









מאז השקתם של מערכות המכ"ם הראשונות, בתחילת שנות השלושים, התפתחה טכנולוגיית המכ"ם באופן משמעותי. בשנים אלו, הצליחו חוקרים להקטין את הגודל של מערכות מכ"ם, את צריכת ההספק שלהן ואת העלויות שלהן באופן ניכר, במקביל להגדלת הרזולוציה ולחיזוק יכולת חישובי האלגוריתמים של המכ"ם. ההתפתחויות והחדשנויות בטכנולוגיה של המעגלים המשולבים אפשרו ליצור קבוצה של מערכות מכ"ם להספק נמוך ולגלים מילימטריים לטווח קצר, שמשתמשת בתדרי ת"ר (RF) של הגל הנושא בטווח של 30 עד 300 ג'יגה הרץ (או באורך גל בטווח שבין 1 עד 10 מ"מ), ובכך הוסיפו למסה הקריטית של יישומים אלחוטיים שהתפשטו בתשתיות חברתיות. כיום, הם משולבים במספר מכוניות נבחרות, כעזרי חניה או לבטיחות – כדי להבחין בהולכי רגל ולאתר משתמשים ועצמים אחרים שנמצאים בכביש, במרחק מטרים ספורים. את מערכות המכ"ם האלו לתדר גבוה, שיש להם ממדים קטנים, אפשר לשלב באופן בלתי נראה בכל מכשיר כמעט, ולקבל טווח רחב של יישומים אינטואיטיביים וחכמים. בין היישומים שכבר אפשר לקבל נכללים אבטחת מבנים (למשל מנייה של אנשים וגילוי פורצים), ניטור רפואי מרחוק של נהגים, ניטור סימנים חיוניים של מטופלים וזיהוי מחוות עבור אינטראקציה אינטואיטיבית של אדם מכונה. את ההתפשטות הבלתי נמנעת של יישומים אפשר להרחיב עוד, עם מערכות מכ"ם שיכולות להגיע אפילו לרזולוציה מדויקת יותר של טווחים ושל טביעות עקבה קטנות יותר, עם יתרונות רבים יותר של נצילות בהספק ועלויות.
המאמר הזה מציג מכ"ם הפועל ב- 140 ג'יגה הרץ לביצועים גבוהים במעגלים משולבים, שפותח הזדמנויות לאבחון של תנועות זעירות המתאימות לתחומים שונים. התכונות העיקריות של מערכת מכ"ם FMCW מתוארות בצד אפיון מקמ"ש ומדידות של סימנים חיוניים ומחוות בעזרת מכלול
MIMO 2×2.
מערכות מכ"ם לשימושים שונים
על אף שמערכות מכ"ם פועלות על פי אותו עיקרון בסיסי, קיימים מימושים שונים שמשפיעים על העלויות, הגודל, צריכת ההספק והיכולות שלהן. מערכות מכ"ם יכולות להיות שונות בתדר של הגל הנושא (למשל, 2.4 ג'יגה הרץ, 8 ג'יגה הרץ, 60 ג'יגה הרץ, 79 ג'יגה הרץ ו- 140 ג'יגה הרץ), ברוחב הפס שלהם ובסוג האפנון של הגל הנושא (אפנון תדר או אפנון מופע). מצבי תמסורת יכולים גם להיות שונות, לפעול במצב דפקים או במצב רציף, בתלות ביישום. בדרך כלל, מערכות מכ"ם קטנות בגודלן עם רזולוציה גבוהה יגררו פעולה בתדרים גבוהים של גל נושא וברוחב פס גדול. מערכות מכ"ם לתדר גבוה (כגון מערכות עם תדרים מעל 1000 ג'יגה הרץ) מציעות פעולה רחבת פס. פעולה כזו מובילה לרזולוצית טווח מדויקת שמשתנה ביחס הפוך לרוחב הפס. הסחות דופלר מופיעות כשינוי בתדירות של גל שמוחזר ממטרה, כאשר המקור והמטרה מתקרבים או מתרחקים. גם את ההסחות האלו אפשר למדוד בצורה מדויקת יותר בתדרים גבוהים יותר, ובכך לספק מדידות מדויקות של מהירות וכיוון של המטרה.
