




מידול דינמי של רובוטים הוא מתודולוגיה מוכרת בחוגים אקדמיים מזה שנים רבות. הוא משמש בדרך כלל ככלי במעבדות למחקר ולפיתוח של רובוטים דמויי אדם, הדמיות תנועה ותחומי מחקר אקדמיים אחרים. המידול הדינמי כרוך בפיתוח של נוסחאות מתמטיות המתארות את תכונותיו הדינמיות של הרובוט – אינרציה, מסה, מרכז

בקרי התנועה הרב ציריים של סרווטרוניקס, softMC 3 מימין ו-softMC 7 משמאל, עם בקרה מבוססת מודל בתקשורת EtherCAT בזמן אמת
מסה ומאפיינים אחרים שאינם ניתנים למדידה בקלות. למרות שכיחותו במחקר התיאורטי, יצרני רובוטים תעשייתיים התעלמו עד כה כמעט לגמרי מאפשרות היישום של מידול דינמי לצורך שיפור הבקרה הרובוטית. סרווטרוניקס בחנה לראשונה את הפוטנציאל הטמון במידול דינמי כדי לפתור בעיות ביצועים ברובוטים מהירים מסוג דלתא בתעשיית המוליכים למחצה. עבור רובוט דלתא בפס ייצור של תאים סולרים נדרשו כושר האצה גבוה ודיוק רב ביותר. אולם המבנה השביר של הרובוט חשף אותו לסכנות שבירה והתנגשות עם המטענים עצמם ועם חומרי ייצור יקרים. הקינמטיקה של הדלתא מבוססת על מקביליות מכאניות המחוברות אל המסוע ואל חוליות הזרוע באמצעות מפרקים כדוריים. במקרה של התנגשות או רעידה חזקה, עקב חריגה במיקום או בזווית, לא נדרש כוח רב כדי לגרום לשבר ברובוט, והרובוט אף עלול

מידול דינמי מיושם על ה-Galileo Sphere Robot Light () בעל 5 הצירים
להתפרק. תרחיש זה מסתבך עוד יותר כאשר הזרוע נמצאת לפנים, מצב בו הסיכון לפגיעה במכשול גבוה יותר. אם הפגיעה אינה מתגלה מייד לאחר שהרובוט נשבר הסיכון לנזק נוסף רק גדל. כדי להתגבר על חסרונות אלו ולספק בקרה טובה יותר של רובוט הדלתא אימצו והרחיבו המהנדסים של החברה מודל דינמי ששורשיו נעוצים במחקר האקדמי. המודל שהתקבל הוא מודל גנרי, והוא רק חצי הסיפור.
כחלק מהמודל הגנרי, ערכי הפרמטרים שונים מרובוט לרובוט מכיוון שלרובוטים ישנם מידות ומסות שונות. אף על פי שהקינמטיקה של הרובוטים זהה, התכונות הפיזיות שלהם שונות. אפילו ברובוטים מייצור סדרתי התכונות הפיזיות של כל רובוט עשויות להיות שונות מעט ולהשפיע באופן שונה על תפקודו.
לאחר המידול של המערכת הרובוטית יש למצוא את הערכים המדויקים של הפרמטרים הדינמיים. החברה עשתה זאת על ידי פיתוח אלגוריתמים נוספים ותהליך זיהוי אוטומטי של פרמטרים קינמטיים ודינמיים. בעוד שפרמטרים מסוימים, כגון המידות הגיאומטריות של חוליות הזרוע הרובוטית, קלים למדידה ולהצבה בנוסחה, פרמטרים אחרים, כגון מרכז המסה של כל חוליה, נקבעים בתהליך הזיהוי האוטומטי. במהלך הזיהוי האוטומטי הרובוט נע באופן אקראי והערכים של הפרמטרים הדינמיים נקבעים על ידי אלגוריתמי הזיהוי של החברה. לצורך החישוב נלקחים בחשבון הן גורמים פנימיים והן גורמים חיצוניים – כגון צורה, חומר, כבלים, וחיכוך. בעקבות התהליך שהושג ובקרה מבוססת המודל של רובוטי דלתא, פיתחה החברה מודלים דינמיים עבור סוגים אחרים של רובוטים, כגון רובוטים מסוג SCARA, רובוטים בעלי זרוע 4

רובוט הדלתא בעל מבנה שביר, ובמהירויות גבוהות עלול לפגוע בעצמו ובמטען שלו
צירים, ורובוט ה-Galileo Sphere Robot Light בעל 5 הצירים. החברה הגיעה למסקנה כי באמצעות מידול דינמי ניתן לענות על הביקוש ההולך וגובר לתפוקה גבוהה יותר, מהירויות גבוהות יותר ועלויות נמוכות יותר.
באמצעות מודלים דינמיים השיגו לקוחותיה של החברה זמני התייצבות מהירים יותר ובקרת מעקב מסלול טובה יותר. יתרון נוסף הוא היכולת לזהות בלאי במערכת בעקבות שינויים בפרמטרים המכאניים לאורך זמן, במיוחד בקיבוע החיכוך. בקרה מבוססת מודל היא כיום תכונה מובנית של הבקר הרב-צירי softMC של החברה. יעילותה מושגת בסופו של דבר באמצעות תקשורת בזמן אמת. באמצעות EtherCAT, בקר ה-softMC מעדכן ערכי הדרייב בכל מילי-שנייה. בכל דגימה ה-softMC שולח ומקבל מהדרייב פקודות ומשוב של ערכי מומנט פיתול, לצד ערכי מיקום ומהירות. ה-softMC משולב בדרך כלל עם בקר הסרוו CDHD של החברה, וניתן להתאים אותו לקבלת מומנט פיתול כערך נוסף על מומנט הפיתול המחושב פנימית. היתרון המיידי של בקרה מבוססת מודל, כפי שמראה המקרה של רובוט הדלתא, הוא זיהוי ומניעה של
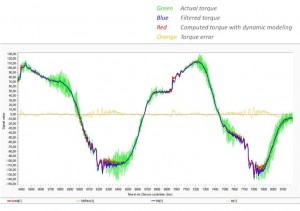
ערכי מומנט הפיתול המחושבים מנבאים כמעט במדויק את מומנט הפיתול המסונן כפי שהוא מצוין על ידי טעות מומנט הפיתול
התנגשות. המטען וסביבת העבודה, כמו גם המפעילים האנושיים, מוגנים יותר. כמו כן, אין עוד צורך בחיישני כוח, דבר המפשט את המערכת ומוזיל עלויות. אולם היתרון המשמעותי ביותר של שיטת בקרה זו הוא פעילות רובוטית וביצועי דרייב טובים יותר. הניתוב מדויק יותר משום שמומנט הפיתול הנדרש כדי להגיע למיקומים השונים ניתן לחישוב מדוייק. הזרם הנדרש חלק יותר משום שהוא מחושב ולא פשוט מתקבל על ידי חוג המשוב, ובכך מושגת בקרה מהירה יותר ופחות רעידות וקפיצות.
הערכה של מומנט הפיתול והכוחות הפועלים על הרובוט בעת תנועתו ומניעת מומנט פיתול מיותר מאפשרים להגביר את מהירות הרובוט בקלות ובבטחה, ובו בזמן להפחית תנודות וזמני התייצבות. התוצאה הסופית של בקרה מבוססת מודל היא מערכות רובוטיות הנעות מהר יותר ומדויק יותר ובעלות תפוקה רבה יותר.
מירקו בוריץ', מנהל פרויקט
softMC Motion Controller,
סרווטרוניקס בקרת הנע




