




בנייה מסביב לחיישנים תעשייתיים חכמים רגישים למיקום מסייעת להעלות את איכות ודיוק המדע הנאסף, וגורם לאוטומציה של המכונות הרבה יותר יעילה.
האוטומציה של מכונות תעשייתיות, בין אם מדובר בייצור, חקלאות, לוגיסטיקה, אנרגיה, רכב או מל"טים, מבטיחה רווחים גדולים ביעילות המשאבים, דיוק הציוד והאבטחה. המפתח לניצול רווחים אלה הוא זיהוי טכנולוגיות החישנים המתאימות לשם תגבור הידע הקונטקסטואלי של מצב הציוד.
מאחר שהמיקום או המצב של הציוד הוא גם מבוא ערכי של המשוואה, חיישנים אינרציאליים מדויקים מקיימים את ההבטחה של קביעת המיקום המדויק או קיום המצב המדויק. חיבור של המיקום והמידע הקונטקסטואלי של החיישן הוא בעל ערך משמעותי ביישומים בהם הניידות מהווה גורם.
במצביים רבים, קביעת המיקום תוך פעולה בסביבה מורכבת או קשה היא בעלת ערך קריטי במיוחד.
ל-(Internet of Moving Things (IoMT יש הרבה אתגרים בדרך לרווחי יעילות גדולים, וחיישנים אינרציאליים איכותיים מסייעים ליצור את ההבדל.
החיישנים מניעים את האוטומציה של המכונות
בשעה שהמכונות התפתחו מביצוע מדידות פסיביות פשוטות להכלת פונקציות בקרה מוטבעות ועתה גם לפעולה אוטונומית מלאה, חיישנים משחקים תפקיד חשוב. אם במדידה פשוטה התומכת בניתוח לא-מקוון, או לשם בקרת תהליך, רבים מהחיישנים הללו פעלו במידה מספקת תוך בידוד.
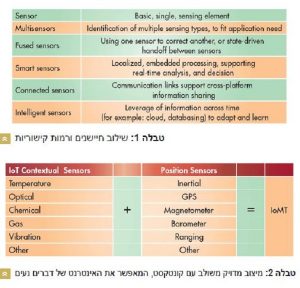
הרצון להפיק יתרונות בזמן-אמת, ונוכחות של מגוון גדל של סוגי חישה ועיבוד יעיל, גרמן להתקדמויות חשובות במיזוג החיישנים כדי ליצור בצורה הטובה ביותר את הקשר בין מצבי יישום/סביבה מרובים. לבסוף, במערכות מורכבות הכוללות קשר בין פלטפורמות מרובות, והדורשות ידע על מצבי מערכת בעבר, ההתקדמויות בקישוריות תומכות במערכות חיישנים יותר ויותר חכמות (טבלה 1).
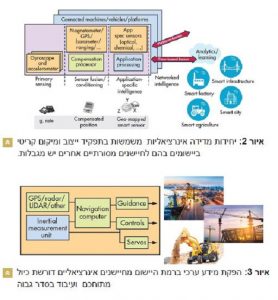
מערכות חישה חכמות ונגישות אלו גורמות למהפכה במה שהיו אחרת תעשיות בוגרות, בהופכן את החקלאות לחקלאות חכמה, תשתית לתשתית חכמה וערים לערים חכמות. בשעה שחיישנים מוצבים לשם קבלת מידע קונטקסטואלי בסביבות, מורכבויות חדשות מופיעות בניהול בסיס הנתונים ובתקשורת, תוך דרישה של חיבור מתוחכם לא רק בין חיישן לחיישן, אלא גם בין פלטפורמות וזמנים (דוגמאות כוללות הניתוח מבוסס הענן של מצב התשתית לאורך הזמן, היבול של השנה שעברה או תנאי התעבורה והמבנה שלה) (איור 1).
במקרים מסוימים בהם הניידות חשובה, גאולוקטינג נתוני חיישנים קונטקסטואליים אלה הוא דרוש. למעשה, מעט מה-Internet of Things יכול להיחשב "סטאטי". ציוד במפעלים, שדות ובתי-חולים הוא יותר שימושי בהיותו נייד, וחיישן אופטי בחלק של ציוד שהוא סטאטי גיאוגרפית הוא עדיין נייד במקום, ודורש היגוי /כיוון.
