
 חוקרים השתמשו בטכנולוגיות Xilinx לפיתוח של מערכת ניווט שעובדת במקומות בהם GPS רגיל אינו מתפקד
חוקרים השתמשו בטכנולוגיות Xilinx לפיתוח של מערכת ניווט שעובדת במקומות בהם GPS רגיל אינו מתפקד
מאת: ז’אק גרגורי
ה-GPS היא מערכת ניווט מבוססת לווין המשרתת מגוון רחב של יישומי ניווט. תחת שמים פתוחים יכול ה-GPS לספק פתרון ניווט מדויק. הבעיה מתחילה כשמדובר בקניונים עירוניים, במנהרות ובמבנים סגורים החוסמים את אותות הלווין ומפריעים ל-GPS לספק כיסוי רציף ואמין.
בחיפוש אחר פתרון ניווט ומיקום מדויק וזול יותר עבור אזורים שאינם מתאימים ל-GPS החלו החוקרים לפתח אלגוריתמי ניווט משולבים המשתמשים במדדים הלקוחים מחיישנים זולים כמו מדי תאוצה. ג’ירוסקופים, מדי מהירות, ברומטרים ואחרים, ומשלבים אותם עם מדדים הלקוחים ממקלט ה-GPS. השילוב הזה מושג באמצעות מסנן קלמן (KF), מסנן חלקיקים או טכניקות של בינה מלאכותית.
מרגע שאלגוריתם הניווט החדש פותח, אומת והוכח כראוי, המטרה האולטימטיבית היא לשלב אותו במערכת משובצת זולה הפועלת בזמן אמת. מערכת כזו חייבת לאסוף ולסנכרן את המדדים מהחיישנים השונים ולאחר מכן ליישם את אלגוריתם הניווט באופן המשלב את המדדים השונים ומפיק פתרון זמן אמת בקצב מוגדר.
המעבר של האלגוריתמים משלב המחקר לשלב המימוש הוא צעד קריטי בהערכת המעשיות והיעילות של כל אלגוריתם ניווט חדש, וכתוצאה מכך, של המערכת המשובצת שפותחה, בין אם זה לצורך הוכחת התפיסה ובין אם זה כדי להתקבל כמוצר צריכה. בתהליך המעבר הזה לא קיימת מתודולוגיה ספציפית שעל פיה יכולים המתכננים לפעול כדי ליצור מערכת משובצת. מתכנני המערכת ייאלצו להשתמש במתודולוגיות שונות כדי לפתח את המוצר הסופי בהתאם לפלטפורמה הנבחרת – שיכולה להיות מיקרו בקר, מעבד אותות דיגיטלי ו-FPGA.
MICROBLAZE בחזית
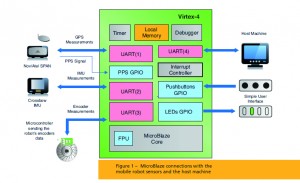
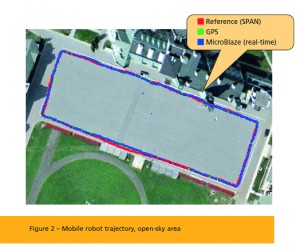
במחקר שנערך באוניברסיטת קינגסטון, אונטריו, השתמשנו במעבד soft-core מסוג Xilinx® MicroBlaze® שנבנה על ערכת האבלואציה ML402 וכולל Virtex®-4 SX35 FPGA. אלגוריתם הניווט שיושם הוא אלגוריתם אינטגרציה מסוג 2D GPS/RISS המשלב מדדים הלקוחים מג’ירוסקופ וממד מרחק ברכב או ממערכת ההיגוי, ביחד עם מדדים הלקוחים ממקלט GPS. באופן כזה מחשב האלגוריתם פתרון ניווט משולב מדויק יותר מזה של GPS לבדו. עבור רכב שנע על משטח דו מימדי הוא מחשב חמישה מצבי ניווט: קווי אורך, קווי רוחב, מדדי מהירות, ואזימוט. אלגוריתם אינטגרציה מסוג 2D RISS/GPS כולל שני שלבים: מכניזציה מסוג RISS ומיזוג של נתוני RISSGPS באמצעות מסנן Kalman. מכניזציה של RISS היא התהליך של הפיכת מדידות מתצורת RISS לנתוני מקום, מהירות וכיוון בתצורה גנרית. זהו תהליך רקורסיבי שניתן על בסיס המדידות החדשות מול נתוני התחלה. אנו מקיימים את המיזוג של נתוני המיקום והמהירות מה-GPS עם נתוני ה-RISS בשיטת KF קונבנציונאלית. מעבד soft-core כדוגמת ה-MicroBlaze מספק יתרונות רבים בהשוואה למעבדים מוכנים לשימוש “מהמדף” בפיתוח מערכות ניווט רב-חיישניות ניידות, ביניהם היתרונות של יכולת התאמה אישית, היכולת לתכנן מערכת מרובת מעבדים והאצת החומרה.
