




מבוא
בשנים האחרונות חלה התקדמות משמעותית ביישומי אוטומציה תעשייתית בתחומי מערכות הינע וזיהוי עצמים, שסוללת את הדרך לעידן חדש של אינטראקציה בין אדם למכונה. ביחס לסטנדרטי בטיחות רלוונטיים ( IEC 61508, IEC 62061 ו- ISO 13849-1 / -2, לדוגמה), חידושים בענף הרובוטיקה מקלים אף הם על שיתוף הפעולה ההדוק בין אדם ומכונה באותו מרחב עבודה. שילוב יכולות אנושיות עם אלה של רובוטים בסביבה תעשייתית יוצר פתרונות ייצור המספקים איכות טובה יותר, עלויות נמוכות יותר, ארגונומיה משופרת, ומחזורי עבודה מהירים יותר (כשמילת המפתח היא תקן תעשייה 4.0!). כתבה זו מסבירה מהם הקווים המנחים החלים על פיתוח יישומי בטיחות לרובוטים שיתופיים, בהתבסס על הסטנדרטים הבינלאומיים העוסקים בבטיחותם של רובוטים תעשייתיים (ISO 10218-1 / -2) ובמיוחד בטיחות רובוטים שיתופיים (ISO / TS 15066. הכתבה מדגישה גם את המגבלות של הטכנולוגיות כיום, ועוסקת בשיקולים ובתחזית לגבי הדרישות וההתפתחויות בעתיד.
אינטראקציה ובטיחות בין אדם-למכונה
כשעוסקים באינטראקציה בין אדם למכונה ובבטיחות בתעשייה, יש צורך גובר במכונות גמישות המסוגלות לפעול באופן עצמאי ושניתן להתאים אותן לתנאי הייצור המשתנים במהירות וביעילות. כדי להגן על העובדים מפני הסכנות הנשקפות על ידי המהירות, הכוח, ותנועת הרובוטים, בדרך כלל עובדים רובוטים מאחורי מכשולי הגנה. עם זאת, אם נדרשת אינטראקציה הדוקה בין האדם למכונה, לא ניתן להשתמש בשיטה סטנדרטית יעילה זו של הפרדה פיזית בין האדם למקור הסכנה. מסיבה זו, צריך ליישם שיטות חלופיות להפחתת הסיכון.
הגדרות – טרמינולוגיה
המפגש בין בני אדם עם רובוטים פעילים והתקנים הדומים לרובוטים יכול מתאפיין בשני פרמטרים של אינטראקציה: מרחב וזמן. אם אין מרחב או זמן משותפים שבהם נעים האדם והרובוט הפעיל, תנועות הרובוט אינן מהוות סיכון והמצב נחשב "לא אינטראקטיבי". מצבים שבהם בני אדם ורובוטים חולקים חלל משותף אך בזמנים שונים, נחשבים ל"שיתוף פעולה (Collaborative)". המונח "שיתופי" משמש לתיאור מצבים בהם בני אדם ורובוטים פועלים באותו מרחב בו-זמנית.
דו-קיום (Coexistence)
גם ביישומי רובוטים תעשייתיים בהם לא נדרשת התערבות אנושית במהלך תהליך הייצור, עדיין יהיה צורך עבור איש צוות להיכנס לסביבת העבודה של הרובוט, למשל, לצורך עבודות תחזוקה. ביישומים כאלה, סביבת העבודה חייבת להיות מגודרת עם דלתות גישה עם "שולב" (Interock – מהמילה שילוב – סידור בטיחותי המונע ביצוע פעולה מסוימת לפני ביצוע פעולה אחרת). השולב חייב להבטיח כי יישומים מסוכנים של הרובוט ייעצרו בכל פעם שמפעיל נכנס לאזור המסוכן, ויש לשמור את השולב כל עוד אדם נשאר בתוך האזור המסוכן או כאשר דלתות הגישה נפתחות.

דוגמא לדו-קיום (Coexistence)
שיתוף פעולה (Cooperation)
התהליכים הקשורים לפריקה וטעינה של תאים רובוטיים על ידי מפעיל מהווים יישום נפוץ מאוד של רובוטים תעשייתיים. בתרחישי יישומים שיתופיים כמו זה, המפעיל והרובוט משלימים את השלבים הדרושים בתהליך באותו מרחב עבודה בזמנים שונים. גם כאן, נדרשים אמצעי בטיחות טכניים. בהתאם להגדרת מערכת הטעינה והפריקה, ייתכן שיהיה ראוי להשתמש במכשירי הגנה אלקטרו-אופטיים כגון וילונות אור לבטיחות או סורקי לייזר בטיחותיים.
