




עידן המכוניות האוטונומיות הולך ומתקרב כאשר על פי הערכות מומחים אנו עומדים מרחק של 5 שנים מהיום בו ינועו על הכבישים עשרות או מאות אלפי מכוניות ללא נהג.
תקציר
מה חלקם של רכיבי הבטיחות המכוסים מבחינה כלכלית בבדיקה פיזית של רכב אוטונומי? כמה ממרחבי הבטיחות יכסו 1,000,000 קילומטרים של נהיגה אוטונומית? מגבלות בדיקות פיזיות הן תוצר של עיצוב ומצב כלי הרכב; פציעה ומוות מתרחישים מכוונים; זיהום; תנאי מיקום, כביש ומזג אוויר; ומצב של נהגים והולכי רגל. המגבלות שהוטלו בתרחיש בדיקה מדומה באמצעות מודלים מאופיינים באיכות גבוהה הן אלה של מדעי החיים, הכוללים פיסיקה וכימיה. האתגר הגדול הוא: עמידה בפני תקלות לשליטה אוטונומית ומניעת השתלטות עויינת מרחוק על כלי רכב אוטונומיים. התשומות לחישוב בטיחות כוללות: (1) שיעור הכישלון הצפוי של שליטה בחומרה בדידה, רכיבי תקשורת ומקור אנרגיה (חשמלי, הידראולי, מכאני ותרמודינמי), מערכות ותת מערכות ומה התוצאה מכשלים פיזיים והשפעתם יהיו; (2) ההתפלגות הצפויה של שגיאות קוד ותקשורת; ההתפלגות הצפויה של שגיאות דינמיות במצבור, זיכרון וזיכרון פלאש הגורמים לשגיאות אקראיות בקוד תוכנה בינארי (3); וכן (4) התפלגות השינויים הצפויים לאורך זמן ועד מה הוא גבול מספר השנים הרצוי למערכות מתפקדות באופן רציף.
 תקשורת יעודית קצרת טווח (DSRC)
תקשורת יעודית קצרת טווח (DSRC)
מה הבעיה עם מערכות תקשורת יעודית קצרת טווח? שלושה נושאים עיקריים מרכיבים סוגיה זו (1) גודש בערוצים האלחוטיים. גודש ערוץ גורם לחוסר היכולת של כלי רכב אפילו קרובים לתקשר באמצעות Wi-Fi ל-10-30 שניות. עם הסטנדרטים הנוכחיים, ברדיוס של כ-500 מטרים, 100 כלי רכב עשויים "להידחף" אל הערוצים האלחוטיים הזמינים. (2) הרגישות של תקשורת רדיו לרעש EM יבשתי. (3) הרגישות של תקשורת רדיו לרעש EM באטמוספירה. חוסר היכולת לתקשר לטווח של 10-30 שניות היא מסוכנת למדי. לכן, להישען על תקשורת יעודית קצרת טווח כפיתרון יחיד או העיקרי באמצעות חיישן להימנעות מהתנגשות הוא בלתי מתקבל על הדעת. פיתרון כזה חייב להיות בשילוב עם לפחות שני חיישנים אחרים – וידאו בתוספת LIDAR או מכ"מים זעירים בתדרים שונים – וכך להפוך את בטיחות הנסיעה האוטונומית לשחקן מרכזי בפיתוח.
מערכות למניעת שיבוש נווט ברכב קיימים כבר בשוק. היישום לצרכים צבאיים ותעופתיים ממשיק כיום לצרכים אזרחיים. מערכות אלו הינם כלי מהותי ביותר באבטחת פעילותו של הרכב האוטונומי. שיבוש תדרים הינו יעד של לא מעט גורמים עויינים ובא לידי ביטוי בעולם הטלפוניה, הנווט ומערכות אלקטרוניות ותקשורת ברכב. ולכן, הרכב האוטונומי העתידי האולטימטיבי נדרש יהא למערכות מסוג זה, מה שהופך את אינטגרציית המערכות הטכנולוגיות השונות ברכב לאתגר מהותי מאוד בהפיכתו של הרכב האוטונומי לזמין.
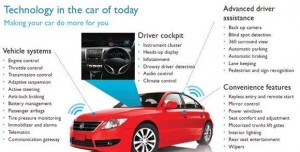
 ההערכה היא שעד לשנת 2020, כל רכב מערבי יהא מצוייד במערכת למניעת התנגשות, זאת בשילוב מערכות מולטימדיה ברכב, תקשורת אלחוטית, נווט מובנה, מצלמות היקפיות וטלפוניה. מורכבות זו היא אתגר עצום בו יש למצוא ולהתקין פתרונות אשר יהוו מחולל הטמעה בין המערכות השונות המשתמשות בדומיינים שונים בכדי למנוע שיבוש מערכות והשתלטות מרחוק על רכב אוטונומי ואולי בסופו של דבר, נכון הוא לא להפוך את רעיון הרכב האוטונומי למציאותי ואולי אף מקדים את זמנו.
ההערכה היא שעד לשנת 2020, כל רכב מערבי יהא מצוייד במערכת למניעת התנגשות, זאת בשילוב מערכות מולטימדיה ברכב, תקשורת אלחוטית, נווט מובנה, מצלמות היקפיות וטלפוניה. מורכבות זו היא אתגר עצום בו יש למצוא ולהתקין פתרונות אשר יהוו מחולל הטמעה בין המערכות השונות המשתמשות בדומיינים שונים בכדי למנוע שיבוש מערכות והשתלטות מרחוק על רכב אוטונומי ואולי בסופו של דבר, נכון הוא לא להפוך את רעיון הרכב האוטונומי למציאותי ואולי אף מקדים את זמנו.