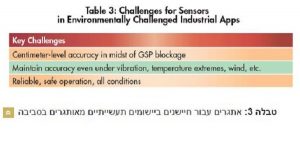
IoMT זה (טבלה 2) משלב נתונים קונטקסטואליים ומצבי, ובמהות מגביר את שימושיות הנתונים ושבחי היעילות. לדוגמה, כדי לנתח את ההזדמנויות של שיפורי התפוקה, דמיינו את ההבדל בשייכות של הידע על הטמפרטורה, לחות ומיקום מדויק של זרע מושתל אישית, לעומת ידע פשוט של תנאי הטמפרטורה והקרקע של שדה בעל זרעים שתולים מקרית.
חיישניים אינרציאליים בתוך מכונות חכמות
חיישנים אינרציאליים משמשים לשתי פונקציות עיקריות ברוב המכונות החכמות: ייצוב/כוונון הציוד או ניווט/הכוונה (איור 2). (שימוש נפדר וחשוב הוא עבור ניתוח רעידות וניטור התנאים, נושא המכוסה בנפרד).
בעוד ה-GPS יכול להיחשב לעזר הניווט הנבחר עבור רוב המערכות בשל ההימצאות בכל מקום שלו, למעשה עבור רוב המערכות התעשייתיות רבות, קיימות דאגות משמעותיות לגבי ההסתמכות על GPS, בעיקר בשל הסתימות (blockages) האפשריות. מעבר לחישה אינרציאלית במהלך סתימת GPS הוא יעיל, אך רק כאשר מניחים שהגורמים האינרטיים הם באיכות מספיק טובה כדי לספק דיוק מתאים במהלך הפסד האות הנקלט. במקרה של לולאת ייצוב/סרבו, אפשר לסמוך על חיישנים אינרציאליים במנגנון המשוב לשמירה על זווית כוונון אמינה של אנטנה, פלטפורמת עגורן, להב בנייה, קיום חיווי חקלאי או מצלמה על מל"ט.
בכל הדוגמאות הללו, המטרה היא מעבר להספקה של תכונה שימושית (לדוגמה בקרת מחווה בטלפון נייד), כדי לספק דיוק קריטי או מנגנוני אבטחה בתוך סביבות קשות ביותר (טבלה 3).
איכות החיישן מקפיעה
יש מיתוס, או אולי חלום, שאלגוריתמי שילוב-חיישנים יכולים לשמש ל"קידוד" מהותי של ביצועים טובים בתוך טכנולוגיית חיישנים גבולית למדי. אפשר להשתמש בשילוב חיישנים עבור תיקונים אחדים; לדוגמה, חיישן טמפרטורה לשם תיקון סטיית טמפרטורה של חיישן אחר, או חיישן מד-תאוצה (g) כדי לתקן השפעת כוח הכובד על גירוסקופ.
אולם, אפילו במקרים אלה, דבר זה מכייל רק את החיישן הנתון אל הסביבה. הוא לא משפר את היכולת המובנית לקיים את הביצועים בין נקודות הכיול, הוא רק משרבב ביניהם. חיישן בעל איכות גרועה יסטה במהירות בצורה אופיינית ללא נקודות כיול נרחבות/יקרות, הדיוק יורד במהירות.
למרות זאת, כמות מסוימת של כיול רצויה אופיינית אף בחיישנים איכותיים כדי לשלוף את הביצועים הגבוהים ביותר מההתקן. הגישה היעילה-לעלות ביותר לעשות זאת תלויה בפרטים המפורטים של החיישן, וידע מעמיק של דינאמיקת התנועה (איור 3, מבלי לציין גישה לציוד בדיקה יחסית מיוחד. בשל סיבה זו, צעד הכיול/קיזוז נראה באופן מוגבר כהכרח מובנה מיצרן החיישן.
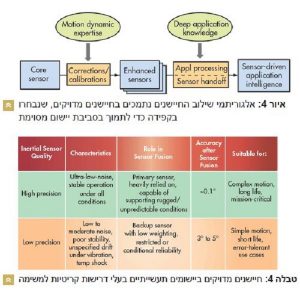
צעד משמעותי שני בנתיב הפיכת מוצאי החישה הבסיסיים לתוך מידע שימושי ברמת היישום הוא במסירה מוזנת על-ידי המצב של החיישן. דבר זה דורש ידע נרחב של דינאמיקת היישום, כמו גם היכולות של החיישנים, כדי לקבוע בצורה הטובה ביותר על איזה חיישן ניתן לסמוך בנקודת זמן נתונה כלשהי.
איור 4 מציג דוגמה קונספטואלית של תפקיד שילוב החיישן ביישום תעשייתי. כאן, עבור יישום תעשייתי מדויק, נעשתה בחירה מדוקדקת של חיישנים כדי לתמוך בצורך הצפוי של פעולה בסתימות GPS בעלות פוטנציאל גבוה, והפרעות מגנטיות וסביבות אחרות קשות בפוטנציה. מסיבה זו, התכונה משוחררת מתשתיות של חיישנים אינרציאליים היא בעלת משקל כבד, עם עזרי חישה אחרים הנבחרים כדי לתמוך באתגרי סביבה ספציפיים ולסייע לתיקון כל סטייה אינרציאלית ארוכת מועד.