במהלך הזמן, צפוי שהנתונים המגיעים מחיישנים מרובים, יוכלו לכלול גם סריקת מכ"ם (לידאר – lidar), חיישני תמונה רחבי ספקרום, מצלמות אינפרה אדום או חיישנים אולטרה סוניים, שימוזגו בפלטפורמה משותפת. לכל אחד מהחיישנים האלו יהיו יתרונות ומגבלות משל עצמו. למשל, טכנולוגיה של מערכות מכ"ם שתאפשר קיום פתרונות עמידים והיא תוכל לשמש כחלופה לחישני תמונה אופטיים, כאשר יתקיימו תקנות לגבי פרטיות שאוסרות שימוש במצלמות. צפוי גם שהזיהוי של תבניות פיסיות יניע טכניקות של לימוד מכונה לסיווג עצמים או מחוות, בהתבסס על חתימות דופלר.
מקמ"ש למכ"ם FMCW הפועל ב- 140 ג'יגה הרץ משולב באופן מלא, בטכנולוגיית CMOS של 28 ננו מטר
Imec פיתחה מקמ"ש למכ"ם FMCW הפועל ב- 140 ג'יגה הרץ עם אנטנות על השבב, שמוכוונות לאבחון סימנים חיוניים ולזיהוי מחוות. המכ"ם פועל במרחק של 0.15 עד 10 מטרים, עם רזולוצית טווח של 11 מ"מ ורוחב פס בת"ר של 13 ג'יגה הרץ עם תדר מרכזי של 145 ג'יגה הרץ. השבב של המקמ"ש משולב בטכנולוגית CMOS ברמת ייצור המוני ב- 28 ננו מטר. בדרך זו, אפשר להבטיח שיתקבל פתרון שעלותו נמוכה. אנטנות שמשולבות על אותו שבב מצומדות יחד, ויוצרות בכך קישור שידור – קליטה (TX-RX). המכ"ם מתאפיין בביטול של הקישור הזה על השבב, כדי לעקוף במקלט את ההשפעה הזו, שיכולה להוביל לדחיסה של השבח ולהיסטים של מתח ישר.
בלוקי הבנייה העיקריים באב הטיפוס של המכ"ם כוללים מקמ"ש משולב שמתאפיין באנטנות על השבב ובחוג נעילת מופע (PLL) דיגיטלי בדגימת חסר שיוצרת את ה"ציוץ" (chirp) של מכ"ם FMCW. כפי שיוסבר בהמשך, חלק המקמ"ש של מכ"ם FMCW הוא שיוצר את ההבדל בין התדירות של אות הציוץ בת"ר המוחזר לבין הציוץ בת"ר המשודר. אמנם רוחב הפס בת"ר קובע את רזולוצית הטווח, אך אפשר גם להביא את אותו הבדל בתדירות בטווח מגה הרץ, וליצור בכך עוד הגברה, עוד סינון ועוד המרה של אנלוגי לספרתי, בקלות רבה יותר מאשר עם צורות גל מכ"ם אחרות (למשל, גל רציף מאופנן מופע).
שבבי מקמ"ש מרובים משולבים בפתרון הסופי על מנת לאפשר מכ"ם שלם מסוג כניסות מרובות, יציאות מרובות (2×2 MIMO). מכמי"ם מסוג MIMO מרחיבים את יכולות הגילוי מבחינת הטווח והמהירות של מכ"ם מסוג SISO כניסה יחידה, יציאה יחידה עם רזולוציה זוויתית לאורך האזימות, ובכך מספקים מידע נוסף כדי לפתור את המנח במרחב של המטרה.
מאפנן FMCW עם ציוץ מהיר ועם רוחב פס של 1.5 ג'יגה הרץ
כצעד ראשון בהפעלת המכ"ם, חוג PLL יוצר גל נמשך מאופנן תדר, כאשר התדר הנושא מאופנן על פני רוחב פס רחב בעזרת צורת גל שן משור לינארית. קצב החזרה של אפנון שן המשור ידוע כקצב ה"ציוץ".
Imec פיתחה ואפיינה חוג PLL בציוץ מהיר ל- 16 ג'יגה הרץ, שמיוצר בטכנולוגית CMOS בייצור המוני של 28 ננו מטר. חוג PLL זה יכול לפעול הן במצב קלאסי והן במצב דגימת חסר ללא מחלק, ובכך מציע גמישות וביצועים גבוהים. חוג ה- PLL שמגיע לרוחב פס ציוץ רחב של 1.5 ג'יגה הרץ בזמן ציוץ של 30 מיקרו שניות, מאפשר אפנון תדר שן משור מהיר.