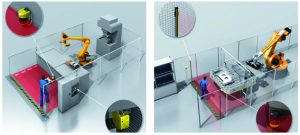
שיתוף פעולה (Cooperation)
שיתופיות (Collaborative/Collaboration)
ביישומים מסוימים, יש צורך בבני אדם וברובוטים פעילים לקיים אינטראקציה באותו מרחב עבודה בו-זמנית. בתרחישים שיתופיים אלה (Collaborative), יש להגביל את הכוח, המהירות והתנועה של הרובוט. אם הם זמינים, אמצעי בטיחות מובנים או אמצעי בטיחות נוספים כגון הגבלת מומנט דרך ביצועי ההינע או חלקים הקשורים לבטיחות בבקר של המערכת יכולים לשמש כדי למזער את הסיכון. כוח, מהירות, ונתיבי תנועה חייבים להיות מנוטרים ונשלטים בהתאם לדרגת הסיכון בפועל. דרגה זו של סיכון תלויה גם במרחק בין האדם לרובוט. יישום זה מסתייע בחיישנים אמינים שמסוגלים לזהות נוכחות אנושית או לקבוע את המהירות שבה בני אדם נעים לכיוון האזור המסוכן ואת המרחק שלהם ממנו. למעשה, חיישנים אלה צריכים להיות מסוגלים להתגבר על האתגרים העתידיים שהם תוצאה בלתי נמנעת של פיתוח של טכנולוגיות שיתופיות.
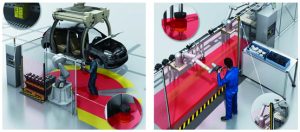
שיתופיות (Collaborative/Collaboration)
תקנים ודרישות ליישומי בטיחות של רובוט שיתופי
המערכת הרובוטית המתוארת בחלק 2 של תקן ISO 10218 מורכבת מרובוט תעשייתי ואמצעי הקצה שלו (ה"אפקטור"), וכן חלקי מכונות שרירותיים, ציוד, התקנים, צירי הינע חיצוניים וחיישנים לסיוע לרובוט להשלמת משימותיו. דרישות היסוד: ישנן מספר דרישות בסיסיות לתכנון יישומים שיתופיים. סביבת העבודה השיתופית חייבת לעמוד בדרישות הבאות: 1. יש להציב אותה כך שהמפעיל יוכל להשלים את המשימות שלו באופן בטוח וללא בעיות, מבלי שייווצרו סיכונים נוספים שמציבים ציוד משלים או מכונות אחרות בסביבת העבודה. 2. אסור שייווצר סיכון לפציעה כתוצאה מחיתוך, ריסוק או דקירה. כמו כן, אסור שיהיו סיכונים הנשקפים על ידי דברים כגון משטחים חמים או חלקים "חיים" אשר לא ניתן למתן על ידי הפחתת המהירות, כוח, או כוח של מערכת הרובוט. אותו הדבר מתייחס כמובן גם לגבי ציוד התומך בחלקים הנמצאים בשלבי עיבוד בתהליך הייצור. יש למקם את שטח הפעולה של הרובוט במרחק מינימלי מאזורים נגישים סמוכים, בהם קיים סיכון של ריסוק או חסימה. אם הדבר אינו אפשרי, יש להשתמש בהתקני מיגון נוספים. בכל מקום אפשרי, יש לפרוס מגבילי צירים על מנת לצמצם את מספר התנועות החופשיות של הרובוט בחלל ובכך להפחית את הסיכון לפגיעה אישית.
מצבי פעולה שיתופיים בהתאם לתקן ISO 10218-2 ו- ISO / TS 15066
מפרט טכני ISO / TS 15066 קובע ארבעה מצבי פעולה שיתופיים אשר ניתן להשתמש בהם בנפרד או בשילוב, בהתאם לדרישת היישום הנוגע בדבר ואת התכנון של מערכת הרובוט:
ניטור של עצירה בטוחה – הרובוט מופסק במהלך אינטראקציה עם המפעיל בחלל השיתופי. הסטטוס הזה מנוטר, וההינע יכול להיות עדיין מופעל על ידי חשמל. שליטה ידנית – בטיחות שיתוף הפעולה בין האדם לרובוט מתקיימת הודות להנחיה ידנית של הרובוט על ידי שליטה במהירות מופחתת.
כוח והגבלת כוח – הדרך לשיתופיות – מגע פיזי בין מערכת הרובוט (כולל חלקים הנמצאים בשלבי עיבוד בתהליך הייצור) לבין אדם (מפעיל) יכול להתרחש בכוונה או שלא במתכוון. הבטיחות הנדרשת מושגת על ידי הגבלת העצמה וההספק לערכים בהם לא ניתן לצפות לנזקים ולסיכון. שיתופיות על בסיס עצמה והספק מוגבלים מחייבת רובוטים שתוכננו במיוחד עבור מצב הפעלה זה. מפרט טכני ISO / TS 15066 כולל ערכים מקסימליים (גבולות עומס ביו-מכני) שלא ניתן לחרוג מהם אם הרובוט מתנגש בחלקי גוף של בני אדם.
