




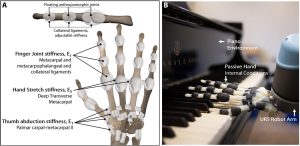
היד המודפסת בשילוב של חומרים רכים ונוקשים, שמדמה יד אנושית על כל מפרקיה, חוברה לקובוט (רובוט שיתופי) שתוכנת לנגן קטעי מוסיקה באמצעות הנעת המפרקים הנכונים
בשנים האחרונות ניתן לראות עניין גובר והולך באקדמיה העולמית וגם מחוצה לה, בלימוד הטבע, כדי לספק השראה ביולוגית לפיתוח רובוטים עם יכולות פיזיקליות וקוגניטיביות שתואמות למערכות ביולוגיות. לחוקרים היה ברור בכל המחקרים כי לבעלי החיים, כולל האדם, יש אינטראקציה מורכבת ביותר ובדרכים מגוונות ביותר עם הסביבה המשתנה ועמוסת המידע. עבודות ומחקרים שבוצעו בשילוב רובוטים בעלי השראה מהביולוגיה, הדגימו כיצד המורכבות של התנהגות בעלי החיים הינה תוצאה של מערכת היחסים בין הבקר (המוח), הגוף וההתייחסות שלהם לסביבה. התנהגות מורכבת, כך התברר מהר, אינה רק תוצאה של פעילות המוח לבדו, אלא ממורכבות של כל המערכת החיה, כולל, מה שהוגדר ״הגוף המכני״.
 בעולם הרובוטיקה, שממשיך להתפתח ובקצב מהיר, לתכונות המכניות יש יש תפקיד מהותי וחשוב בתפעול האינטליגנטי, לא רק של בעלי חיים, אלא גם של מכונות. תכנון מכני חכם מאפשר למערכות להדגים התנהגויות מורכבות המושגות במעט מאוד אנרגיה ובעלות נמוכה. בתחום המחקר הזה, פיתוח של ״מוח רובוטי״ ושל ידיים המקושרות אליו, כאלה היכולות לבצע פעילות ותנועות המקבילות לפעילות היד האנושית, תוך הסתגלות לשינויים בסביבה, הוא עדיין אתגר בלתי מפוצח.
בעולם הרובוטיקה, שממשיך להתפתח ובקצב מהיר, לתכונות המכניות יש יש תפקיד מהותי וחשוב בתפעול האינטליגנטי, לא רק של בעלי חיים, אלא גם של מכונות. תכנון מכני חכם מאפשר למערכות להדגים התנהגויות מורכבות המושגות במעט מאוד אנרגיה ובעלות נמוכה. בתחום המחקר הזה, פיתוח של ״מוח רובוטי״ ושל ידיים המקושרות אליו, כאלה היכולות לבצע פעילות ותנועות המקבילות לפעילות היד האנושית, תוך הסתגלות לשינויים בסביבה, הוא עדיין אתגר בלתי מפוצח.
אחד המחקרים, שזכה באחרונה לפרסום רב, הוא מחקר של מדענים באוניברסיטת קיימברידג׳, שפיתחו יד רובוטית שהודפסה בתלת מימד שיכולה לנגן בפסנתר קטעי מוסיקה פשוטים. ברוח חג המולד שנחגג לא מכבר, הנעימה הראשונה שנבחרה, היתה המנון הכריסמס: ג׳ינגל בלס. לדברי החוקרים, אין לצפות שהיד הרובוטית תדע לנגן בקרוב סימפוניות של בטהובן, אך היא בהחלט מדגימה ומחקה חלקים חשובים בהתנהגות הגוף האנושי.
לטובת המשימה גוייסו שתי חברות מובילות בתחומן: חברת Universal Robots, מחלוצות תחום הקובוטים (רובוטים שיתופיים) בעולם, שתרמו את הזרוע הרובוטית וחברת סטרטסיס שבאמצעות מדפסות התלת מימד שלה הודפסה היד עצמה. ״המשימה שלנו היתה פשוטה: לראות כמה תנועה נצליח לקבל תוך שימוש במכניקה פשוטה״, אומר ג׳וסי היו, מנהל המחקר במחלקה להנדסה באוניברסיטת קיימברידג׳. היד הרובוטית, שנבנתה והודפסה משילוב חומרים רכים וקשים, מחקה את היד האנושית על העצמות והמפרקים – ללא השרירים האנושיים והתנועה שהיא מסוגלת לה היא תנועה ׳פאסיבית׳. ״למרות שהאצבעות לא נעו כל אחת בנפרד, הופתענו לגלות איזה טווח פעולה עדיין אפשרי ולחקות סוגי נגינה שונים בפסנתר…״.
