




"הגעה של רכבים אוטונומיים לכבישים היא לא שאלה של אם, אלא של מתי". אם הציטוט הזה נשמע מוכר, זה לא מקרי. מיצרניות הרכב הגדולות בעולם, חברות ענק כמו Google ו – Uber ועד סטארטאפים קטנים – כולם עוסקים בפיתוח הדבר הבא בתחום הרכב האוטונומי. המעורבות ההולכת וגוברת של רכבים אוטונומיים בתאונות דרכים בשנה האחרונה, בהם של רכבי Uber, Waymo ו – Tesla, עוררו את תשומת הלב העולמית לנושא הבטיחות ברכבים האוטונומיים.
בעוד שרבים מהסטארטאפים בישראל ובעולם האוטומוטיב מתמקדים בתחום הסייבר, מחקר שעשתה קבוצת Boston Consulting Group מראה שבטיחות הרכב האוטונומי היא הדאגה העיקרית של המשתמשים. מחקרים זהים שנערכו בקרב יצרני הרכב מצביעים על תוצאה דומה. "מחקרים אלו מראים שכיום בטיחות הרכבים האוטונומיים היא החסם העיקרי בפני פריסה מלאה או חלקית של רכבים אוטונומיים על הכבישים", אומר דניאל מלץ, מהנדס בכיר ב – Foretellix.
Foretellix, המספקת פתרונות מתקדמים לבדיקת מכלול המערכות החכמות של המכוניות האוטונומיות, השלימה השנה גיוס ראשוני של 2 מליון$ ונמצאת כעת בתהליכי גיוס עובדים למשרדיה בתל אביב.
לדברי מלץ, שהוביל בצבא ובתעשייה האווירית פרויקטים לפיתוח רכבים אוטונומיים, "כיום כולם יודעים שהבטיחות היא האתגר הגדול של התעשייה, אבל מעטים יודעים איך לפתור את האתגר. הרכב האוטונומי יהיה אחת היצירות היותר מורכבות של האנושות, עם 100 מיליון שורות קוד, פי 10 ממטוס נוסעים מודרני לדוגמה. מדובר במסה אדירה של מידע שלא ניתן להתמודד איתה בשיטות המקובלות".

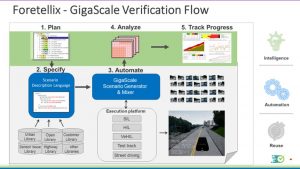
מערכת ניהול התרחישים של
«
Fortellix – מחוללת מאות מיליוני
תרחישים, "מערבבת" אותם
ומודדת מה נבדק
מה הביא אותך מהתעשייה הבטחונית לסטארטאפ צעיר בתחום?
"יצא לי לעסוק מראשית שנות ה- 2000 ברכבים אוטונמיים: בתחילה בפיתוח הרכבים האוטונומיים שיחליפו את הפטרולים המאויישים בצבא ולאחר מכן בתעשייה האווירית הובלתי את בדיקות הסימולציה לרכבים האוטונומיים. אם בתחילת התהליך התעשיות הבטחוניות הקדימו בהרבה את השוק האזרחי בתוך שנים ספורות המצב השתנה המצב התהפך וכיום השוק האזרחי נחשב למוביל. כשראיתי מהצד את הפריחה בשוק האזרחי, הרגשתי שאני מפספס את ההזדמנות להשפיע באופן רחב על תעשיית הרכבים האוטונומיים, במקום לעבוד על פרויקט נקודתי. עקבתי אחרי הבלוג של יואב הולנדר (ממייסדי Foretellix) והבנתי שבאמצעות הטכנולוגיה שמפתחים שם אפשר לשנות את כללי המשחק של הרכבים האוטונומיים. משם הדרך ל – Foretellix הייתה קצרה".
איך בודקים כל כך הרבה תרחישים לתאונות?