עם התקן soft-core נהנים המתכננים של מערכות מעבדים משובצות מבוססות FPGA מהגמישות המלאה להוסיף כל שילוב רצוי וייחודי של התקנים היקפיים ובקרים. ניתן גם לתכנן מערך ייחודי של התקנים היקפיים עבור יישומים ספציפיים ולהוסיף כמה התקנים היקפיים שנדרשים כדי לעמוד בדרישותיה של מערכת היעד הספציפית.
יתרה מכך, מערכות משובצות מורכבות יותר יכולות לצאת נשכרות מקיומם של כמה מעבדים המסוגלים לבצע את המשימות באורח מקבילי. השימוש במעבד soft-core ובכלים הנלווים מקל מאוד על היצירה של מערכת על-גבי שבב מבוססת ריבוי מעבדים. המגבלה היחידה למספר המעבדים שניתן להוסיף היא הזמינות של משאבי FPGA.
ולבסוף, אחת הסיבות העיקריות לבחירת מעבד soft-core היא היכולת לפתח בו-זמנית חומרה ותוכנה שחיות בדו-קיום על שבב יחיד. מתכנני מערכות אינם צריכים לדאוג שמא סגמנט של האלגוריתם יתגלה כצוואר בקבוק. כל שעליכם לעשות כדי להימנע מבעיה כזו הוא לתכנן מעבד משותף בהתאמה אישית או מעגל חומרה המנצל את המקביליות של ה-FPGA.
ממשקים ואריתמטיקה לצורך הפיתוח של מערכת הניווט במחקר המוזכר לעיל היינו זקוקים בעיקר למערכת המסוגלת להתממשק עם שלושה חיישנים ומחשב אישי באמצעות לא יותר מארבע כניסות טוריות, שכל אחת מהן מצריכה רכיב UART (משדר מקלט אסינכרוני אוניברסלי). כבר בשלבי הפיתוח, התבצעה בדיקה ראשונה של מערכת הניווט באמצעות רובוט נייד על מנת לגלות באגים ובעיות של אינטגרציה, ורק לאחר מכן המערכת עברה לבדיקות נוספות באמצעות רכב סטנדרטי.
 השימוש במעבד soft-core כדוגמת ה-MicroBlaze במערכת ניווט ניידת המורכבת מחיישנים שונים מספק את הגמישות לתקשר עם כל מספר של חיישנים המשתמשים בממשקים שונים, וזאת מבלי לדאוג באשר לזמינותם של ההתקנים ההיקפיים מראש כפי שהיינו נאלצים לעשות לו השתמשנו במעבדים מוכנים לשימוש “מהמדף”. במונחים של מחשוב, המתכננים יכולים לבנות את אלגוריתם הניווט תוך שימוש בתוכנה משובצת המשתמשת ב-FPU מדויקת אחת הזמינה בתוך ה-MicroBlaze, בדיוק כפי שנעשה במחקר המתואר כאן. ניתן גם לבצע חציצה של התכנון בין תוכנה לחומרה באמצעות יישום של הסגמנטים של האלגוריתם שהתגלו כצווארי בקבוק כמעבד משותף בהתאמה אישית או כמעגל חומרה המאיץ את האלגוריתם.
השימוש במעבד soft-core כדוגמת ה-MicroBlaze במערכת ניווט ניידת המורכבת מחיישנים שונים מספק את הגמישות לתקשר עם כל מספר של חיישנים המשתמשים בממשקים שונים, וזאת מבלי לדאוג באשר לזמינותם של ההתקנים ההיקפיים מראש כפי שהיינו נאלצים לעשות לו השתמשנו במעבדים מוכנים לשימוש “מהמדף”. במונחים של מחשוב, המתכננים יכולים לבנות את אלגוריתם הניווט תוך שימוש בתוכנה משובצת המשתמשת ב-FPU מדויקת אחת הזמינה בתוך ה-MicroBlaze, בדיוק כפי שנעשה במחקר המתואר כאן. ניתן גם לבצע חציצה של התכנון בין תוכנה לחומרה באמצעות יישום של הסגמנטים של האלגוריתם שהתגלו כצווארי בקבוק כמעבד משותף בהתאמה אישית או כמעגל חומרה המאיץ את האלגוריתם.
העתיד של מחקר זה יכול להיות בשילוב של אלגוריתמים לניווט שהם עוצמתיים יותר ומאתגרים יותר ועושים שימוש ביותר שבבים ובכלי בינה מלאכותית, שמסתייעים בכוח של האצת חומרה ו-multiprocessing.
המאמר התפרסם במגזין Xcell Journal של חברת Xilinx
והוא מבוסס על עבודת מחקר של החוקרים:
וליד פריד עבד אלפתאח עוזר מחקר לתחום ניווט באוניברסיטת קווינס
ז’אק גרגורי, מהנדס עיצוב אלגוריתם בחברת Trusted Positioning
ואבומג’יד נור אלדין, פרופ’ באוניברסיטת קווינס ומרצה בקולג’ הצבאי המלכותי הקנדי