הוכחת העתיד
רוב הדיונים על עדכוני תוכנת רכב היו מוגבלים לתיקוני באגים, הימנעות מקריאה חוזרת לביצוע תיקונים בטיחותיים ותיקוני אבטחה. עם זאת, תוכנה המספקת כל כך הרבה יתרונות לביצועי הרכב, עדכוני תוכנה עשויים להעניק לתעשיית הרכב, קפיצת מדרגה וגמישות רבה שעדיין לא ממושו במלואם. הזדמנות אחת המובנת מאליה היא בתכנון והטמעה של תוכנה חדשה וחדשנית אשר תשרת את הרכב לכל מחזור חייו.
המכונית מוגדרת התוכנה גם מאפשרת ליצרני המכוניות להגיב בזמן אמת ללקוחות שלהם. יצרני ציוד מקורי יכולים לגשת לנתוני אבחון אנונימי, המאפשר להם לראות 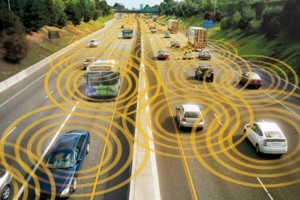 ולבחון את מאפייני השימוש במכוניות שלהם. גישה כזו יכולה להזין תהליך שיפור מתמיד לשביעות רצון הלקוחות. בדיוק כמו עדכוני יישום נעשים כיום, עדכוני תוכנת רכב עשויים להפחית את מרחב תלונות הלקוחות על פני ציר זמן מתגלגל ולהוסיף אפשרויות חדשות והחשוב ביותר, לייצר תשתית ללקוחות מרוצים ולאורך זמן.
ולבחון את מאפייני השימוש במכוניות שלהם. גישה כזו יכולה להזין תהליך שיפור מתמיד לשביעות רצון הלקוחות. בדיוק כמו עדכוני יישום נעשים כיום, עדכוני תוכנת רכב עשויים להפחית את מרחב תלונות הלקוחות על פני ציר זמן מתגלגל ולהוסיף אפשרויות חדשות והחשוב ביותר, לייצר תשתית ללקוחות מרוצים ולאורך זמן.
המכונית מוגדרת התוכנה חייבת לשלב מומחיות עמוקה בעולם הרכב, אבטחת עדכונים ללא צורך במגע פיזי עם הרכב, בטיחות היקפית למשתמש, וגישה זמינה לאבחון בכדי לאפשר שיפורים בתהליך והמוצר באמצעות תוכנה אמינה ברת עדכון.
רמות רכב אוטונומי
רמת 1 – פונקציה ספציפית:
אוטומציה של פונקציות בקרה ספציפיות, כגון בקרת שיוט, התראת מרכוז נתיב וחניה מקבילה אוטומטית. נהגים מעורבים באופן מלא ואחראי (ידיים על ההגה ורגל על הדוושה בכל עת)
רמה 2 – אוטומציה בשילוב פונקציה: אוטומציה של פונקציות שליטה מרובות ומשולבות, כגון בקרת שיוט אדפטיבית עם מרכוז נתיב. נהגים אחראים לניטור הכביש וצפוי להיות זמין לשליטה בכל עת, אך בתנאים מסוימים קיימת אפשרות להתנתק מהפעלה רציפה של הרכב (הסרת ידיים מההגה והסרת הרגל מהדוושה בו זמנית)
 רמה 3 – אוטומציה עצמית נהיגה מוגבלת: נהגים יכולים לוותר על כל הפונקציות הקריטיות לבטיחות בתנאים מסוימים ולהסתמך על תפקוד עצמאי של הרכב כדי לפקח על שינויים באותם תנאים שדורשים מעבר חזרה לשליטת הנהג. נהגים לא נדרשים לפקוח עין על הכביש בכל עת.
רמה 3 – אוטומציה עצמית נהיגה מוגבלת: נהגים יכולים לוותר על כל הפונקציות הקריטיות לבטיחות בתנאים מסוימים ולהסתמך על תפקוד עצמאי של הרכב כדי לפקח על שינויים באותם תנאים שדורשים מעבר חזרה לשליטת הנהג. נהגים לא נדרשים לפקוח עין על הכביש בכל עת.
רמה 4 – אוטומציה בנהיגה עצמית מלאה: כלי הרכב יכול לבצע את כל פונקציות הנהיגה ולעקוב אחר תנאי הכביש והסביבה התעבורתית, כולל תקשורת בין כלי רכב נוסעים. רמה כזו תאפשר הפעלת הרכב ע"י רובוטים ונהגים מוגבלים פיזית לנהיגה. נהיגה עצמית וחבות יצרן במקרה של תאונה – באם תאונה תתרחש עקב פגם, תקלה או כשל של מערכת הבקרה האוטומטית לנהיגה העצמית, ההשלכות והעלויות עשויות להיות די משמעותיות. באם נהג הגיבוי לא יצליח להשתלט על תפעול ידני של הרכב כנדרש בעת נהיגה עצמית, תוך התחשבות וביטוי לכל התנאים הנדרשים לכך, הדבר עשוי לגרום להליכים משפטיים משמעותיים ביותר וחמור יהא הדבר באם תתבצע השתלטות עויינת על הרכב אשר במכוון תגרום לתאונה. בכל מקרה ועל מנת להעמיד תנאי ביטוח מספקים, יש לדרוש שתמיד יימצא נהג חליפי ברכב אשר ידע בבוא העת לתת מענה לכל תקלה בשליטה העצמית של הרכב וכמובן, לבצע סדר פעולות תגובה באם קיים חשש להשתלטות עויינת על הרכב.
