות של כנאנומטר אחד לפני ואחרי הצעד.
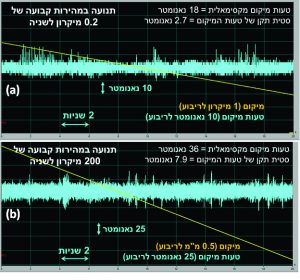
איור 5 : דוגמא לאחידות תנועה – מנוע HR4-LS של Nanomotion מניע במה ליניארית בעלת מסה נעה של 1.5 ק"ג ואנקודר בעל רזולוציית מיקום של 2 נאנומטר. a) תנועה במהירות קבועה של 0.2 מיקרון לשניה, b) תנועה במהירות קבועה של 200 מיקרון לשניה.
מערכי תנועה למגוון שימושים
כאמור, צירי תנועה מבוססי מנועי L1B2 מוצאים שימוש במגוון תחומים רחב – מבמות גדולות לתעשיית המיקרואלקטרוניקה עד למודולים קטנים וקלים לשימושים אופטיים וצבאיים. תמונות של מספר שימושים מובאים באיור 6: במת מיקרואלקטרוניקה גדולה עם מסה נעה של 30 ק"ג, טווח תנועה כ 450 מ"מ ודיוק תנועה של 2 נאנומטר (איור 6(a)), במה עם 5 דרגות חופש, בעלת דיוק כולל של 25 נאנומטר, לשימושי מיקרוסקופיה (איור 6(b)), במה הפועלת בהצלחה בחלל, בעלת 3 צירי תנועה, מסה 610 גרם, מימדים 100x90x60 mm3 , דיוק מיקום 0.5 מיקרון, הספק נצרך בזמן עבודה קטן מ 8 ואט כולל מגבר ובקר (איור 6(c)), זרוע רובוטית לא מגנטית לניתוחי מוח, בעלת 14 צירי תנועה (איור 6(d)), שאטר סיבובי קטן ליישומי NUC במצלמות אינפרא אדום או לחסימת קרן לייזר, מסה 2 גרם, מבצע סיבוב של 90 מעלות בפחות מ 50 מילישניות עומד במפרטים צבאיים של טמפרטורה, ויברציה והלמים (shock) (איור 6(e)), מודול קטן בעל שני צירי סיבוב בלתי תלויים, כאשר כל אחד מהם בעל מסה של כ 2 גרם ומבצע סיבוב של 60 מעלות בפחות מ 100 מילישניות (איור 6(f)), שאטר לינארי קטן, מסה 15 גרם, זמן פתיחה/סגירה 150 מילישניות (איור 6(g)).
איור 6: דוגמאות לפלטפורמות ת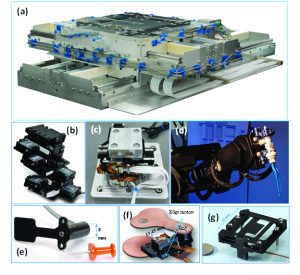 נועה המבוססות מנועי L1B2 של Nanomotion. a) במה דו-צירית מדוייקת לחדר נקי, b) במה בעלת 5 צירי תנועה לשימושי מיקרוסקופיה, c) במה בשימוש בחלל, d) זרוע רובוטית לניתוחי מוח המכילה 14 צירי תנועה מבוססי מנועי Nanomotion, e) שאטר סיבובי קטן, f) מודול סיבובי בעל 2 צירי תנועה בלתי תלויים, g) שאטר ליניארי קטן.
נועה המבוססות מנועי L1B2 של Nanomotion. a) במה דו-צירית מדוייקת לחדר נקי, b) במה בעלת 5 צירי תנועה לשימושי מיקרוסקופיה, c) במה בשימוש בחלל, d) זרוע רובוטית לניתוחי מוח המכילה 14 צירי תנועה מבוססי מנועי Nanomotion, e) שאטר סיבובי קטן, f) מודול סיבובי בעל 2 צירי תנועה בלתי תלויים, g) שאטר ליניארי קטן.
סיכום
הכרת היכולות הטכנולוגיות של הנעה פיאזואלקטרית מאפשרת מציאת פתרונות הנעה פורצי דרך בסביבות קשות ונוכח דרישות לדיוקים גבוהים מאוד. הכותבים מקווים שהמאמר יעזור באפיון מערכות הנע עתידיות.
