Mark Elo, Giga Tronics
Mark Elo, Giga Tronics
יצירת תדר משתנה (agile) – כמה מהר אני יכול לכוונן?
החל מכיול מקלטים סלולריים ועד למשדרי לוחמה אלקטרונית בתדר משתנה, היכולת לעבור מתדר אחד לאחר ולהיקבע בתוך אמפליטודה ותדר מסוימים היא דרישת מפתח לגבי מחוללי אותות מיקרוגל. אך מה בעצם מגדיר את מהירות מיתוג התדר? איזה מרכיבים בדיאגרמה המלבנית תורמים לכך? מהי פשרת המפרט ביחס לבחירת הארכיטקטורה והטכנולוגיה? כדי שנוכל להשיב לכל השאלות הללו, ובתקווה ליצור עוד כמה נוספות, הבה נפרק את מחולל האותות שלנו לגורמים ונראה מה תורם ומדוע.
ראשית עלינו להגדיר מה הכוונה ב-“מהירות מיתוג התדר”. לצורכי מאמר זה, אנחנו נגדיר זאת בתור הזמן הדרוש כדי להעביר את תדר המוצא של מסנתז מתדר A לתדר B. בסופו של דבר, נפרט כמה אנחנו קרובים בהֵרצים לתדר הרצוי ותוך כמה dB’s של אמפליטודה נמצא המוצא של המקור רחוק מהאמפליטודה הרצויה המוחלטת.
שאלה: מדוע לא יכולים להיות אלה התדר והאמפליטודה הרצויים, מדוע עלינו לפרט את הפרמטרים ה”מסדירים” האלה?
אנחנו נלמד את התשובות בפרוטרוט תוך עיון במאמר זה, אולם לעת עתה התשובה הקצרה היא שכל מעגלי הדיוק של תדר ואמפליטודה משתמשים בסוג כלשהו של מנגנון סינון או משוב. מנגנונים אלה כוללים את קבועי הזמן הקשורים הנגרמים עקב השהיית הקבוצה של המסנן, טעינה/פריקה של רכיבים, פונקציות חשל (hysteresis), שונות (variance) טמפרטורה ומהירויות מיתוג אלקטרוני. כמובן שככל שיש פחות מעגלים אנלוגיים כך יהיה המכשיר מהיר יותר; קיימת שיטה דיגיטלית במלואה באמצעותה אנחנו יכולים להראות מדוע והיכן עובד ה-Direct Digital Synthesis
() והיכן הוא נמצא בהשוואה למחוללים אנלוגיים מבוססים על
VCO ()
ו- (YIG Tuned Oscillators).
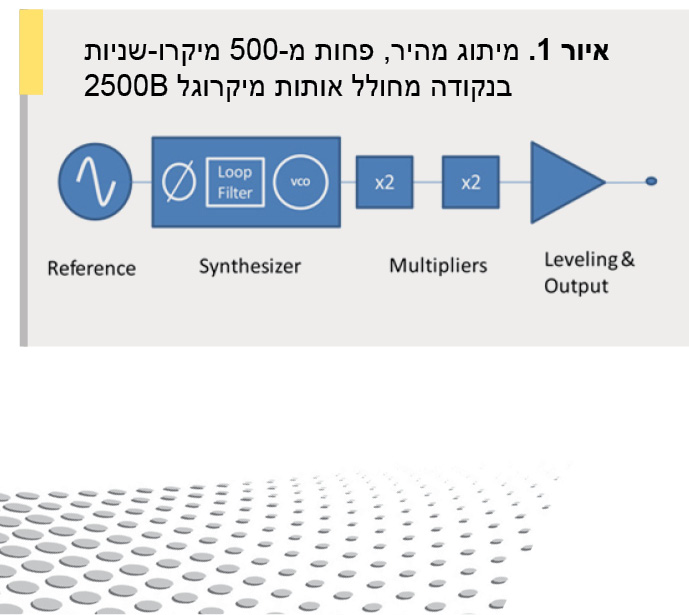
איור 1 מראה את הדיאגרמה המלבנית של מחולל אותות קונספטואלי. עיקרון הפעולה הוא פשוט: החל מהייחוס – הוא עושה מה שהוא אומר, ויוצר תדר ייחוס עבור המסנתז לשם השוואה כנגד או הכפלה (תלוי בסוג ארכיטקטור הסנתוז המשמשת). מרכיב המסנתז של הדיאגרמה המלבנית יוצר שורה של תדרים. לדוגמה מחוללי האותות מיקרוגל 2500B של Giga-tronics, המכונה מסנתז בלתי-ישיר (נוסיף על כך בהמשך), משתמש במה שאנחנו מכנים מחולל מכוון-YIG בעל תחום רחב של 4 עד 10 גיגה-הרץ. לאחר מכן שורות של מכפילים ממותגים מחוברים מספקות את התדרים הגבוהים יותר; לדוגמה 10 עד 20 גיגה-הרץ מיוצר על-ידי הכפלה ב-2, 20 עד 40 גיגה-הרץ ב-4 ו-40 עד 50 גיגה-הרץ ב-6. לבסוף, כדי להבטיח שהאמפליטודה מכוונת נכון קיימת דרגה של Output and Leveling, המשתמשת לעתים קרובות במעגל המכוון כיוון עדין את רמת האמפליטודה אוטומטית – המכונה ALC או Automatic Level Control.