ניטור המרחק והמהירות – העתיד: מהירותו ומסלול תנועתו של הרובוט מנוטרים ומכווננים על בסיס מהירות ומיקום של המפעיל באזור המוגן. ביישומים שיתופיים, אחת או יותר מהשיטות המפורטות כאן חייבת להיות מיושמת על מנת להבטיח את שלומם של כל האנשים החשופים לסכנות הפוטנציאליות. השיטה (או השיטות) שנבחרה תהיה תלויה ביישום הנמצא בהישג יד. הדרישות הקיימות להפעלת מרכות של רובוטים שיתופיים כוללות שימוש במערכת בקרה מתאימה לבטיחות התואמת ל- PL d לפי ISO 13849-1.
הערכת סיכונים (Risk Assessment)
בשוק ישנו כיום מגוון גדול של דגמי רובוטים תעשייתיים, החל ברובוטים תעשייתיים סטנדרטיים וכלה ברובוטים שתוכננו במיוחד עבור פעולה שיתופית (רובוטים שיתופיים – Collaborative Robots נקראים בקיצור Cobots). כאשר רובוטים משולבים במערכות, יש לבצע הערכת סיכונים (Risk Assessment) של כל מערכת הרובוט (מכונה מלאה). הפעולות הנובעות כתוצאה מהפחתת הסיכונים ישמרו על פעולת שיתופיות בטוחה. הערכת סיכונים זו חייבת להתבצע גם אם לרובוט המעורב יש מאפיינים שתוכננו על מנת להפחית את הסיכון.
הפחתת סיכונים (Risk Reduction)
אמצעי הבטיחות הבסיסיים עבור רובוטים שיתופיים כוללים: הגבלת הכוח או המומנט המרביים המותרים, למשל, באמצעות פעולת הקטנה של הנתונים (Dimensioning) בהינע. • הגדרת ממשקי הרובוט על מנת להקטין את השפעת הלחץ או את כוחות ההתנגשות המועברים (למשל, רובוט מעוגל משטחים, חומרים מרופדים סופחי אנרגיה. עם זאת, היעילות של אמצעי הבטיחות הבסיסיים הללו עלולה להיפגע באופן משמעותי על ידי תכנון כלי הרובוט, התמיכה, החלק המעובד על ידי הרובוט בתהליך הייצור, או מכונות אחרות בסביבת העבודה השיתופית. ניתן להשתמש באמצעי בטיחות נוספים כדי למנוע זאת, כגון • הגבלת כוח (מומנט), הספק או מהירות דרך מכלולי בטיחות של מערכת הבקרה • שימוש בהתקני הגנה רגישים ללחץ (PSPE) או בהתקני הגנה אלקטרוניים ( ESPE) כדי לעצור או להפעיל לכיוון ההפוך את תנועות הרובוט.
לסיכום
בעתיד, בני אדם ורובוטים יעבדו באופן הדוק יותר ביישומי אוטומציה שבהם נדרשת גמישות רבה (למשל ייצור בנפח קטן במגוון גדול של סוגי מוצרים). פעולות הרכבה ידניות מוחלפות על ידי שיתופיות בין אדם לרובוט, כך שיכולות האדם והמכונה משלימות זו את זו באופן אידיאלי. כתוצאה מכך, ניתן לשפר את הארגונומיה של סביבות העבודה שבהן נדרשות רמות גבוהות של פרודוקטיביות. הגבלות המהירות והכוח שנדרשות לבטיחות, חייבות להתאים לדרישות תפוקת הייצור. עקרונות התכנון ב-ISO / TS 15066 משלימים את הדרישות שכבר נוסחו ב-ISO 10218-1 / -2 ויוצרים בסיס לתכנון של יישומי רובוטים שיתופיים. המוצרים והתקנים הנמצאים כיום בשוק אינם מסוגלים לענות באופן מלא על כל הדרישות הצפויות של הבטיחות ואת השיתופיות החלקה של רובוט ואדם כיום. פיתוח טכנולוגיות חדשות של חיישנים ורובוטים, לצד בקרה חכמה הן דרישות בסיסיות ליישומים עתידיים של רובוטים שיתופיים. אין שני יישומים זהים הנמצאים כרגע לפתרון השיתופיות של אדם ורובוט. הערכת סיכונים ייעודית היא חיונית, גם אם הרובוטים המשמשים תוכננו במיוחד עבור אינטראקציה עם בני אדם. העובדה כי יצרני הרובוטים משלבים אמצעים לתכנון בטיחות למוצרים שלהם אינה משחררת את האינטגרטורים מחובתם כיצרני מכונות לנתח ולהפחית סיכונים פוטנציאליים. על יצרני מערכות ואינטגרטורים של מערכות רובוטיות לבצע בדיקות יסודיות של אמצעי הבטיחות המבניים שננקטו על ידי יצרני הרובוטים. כמו כן, עליהם להתחשב בכל הסכנות והסיכונים שעשויים להישאר ולתכנן את מערכת הרובוט בהתאם לתוצאות הערכת סיכונים זו. כתוצאה מהערכת סיכונים וכן אמצעים נוספים שמיושמים להקטנת הסיכון (למשל, וילונות אור בטיחות או סורקי לייזר בטיחותיים וכו') על ידי יצרן המערכת על מנת להשיג יישום שיתופי שבו כל ההיבטים הגיעו לדרגת סיכון מתקבלת על הדעת.