בעוד עדיף לתכנן בחירת חיישנים כדי לאפשר עקיבה מדויקת בכל התנאים, דבר זה איננו אפשרי מעשית. לכן, קטע אי-הוודאות הקטן עדיין נותר בתכנון התרחיש. האלגוריתמים קיימים עבור כיולי חיישנים ערכיים, כמו גם לניהול מסירת החיישן לחיישן המתוחכמת המוזנת על-ידי מצב היישום.
לבסוף, יישום הסיום יכתיב את רמת הדיוק הדרושה, ואיכות החיישנים שנבחרו תקבע אם דבר זה אפשרי. טבלה 4 מיכלה שני תרחישים, המציגים את משמעות בחירת החיישן לא רק בתהליך התכנון, אלא גם בדיוק הציוד. חיישן בעל דיוק נמוך עשוי למעשה להיות מתאים אם יש לסמוך עליו בגבולות נתונים, ואם ליישום יש סיבולת עבור שגיאה – כלומר אם הוא לא קריטי לחיין או האבטחה, או אם דיוק לא-מדויק יחסית הוא מספיק טוב.
אם כי לרוב החיישנים בעלי רמת צריכה יש רעש נמוך ומבצעים בהתאם בתנאים נאותים, הם לא מתאימים עבור מכונות החשופות לתנועה דינמית. דבר זה כולל רעידה, אשר ביחידת מדידה אינרציאלית בעלת איכות נמוכה לא ניתנת להפרדה מתאוצה ליניארית פשוטה או מדידת הנטייה הרצויה.
כדי להשיג דיוק גדול ממעלה אחת, תוך פעולה בסביבה תעשייתית, הבחירה מתמקדת בחיישנים המתוכננים במיוחד כדי לדחות שגיאת סטייה מרעידה או השפעות טמפרטורה. חיישן מדויק זה יוכל לתמוך במגוון רחב יותר של מצבי יישום צפויים, ובמשך תקופות ארוכות יותר.
אינרציות בעלות איכות גבוהה
תכנון למען ביצועים לא חייב להיות ללא תכנון לשם יעילות בעלות, גודל והספק. אולם, תכנון מבנה של מערכת מיקרו-אלקטרו-מכנית (microelectromechanical system – MEMS) במטרה עיקרית של צמצום העלות יקריב אופיינית ביצועים, לעתים אף משמעותית. בחירות פשוטות של הפחתת העלות, כגון פחות מסת סיליקון וזיווד מובנה פלסטי מזיקים במידה גדולה לביצועי ה-MEMS.
הפקת מידע מדויק ויציב מהתקן MEMS כמו זה באיור 5 דורש יחס אות לרעש חזק המסופק על-ידי משטח ועובי הסיליקון, כמו גם מאמץ ממוזער המוכתב אל הסיליקון על-ידי בחירת זיווד המרכיבים דרך זיוודים ברמת המערכת. עם דרישות של ביצועי משתמש סופי תוך מחשבה על הגדרת החיישן, הסיליקון, השילוב וגישות הכיול/בדיקה ניתנים למיטוב כדי לשמור על ביצועים נאותים אף בסביבות מורכבות, ולמזער עלות.


טבלה 5 מראה ביצועים בהתקן תעשייתי ברמה בינונית, בהשוואה לחיישן צריכה אופייני שניתן למצוא בטלפון נייד. (רשום שהתקני תעשייה בעלי רמה גבוהה יותר זמינים גם, והם בסדר גודל טובים יותר מאשר אלה המוצגים). רוב התקני הצריכה ברמה נמוכה אינם כוללים מפרטים עבור פרמטרים דוגמת השפעת התאוצה הליניארית, יישור הרעידות, הליכה זוויתית אקראית ופרמטרים אחרים שיכולים להיות מקורות השגיאה הגדולים ביותר ביישומים תעשייתיים.