הבה כעת ננתח את הדיאגרמה המלבנית ונראה כיצד כל אחד מהרכיבים תורם למהירות מיתוג התדר.
הייחוס
לא חשוב מה סוג הארכיטקטורה המשמשת, כל מחוללי האותות משתמשים בייחוס תדר. זהו התקן בעל תדר קבוע ומספק אות ייחוס מאוד יציב המשמש להפקת אותות המיקרוגל שאנחנו מבקשים לייצר. זהו מרכיב חיוני בדיאגרמה המלבנית ותורם עיקרי לסגירת רעש המופע (in phase) – אולם לצורכי מסמך זה אין לו השפעה על מהירות מיתוג התדר.
המסנתז
זהו לב המכשיר; כאן אנחנו מפיקים את מה שנכנה תדרי המיקרוגל היסודיים. קיימות בעיקרון שתי שיטות של ארכיטקטורה שניתן להשתמש בהן והמכונות לעתים קרובות שיטות הסנתוז הישיר והבלתי-ישיר.
1. סנתוז ישיר
קיימים כיום בשוק מספר מחוללים אנלוגיים בעלי סנתוז ישיר. הם מבצעים בדיוק מה שמפורסם עליהם ומבצעים סדרת פעולות אריתמטיות על האות מייחוס התדר כדי להשיג את תדר המוצא המבוקש. לגישת הסנתוז הישיר היתרון שהיא מאפשרת רזולוציה עדינה ומיתוג מהיר כמו גם אות מוצא נקי ספקטראלית. מאחר שסוג זה של מחוללים משתמש לרוב במספר רב של רכיבים, הם נוטים להיות יקרים ויש להם גם זמן ממוצע בין תקלות נמוך יותר מאשר בגישת הסנתוז הבלתי-ישיר.
לאחרונה התחלנו לראות את הופעת טכנולוגיית ה-Direct Digital technology
(). במונחים של מהירות, ה-DDS הוא הדרך המהירה ביותר לייצר תדר A, ולאחר מכן תדר B. בעולם מקורות המיקרוגל זוהי טכנולוגיה עתידית, המציעה מהירות כיוון מצוינת (מתחת למיקרו-שניות) בשילוב עם רעש מופע גדול. במונחים של מה הם האותות שניתן לייצר ובאיזו רמה של ניקיון ספקטראלי, טכנולוגיית ה-DDS מוגבלת כיום לתחום תדרים של גיגה-הרצים אחדים בעלי תוכן כוזב (spurious) גבוה. כך שכל יתרונות המהירות שניתן להפיק במסנתז, מרכיבים כמו גושים של מכפילים ממותגים מחוברים כדי להשיג תדרים גבוהים יותר (פירוט נוסף בהמשך) ומסננים המסייעים לניחות האותות הכוזבים שלהם תורמים להפחתה במהירות המיתוג הכוללת של המכשיר.