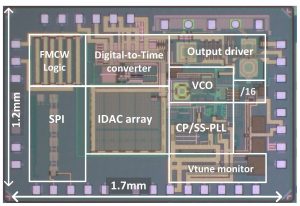
איור 1: צילום וביצועים של חוג PLL למכ"ם FMCW של 16 ג'יגה הרץ
שבב מקמ"ש עם תקציב מצוין של קישור מכ"ם
על מנת להפעיל את המכ"ם, יש אות שבב מרכזי של 16 ג'יגה הרץ מבוזר בין כניסות שידור (TX) מרובות (בקונפיגורציה MIMO). האות עובר המרה מעלה ל- 144 ג'יגה הרץ דרך קסקדה של שני משלשי תדר, ולאחר מכן הוא מוגבר ומשודר דרך אנטנות על השבב. הציוץ המשודר מוחזר על ידי מטרות שמוצבות בצד הרחב של האנטנה, ונקלט על ידי המקלט על השבב. במקלט, האות הזה מוגבר ועובר השוואה להעתק של אות הציוץ הראשוני, באמצעות הערבל. ההשהיה של האות הנקלט (שתואם לזמן התנועה של המעבר מהמשדר למטרה ובחזרה) גורמת להיסט תדר מיידי ביחס לציוץ הייחוס. ככל שהמרחק למטרה גדול יותר, ההסטה היחסית הזו תהיה גדולה יותר בתדר. הטווח של המטרה יושג על כן מהתדר של האות שעבר המרה מטה.
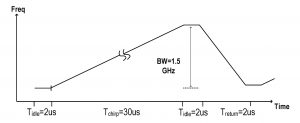
המשדר מאופיין בהספק האיזוטרופי היעיל המוקרן (EIRP) שלו. עבור אב טיפוס משולב של 140 ג'יגה הרץ, ערך ה- EIRP הנמדד יגיע עד 11 dBm עם רוחב פס 3dB של 127 עד 154 ג'יגה הרץ. כיום, זהו ערך ה- EIRP הגבוה ביותר שתועד עבור התקן יחיד בהשוואה למה שפורסם בספרות כמצב הטוב ביותר בפס הרוחב D. הביצועים של המקלט מאופיינים בספרת הרעש שלהם ובשבח ההמרה. התקבלו ערכים מצוינים בין 8dB לבין 84dB, בהתאמה.
איור 2: (משמאל) מאפייני ההעברה של המשדר
(מימין) שבח המקלט וספרת הרעש (מוצגים ב- ISSCC 2019).
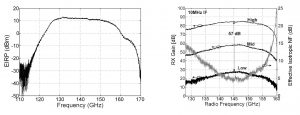
| ייחוס | עבודה זו | מקמ"ש וופרטל, THz 2016 [3] | TI, JSSC 2014 [4] | TI, JSSCC 2018 [5] | IHP, IMS 2016 [6] | I.Nasr, Google, IFX, JSSC 2016 |
| טכנולוגיה | CMOS 28 ננו מטר |
SiGe 0.13 מיקרו מטר |
CMOS 65 ננו מטר |
CMOS 45 ננו מטר |
SiGe 0.13 מיקרו מטר |
SiGe 0.35 מיקרו מטר |
| סוג המכ"ם | FMCW | FMCW | בדפקים | FMCW | FMCW | FMCW |
| אנטנה | על השבב | על השבב | במארז | במארז | על השבב | במארז |
| תדר ת"ר [ג'יגה הרץ] |
145 | 240 | 160 | 79 | 122 | 60 |
| רוחב פס ת"ר [ג'יגה הרץ] | 13 | 60 | 7 | 4 | 5.8 | 7 |
| רזולוצית טווח [ס"מ] | 1.1 | 0.3 | 2.1 | 3.8 | 2.6 | 2.1 |
| ערוצים | 1TX-1RX | 1TX-1RX | 4TX-4RX | 3TX-4RX | 1TX-1RX | 2TX-4RX |
| נתיב יחיד הספק משודר/EIRP [dBm] |
11.5 (EIRP) |
5 | 4 | 10.8 | 5 | 4 |
| שבח מקלט [dB] | 80 | 10 | 42.5 | לא ישים | לא ישים | 19 |
| ספרת הרעש [dB] | 8 | 21 | 22.5 | 18 | לא ישים | 9.5 |
| רוחב פס תדר ביניים [מגה הרץ] | 17 | 18 | 100 | 15 | לא ישים | 1 |
| גודל שבב [מ"מ2] | 6.5 | 3.2 | 20 | 22 | 10.35 | 20.2 |
| פיזור הספק מדווח לכל הערוצים [מילי ואט] | 500 | 1800 | 2200+0 | 3500++ | לא ישים | 990* |
| * כולל חוג PLL וממיר אנלוגי לספרתי על השבב
++ כולל חוג PLL ממיר אנלוגי לספרתי ו- DSP על השבב 0 פיזור הספק בפעולה בדפקים + חזית ת"ר בלבד עם מתנד VCO על השבב |
||||||
איור 3: טבלת השוואה של העבודה עם מכמי"ם משולבים מהשורה הראשונה
(מוצג ב- ISSCC 2019)
כצעד הבא בהפעלת המכ"ם, האות האנלוגי מומר לאות דיגיטלי, על מנת לאפשר עיבוד של האות ומיצוי מידע לגבי הטווח והמהירות.