"תעשיית הרכבים האוטונומיים עומדת בפני משבר בגלל העדר יכולת לבדוק מה נבדק במדדים מוסכמים. גם תעשיית הצ'יפים עמדה בפני משבר כזה ואז עברה שינוי פרדיגמטי. אם בתעשיית הצ'יפים העלות של טעות היא אדירה, ברכבים אוטונומיים אנחנו מדברים על עלויות גדולות בהרבה, גם של חיי אדם וגם כסף.
כדי לאפשר בטיחות ברכבים אוטונומיים יש לבדוק מאות מיליונים של תרחישים משמעותיים. מחקרים מראים שכדי להראות שרכב אוטונומי בטיחותי לפחות כמו נהיגה ברכב "רגיל" צריך לנסוע 11 מיליארד מיילים, ואין שום דרך לעשות זאת. תעשיית הרכב מבינה את זה ולכן היום עוברים לבדיקות בסימולטורים בנוסף לבדיקות הפיזיות. הסימולטורים מאפשרים לייצר מיליוני תרחישים אך היום קשה עד בלתי אפשרי לנהל את הפקת התרחישים האלו בצורה יעילה שתראה את הכיסוי הכולל של מרחב העבודה של הרכב האוטונומי. למשבצת הזאת נכנסת Foretellix, שמפתחת מערכת המאפשרת יצירה, הרצה, מדידה וניהול של מאות מיליוני תרחישי בדיקה סימולטיביים".
מייסדי Foretellix, שמאחוריהם נסיון עצום בוריפיקציה בתעשיית השבבים, פיתחו מתודה ייחודית שנקראת (CDV) Coverage Driven Verification – ובאמצעותה ניתן לקבוע מדד מבוקר לתחומים הנבדקים. כחלק מהפתרון החברה מפתחת שפה ייעודית לתיאור תרחישיםSDL (Scenario Definition Language), שתהיה פתוחה, בשאיפה שתהפוך לסטנדרט בבדיקת רכבים אוטונומיים. על בסיס ה – SDL מתכוונים ב – Foretellix לפתח את ספריית התרחישים הראשונה לרכב אוטונומי, שתהיה פתוחה ויהיה ניתן להוסיף עליה תרחישים נוספים באמצעות קידוד בשפה החדשה.
"כמויות המידע האדירות של הרכבים האוטונומיים יצרו בעיה: איך בכלל יודעים מה בדקנו ומה לא? אם לדוגמה בדקנו תרחיש עם רכב אוטונומי שנוסע באור צהוב ב – 40 קמ"ש, איך נדע מה קורה כשאותו רכב יסע ב – 30,40,50 קמ"ש יותר או פחות, או כשחתול יתפרץ לכביש ועוד מאות מיליוני תרחישים אחרים שיש ביניהם הבדל משמעותי? ומה יקרה שכמה מהתרחישים יקרו בו זמנית? הייחוד בפיתוח של Foretellix הוא היכולת לבדוק את כל התרחישים האלו, "לערבב אותם" כך שיקרו בו זמנית, ולמדוד מה נבדק ומה לא".
מהן פלטפורמות הבדיקה הקיימות כיום לרכבים אוטונומיים?
"כיום אנחנו רואים התפתחות של מגוון פלטפורמות בדיקה בניהן פלטפורמות פיזיות כמו בחינה בכבישים ציבוריים, פלטפורמות וירטואליות כמו סימולציות ופלטפורמות היברידיות המשלבות בין העולמות כמו Test Tracks ו- HIL (Hardware in the Loop), אך הבדיקות המבוצעות בפלטפורמות אלו אינן מקושרות אלו לאלו באופן יעיל שיאפשר הצגה ברורה של תרחישים ספציפיים מתוך כלל התרחישים שבוצעו. המערכת של Foretellix יודעת להתחבר לכל פלטפורמות הבדיקה מכל העולמות באמצעות התאמה לממשקים השונים ולנטר את מימוש התרחישים לטובת ביצוע Coverage Driven Verification".