2. סנתוז בלתי-ישיר
רוב מחוללי האותות לתדרים גבוהים המוצעים בשוק כיום משתמשים
או ב-Voltage Controlled Oscillator
() או ב- YIG Tuned Oscillator () או בצירוף של שניהם. לטכנולוגיות ה-YTO וה-VCO יש יכולת מצוינת של יצירת תדר גבוה בשילוב עם ביצועים ספקטראליים מצוינים. במונחים של מהירות סוג זה של גישה יכול לספק אותות נקיים ביותר בעלי מהירויות מיתוג תדר בסדר גודל שמתחת למילי-שניות. שתי הטכנולוגיות הן מרכיבי-מפתח ומשתנים (variants) בארכיטקטורת ה-phased locked loop () המשמשת במעגלי סנתוז תדר רבים. הפעולה של PLL היא פשוטה ביסודה – דיוק התדר של המתנד – VCO או YTO הוא פונקציה של ההפרש בין האות המופק ואות הייחוס. אם אות הייחוס הוא 100 מגה-הרץ ואות המוצא המבוקש הוא 100 מגה-הרץ אזי השגיאה היא אפס, כלומר אפס שגיאה בהרץ ואפס שגיאת מופע. אם התדר הרצוי הוא 100 מגה-הרץ ומוצא המתנד הוא 100.1 מגה-הרץ, אזי יש לנו שגיאה של 0.1 מגה-הרץ, אשר תתורגם לשגיאת השוואת המופע; לבסוף לאחר הסינון שלו הוא יתורגם למתח תיקון. כמובן שהאות הרצוי הוא לעתים רחוקות אות הייחוס, כך שמשתמשים במעגל חלוקת תדרים כדי להקטין את תדר האות המופק לזה של תדר הייחוס, בתוספת, כמובן, של שגיאת התדר. כפי שאתם יכולים לראות, למנגנון המשוב המשמש יש זמן הקשור לכמה מהר ניתן להשיג את התדר הרצוי. סדרת ה-2500B של מחוללי אותות של Giga-tronics משתמשת בטכנולוגיה בעלת הפטנט של Accumulator High Frequency Feedbackk () כדי להבטיח שזמני המשוב נותרים מזעריים.
ל-VCOs בסוג זה של מעגלים יש מוניטין של שניים במרוץ המהירות אחרי ה-DDS. אולם ביצועי הרעש עשויים להיות גורם מגביל בעיקר במונחים של רעש מופע, כ-1 קילו-הרץ עד 1 מגה-הרץ. קיימות טכניקות המסוגלות להקטין זאת וקיימים מסנתזים בשוק בעלי רעש מופע נמוך דומה.
גישת המתנד המכוון YIG מאפשרת את הניקיון הספקטראלי הגבוה ביותר אולם יש לה מוניטין של איטית יותר מאשר גישת ה-VCO. אולם למכשירים דוגמת ה-2500B של Giga-tronics יש תכנון יחידי ביחס ל-YTO המשמש במסנתז. על-ידי הקטנת מספר הסיבובים בסליל ה-YIG הראשי והשימוש במתח גבוה כדי לגרום ל-EMF גבוה, מהירות הכוונון של המערכת ניתנת גם לשיפור דרמטי.
עד כה, למדנו שאם אנחנו יכולים לייצר תדר בתחום הגיגה-הרץ הנמוך תוך שימוש ב-DDS בעל מהירות מתחת למילי-שנייה, אך בעל תוכן כוזב גבוה, אזי ניתן להפיק תדרים יותר גבוהים ויותר נקיים ספקטראלית תוך שימוש ב-PLL ביחד עם VCO או YTO בעל מהירות מתחת למילי-שנייה. ל-VCO’s מוניטין של היותם יותר מהירים אך פחות נקיים ספקטראלית, בעוד ה-YTO’s ידועים בתור איטיים יותר אך בעלי ניקיון ספקטראלי מצוין. על-ידי חיפוש בפטנטים שונים, תוכלו למצוא טכניקות עבור מעגלי YTO מהירים (אחת הדוגמאות היא ה-2500B של Giga-tronics) ומעגלי VCO בעלי רעש מופע מצוין.
מכפילי תדר, מסננים ומעל לכל מתגים
נניח שנרצה להכפיל את האות 1 גיגה-הרץ DDS או 10 גיגה-הרץ YTO שלנו. כדי לעשות זאת נצטרך להשתמש במעגל הכפלת תדר. בעולם האנלוגי, הכפלת תדר מבוצעת לרוב על-ידי יצירת תדר הרמוני על-ידי היישור, או במקרים מסוימים, העיוות של האות; שתי השיטות דורשות מסנן מעביר-פס (או מערך מסננים) כדי לצמצם הכל חוץ מהתדר ההרמוני הרצוי. מרכיבי הזמן הגדולים ביותר הבאים כאן בחשבון הם שמכפילים ומסננים ממורבים (multiplexed) לרוב בעזרת מתגים. לכל מתג יש זמן הקשור הן למעגל הדוחף (driver) שבשימוש והן במעגל המשוב. אם המתג הוא אלקטרוני אזי ניתן להזניח את התזמון (נומר עשרות ננו-שניות); אולם יש לנהל מתג זה, כלומר לקבוע אותו עם הכיוון והקביעה של ה-PLL, או זמן המעבר מקביעת מילת התדר עד ליצירה הממשית של האות ב-DDS.