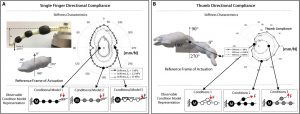
 לדברי היו, יד ה׳שלד׳ האנתרופומורפית, אמנם מגלה נוקשות מסויימת, אבל, יחד עם זאת הדגימה היטב כיצד למרות המגבלות ניתן היה להשיג טווח די רחב של התנהגות מורכבת. לדברי היו, כדי שהיד ה׳שלדית׳ תצליח לנגן כמה יצירות השונות זו מזו, בסגנון הדומה לנגינה האנושית, הצוות צריך היה לזהות את רמת ה׳נוקשות׳ שנדרשה מכל חלק ביד עבור כל קטע נגינה והמשימה הושגה בגלל סוגי החומרים המודפסים שהרכיבו את היד הסופית – חלקם נוקשים וחלקם רכים. ״למרות המחקר הרב שנערך בתחום של ׳מניפולציה רובוטית׳, בחצי המאה האחרונה, מרבית הרובוטים המאוד מתוחכמים של היום, לא מבוגלים לבצע פעולות שילדים קטנים יכולים לבצע בקלות רבה. ההערכה שלנו היא שמבנים מכניים מורכבים יכולים לשמש לגישור הפערים הללו. החידושים בתחומי ההדפסה בתלת מימד ובמורכבות החומרים בהם עושים שימוש מאפשרים לנו לבצע חקר שיטתי יותר של המורכבות של מבנים מכניים פאסיביים וזה גם מה שאיפשר לנו להדפיס יד דמויית יד אנושית שיכולה, לדוגמה, לנגן בפסנתר״.
לדברי היו, יד ה׳שלד׳ האנתרופומורפית, אמנם מגלה נוקשות מסויימת, אבל, יחד עם זאת הדגימה היטב כיצד למרות המגבלות ניתן היה להשיג טווח די רחב של התנהגות מורכבת. לדברי היו, כדי שהיד ה׳שלדית׳ תצליח לנגן כמה יצירות השונות זו מזו, בסגנון הדומה לנגינה האנושית, הצוות צריך היה לזהות את רמת ה׳נוקשות׳ שנדרשה מכל חלק ביד עבור כל קטע נגינה והמשימה הושגה בגלל סוגי החומרים המודפסים שהרכיבו את היד הסופית – חלקם נוקשים וחלקם רכים. ״למרות המחקר הרב שנערך בתחום של ׳מניפולציה רובוטית׳, בחצי המאה האחרונה, מרבית הרובוטים המאוד מתוחכמים של היום, לא מבוגלים לבצע פעולות שילדים קטנים יכולים לבצע בקלות רבה. ההערכה שלנו היא שמבנים מכניים מורכבים יכולים לשמש לגישור הפערים הללו. החידושים בתחומי ההדפסה בתלת מימד ובמורכבות החומרים בהם עושים שימוש מאפשרים לנו לבצע חקר שיטתי יותר של המורכבות של מבנים מכניים פאסיביים וזה גם מה שאיפשר לנו להדפיס יד דמויית יד אנושית שיכולה, לדוגמה, לנגן בפסנתר״.
״השגה של התנהגות פונקציונלית, דווקא דרך פאסיביות היא הכרחית לשרידה של מערכות ביולוגיות, אך כשמגיעים לפיתוח רובוטים, היא בהחלט יכולה להגביל את הפעילות. ההתנהגות תלויית סביבה בצורה משמעותית ורגישה לשינויים ואף מגבילה את הגיוון בהתנהגות. די ברור לנו כיום שכדי להעלות עוד רמה את רמת האינטליגנציה של גופים מכניים פאסיביים, יש צורך לפתח שיטה להגדלת טווח ההתנהגויות בסביבות שונות זו מזו. זהו האתגר הגדול ביותר כיום״.
תוצאו המחקר, שפורסמו במגזין הנחשב Science Robotics יסייע לחוקרים אחרים לתכנן בעתיד רובוטים עם יכולות לחיקוי טבעי יותר של התנועות האנושיות – ובמינימום הוצאת אנרגיה. ״ניתן לייצר לא מעט תנועה ברובוטים: הליכה, שחייה ותעופה״, האומר היו. ״תכנון מכני חכם יכול לאפשר מקסימום טווח תנועה בעלויות נמוכות. נגינה בפסנתר היא מבן אידיאלי בגלל המורכבות שלה״.
לסרטון:
ל