חיישן תעשייתי זה מיועד לשימוש בתרחיש המנבא תנועה יחסית מהירה או קיצונית (2000 מעלות בשנייה, 40 g), כאשר מוצא חיישן בעל רוחב פס רחב הוא גם קריטי כדי לאפשר הבחנה טובה ביותר של אות. סטייה מזערית של הקיזוז במשך הפעולה (יציבות בהפעלה) רצויה כדי להקטין את ההסתמכות על מערך גדול יותר של חיישנים משלימים כדי "לתקן" ביצועים, ובמקרים אחדים, מזעור הסטייה בהדלקה (הדירות) הוא קריטי ביישומים שאינם יכולים להרשות לעצמם את הזמן הדרוש בשביל תיקונים בסינון המערכת הסופית. מדי-תאוצה בעלי רעש נמוך משמשים בשיתוף עם גירוסקופים כדי לסייע להבחין ולתקן כל סטייה הקשורה ל-g.
חיישני הגירוסקופ תוכננו למעשה כדי לבטל במישרין כל השפעה של אירוע-g (רעידה, הלם, תאוצה, משקל) על סטיית ההתקן, ומספק יתרון משמעותי ב-g ליניארי. ודרך כיול, גם סטיית הטמפרטורה והכוונון תוקנו. ללא תיקון הכוונון, התקן MEMS רב-צירי אופייני, אפילו כאשר הוא משולב במבנה סיליקון יחיד, יכול להיות לא מכוון עד כדי תרומה גדולה לתקציב השגיאה.
בעוד הרעש הפך לגורם פחות בולט בין סוגי החיישנים בשנים האחרונות, פרמטרים דוגמת השפעת ה-g הליניארי ואי-כיוונן, שהם מאוד יקרים במימוש, הן דרך גישה של תכנון בסיליקון או כיול מיוחד-לחלק, הופכים למוסיפי רעש בכל יישום למעט קביעת תנועה פשוטה או יחסית סטאטית. Table 6 מספק דוגמה של שימוש במקרה המשווה יחידת מדיה אינרציאלית (inertial measurement unit – IMU) של MEMS תעשייתי אמיתי ל-IMU של צרכן, כאשר לשניהם יש ביצועי רעש יחסית חזקים. אולם, התקן הצריכה איננו מיועד או מתוקן לרעידות או כוונון.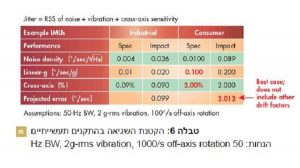
הדוגמה מראה את מפרט ההתקן, וההשפעה שלה על תקציב השגיאה מבוססת על ההנחות שנקבעו. השגיאה הכוללת היא ריבוע סכום השורש של שלושת השגיאות המוצגות. כפי שניתן לראות, g ליניארי וציר צולב (חוסר כוונון) שולטים על השגיאה במקרה של התקן צריכה, כאשר ההתקן התעשייתי מאוזן טוב יותר. לבסוף הפרש מזערי של 20X בביצוע מושג, מנלי להביט על מקורות של שגיאות פוטנציאליות נוספות של המוצר התעשייתי הפחות קשוח.
פשרות במערכת
רוב יישומי תנועה מורכבת דורשים IMU מלא (שלושה צירים של תאוצה ליניארית כמו גם תנועה קצב זוויתית) כדי לקבוע במדויק את המיצוב. פונקציונליות של IMU זמינה כיום גם בצורת רמת השבב (צריכה), ובשילוב ברמת המודול (תעשייתי). (איור 6). אם כי בהיגיון אמור להיראות ש-IMU ברמת השבב של הצרכן הוא יותר מתקדם בשילוב המערכת, ההיפך הוא בעצם נכון כאשר המטרה הסופית היא קביעת תנועה מדויקת בסביבה תעשייתית מורכבת.
במקרה של IMU תעשייתי, ביצועים גבוהים זמינים מתוך הקופסה. אותם הביצועים הגבוהים מושגים בצורה אמינה לאורך חיי היישום, עם דרישה מזערית, אם בכלל, לתיקון בתוך המערכת. ה-IMU לצרכן, אם כי הוא נראה משולב במלואו ושלם, דורש זמן, שילוב ועלות משמעותיים (איור 7) כדי לנסות להשיג רמות ביצוע דומות (אופיינית אף בלתי אפשריים) וכנראה שלא משיג פעלה אמינה דומה.

סיכום
חיישנים תעשייתיים חכמים הרגישים למיקום מביאים רווחי יעילות עצומים במסגרת אוטומציית המכונות. הדיוק והאמינות ברמת המערכת היא תחילה פונקציה של איכות חיישן הליבה, לא המערכות והתוכנה הקשורה אליה. על אף זאת, השילוב, התוכנה המוטבעת והקישוריות הכוללים של הגישה, כאשר היא בנויה מסביב לחיישני איכות, מאפשרים פתרונות חישה חכמים שיכולים לשפר בהרבה את איכות והשימוש של המידע, מבלי להקריב את האבטחה והאמינות החשובים גם כן.