דרגת המוצא
דיוק אמפליטודה מוחלט עשוי להיות מכריע, במיוחד אם אתה משתמש במחולל אותות לכיול השטיחות (flatness) של מקלט. אולם שמירה על דיוק אמפליטודה מוחלט בתוך תחום של תנאי פעולה שונים במהלך הזמן דורש לולאת משוב כדי למדוד את האמפליטודה הממשית ולתקן עבור האמפליטודה הרצויה. כמו ב-PLL, זוהי פעולה אחרת בתוך המכשיר העשויה להוסיף השהיות תזמון נוספות. מכשירים רבים מציעים אופציה לא להשתמש ב-ALC, דבר אפשרי אם המחולל אינו משמש לכיוון מקלט או אם ניתן לשלוט על הטמפרטורה.
שיקולי בקרה
אנחנו יכולים לחלק זאת לשני סוגי מהירות – מהירות דטרמיניסטית, כלומר אנחנו יודעים מהי המהירות המוחלטת של ההעברה, ולא-דטרמיניסטית, כלומר כאשר המהירות תשתנה על-פי גורמים אחרים לדוגמה כמה מכשירים מתחלקים על ממשק הבקרה. LAN ו-PCI (בשימוש במכשור PXI) הם דוגמאות של האחרון מאחר והם נתמכים על-ידי ממשק טורי. כדי להתגבר על חסרונות מהירות הממשק, למכשירים רבים יש יכולת לתכנת סט הוראות בתוך המכשיר; אלה נקראים לעתים רשימות. הרשימה המאוכסנת בתוך המכשיר תכיל רשימת תדרים ואמפליטודות לדוגמה; כל מרכיב ברשימה ניתן להגדלה הן על-ידי הגדרת זמן השהות (dwell time) עבור מרכיב רשימה בודד, או על-ידי הגדלת הרשימה בעזרת דרבון (trigger) חיצוני. סדרת המכשירים 2500B מצוידת במרכיב תוכנה נוח לשימוש המכונה Automation Express כדי להקל על יצירת הרשימות. מסנתזי תדר ישירים מהירים משתמשים בממשקים דטרמיניסטיים ביותר, מאחר שלעתים התדר הבא אליו חייב המכשיר להתכוונן עשוי להיות בלתי ידוע.
סיכום: צוואר-הבקבוק הנע:
במכשירים איכותיים מקובלים, צוואר-הבקבוק הוא כיום המסנתז. בשעה שטכנולוגיית ה-DDS מבשילה, אנחנו יכולים לראות שצוואר-הבקבוק נע מהמסנתז עצמו אל המתגים הבוחרים את המכפילים, ואפילו, במקרים קיצוניים אחדים, אל השהיית הקבוצה של המסננים. כמו בכל בעיה הנדסית, אנחנו ניצבים בפני מספר דרכים לפתור את הבעיה, כאשר לכל אחת מהן צירוף ספציפי של פשרות. טכנולוגיית ה-DDS, בעוד היא מהירה ביותר, דורשת סינון והכפלה במספר רב של דרגות, שלא רק מכניסות הפסדי מיתוג נוספים לאורך הפסים, אלא גם הפחתה ברעש המופע עבור כל אחת מההכפלות. סוסי העבודה של התעשייה כיום הם מסנתזים מבוססי YTO או YIG, המציעים זמני מיתוג מתחת למילי-שנייה וניקיון ספקטראלי מצוין. לבסוף, ללא תלות בגישת המסנתז בה בוחר המכשיר, אל תשכח לקחת בחשבון את שני צווארי-הבקבוק הסופיים: (1) מעגל המוצא הדרוש עבור דיוק אמפליטודה מוחלט, ו-(2) קביעת הבחירה הטובה ביותר על שיטת הבקרה של המכשיר: או על-ידי שימוש בבקרה ישירה דרך LAN או PCIe, או על-ידי שימוש ברשימה פנימית.
Related Info
• Datasheet – 2500B Microwave Signal Generators
• White Paper – Introduction to Phase Noise in Signal Generators
• App Note – Ten Things About Giga-tronics 2500B Microwave Signal Generators
• App Note – Phase Noise and its Changing Role in Radar Design and Test
• App Note – ESM Calibration and Testing Using the Giga-tronics 2500B Series Microwave Signal Generators
• Configuration Guide – 2500B Series Microwave Signal Generators
• Brochure – 2500B Microwave Signal Generators
• Catalog – Giga-tronics Instrumentation Short-form Catalog
Quote Request
• Find Your Local Giga-tronics Representative
• Submit a Quote Request
• Contact Us
Related Forms
• Sign up for Newsletter
• Get your free Doppler Phase Noise Poster
• Radar Reference eBook