Giga Scale Verification – ניהול
תרחישים בקנה מידה עצום
Giga Scale Verification – לבדוק תרחישים בקנה מידה עצום
המערכת של Foretellix מתוכננת לבדוק מאות מיליוני תרחישים. בשלב הראשון מוגדרת תכנית וריפיקציה המגדירה את כלל המצבים הנדרשים להיבדק, והשילובים בניהם. בשלב השני מוגדרים תרחישי הבדיקה באמצעות כתיבתם בשפת SDL. בשלב הבא מבוצעת הרצה של התרחישים על הפלטפורמות השונות (כמו סימולציה מלאה, HIL ו- Test Track), הרצות אלו מנוטרות על מנת לבחון איזה חלק מתכנית הוריפיקציה הם מכסים. בשלב הסופי המערכת מאפשרת הצגה גרפית וסטטיסטית של העמידה בתוכנית הוריפיקציה.
מה מיוחד בשפת ה SDL?
אחת מתכונות הליבה של שפת ה SDL היותה שפה הצהרתית המאפשרת להגדיר את מרחב התרחישים הרצוי באמצעות סדרה קצרה של הגבלות או "אילוצים". כל תכונות התרחיש אשר לא אולצו, יוגרלו באופן אקראי. לדוגמה כדי לבצע בדיקה של התמודדות עם התפרצות אדם לכביש, מספיק לכתוב בשפת ה SDL, "keep person cross road before EGO " (EGO הינו הרכב האוטונומי). המערכת באופן אוטומטי תייצר ותריץ את כל התרחישים האפשריים המקיימים התפרצות אדם לכביש לפני הרכב האוטונומי, כולל כבישים מהירים, כבישים עירוניים, בני אדם מבוגרים וילדים. על מנת לבחון התמודדות ספציפית עם ילדים החוצים את הכביש בפתאומיות. ניתן להוסיף אילוץ:
"keep person.type = child", המערכת תחולל את כל תרחישי החצייה הפתאומית הכוללים ילדים. באופן דומה ניתן להוסיף אילוצים על סוג הדרך (keep road.lane_number = 2) על אופן החצייה keep) cross.angle > 100deg and cross.angle < 130deg), זמן החצייה (ה- keep before.time < 1sec) ועוד. אופן הגדרה וחילול זה של תרחישים מפשט מאוד את יצירת מגוון התרחישים הנדרש ומאפשר בצורה קלה להגדיר שילובים של תרחישים שונים ולהגיע לתרחישי קצה. בנוסף, הגדרה באמצעות SDL מאפשרת בניית מנגנון יעיל לניטור התממשות התרחישים המוגדרים על פלטפורמות בדיקה שאינן סימולטיביות, וריכוזם במסגרת תוכנית וריפיקציה אחת.

דניאל מלץ,
מהנדס בכיר ב- Foretel
מה הרקע המקצועי שצריכים מהנדסים בסטארטאפ כמו Foretellix ובתעשיית האוטוטק בכלל?
אנחנו כותבים תוכנה ולכן קודם כל צריך רקע בתכנות, אבל צריך הבנה רב-מערכתית, כיוון שרכב אוטונומי זו מערכת שמשלבת המון תחומים: הפלטפורמה המכנית של הרכב עצמו, חיישנים ואלקטרוניקה, חומרה, למידת מכונה, בינה מלאכותית, וריפיקציה ואפילו רגולציה.
האם בסוף התהליך לא יהיו תאונות ברכבים אוטנומיים בכלל?
"לא ניתן למנוע לחלוטין תאונות ברכבים האוטונומיים, אבל כן אפשר לצמצם אותם באופן משמעותית בתנאי שנבצע כיסוי איכותי של מרחב תרחישי הפעולה של הרכב האוטונומי. התעשייה הזאת מאוד דינאמית והיום שבו יהיו פחות תאונות ברכבים אוטונומיים מאשר ברכבים רגילים מתקרב עם כל שנה שעוברת".