צריכת ההספק הכוללת של שבב מקמ"ש המכ"ם היא מתחת ל- 500 מילי ואט.
אנטנות קטנות על השבב
למכשירי מכ"ם עם תדרים מתחת ל- 100 ג'יגה הרץ יש צורך באנטנות גדולות מחוץ לשבב, מיוצרות למשל על התקנים בלמינציה, לתדר גבוה ומחוברות לשבב דרך שבב לחיבור ישיר (flip-chip) או בטכניקות של איחוי חוטים (wire bonding). תהליכי הפיתוח והמימוש של מודולים מורכבים אלו של אנטנות במארזים, תורמים באופן משמעותי לעלות ולגודל של מערכת המכ"ם הסופית. ואולם, ככל שהתדר של הגל הנושא יהיה גבוה יותר (או ככל שאורך הגל שלו יהיה קטן יותר), כך אפשר יהיה לכווץ את יחידת האנטנה. בסופו של דבר, עבור תדרים אות נושא מעל ל- 100 ג'יגה הרץ, אפשר לשלב את האנטנה על שבב המכ"ם עצמו. פתרון זה של אנטנה על שבב מציע יתרון שבא לידי ביטוי באזור נקי ובעלות, בהשוואה לאנטנות על שבב על מעגלים מודפסים (PCB), אשר עליהם מורכב השבב. יתר על כן, אין צורך ליצור מעברים בין השבב למעגל המודפס שנושאים אותות ב- 140 ג'יגה הרץ, שיכולים לפגוע ברוחב הפס ובעוצמת האות. בעבודה זו, יחידות האנטנות שולבו בשכבת פסיבצית האלומיניום של שבב המקמ"ש. האנטנות של המקלט והמכ"ם רחוקות 2 מ"מ זו מזו כדי להקטין למינימום את ערב הדיבור (crosstalk).
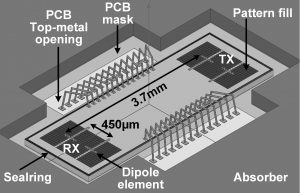
איור 4: מראה תלת ממדי של תושבת השבב והמארז (מוצג ב- ISSCC 2019)
מכ"ם MIMO עם רזולוציה זוויתית מדויקת
עבור כמה יישומים, בהם גם זיהוי מחוות, יש צורך ברזולוציה זוויתית גבוהה על מנת ללכוד את המחווה בשלושה ממדים. אחת הגישות לאפשור רזולוציה זוויתית היא עיקרון המכ"ם MIMO. מערכות מכ"ם MIMO משדרות אותות מאונכים באופן הדדי מאנטנות שידור מרובות ואפשר לחלץ את צורות הגל האלו מכל אחת מבין האנטנות הקולטות.
Imec הדגימה מערך וירטואלי 1×4 עם 3 שבבי מקמ"ש (לרבות שני משדרים ושני מקלטים), שיוצרים מכלול MIMO של 2×2. הקונפיגורציה נקראת 1×4 וירטואלי בשל הרזולוציה הזוויתית שתואמת לרזולוציה שהתקבלה על ידי 4 אלמנטים בשורה. בקונפיגורציה הזו, אות הציוץ המרכזי מחולק לשבבי המקמ"ש השונים על המעגל המודפס. בעזרת שימוש באלגוריתם MUSIC ברזולוצית על, התקבלה רזולוציה זוויתית מדויקת של 7.5 מעלות במכ"ם MIMO שלם בגודל של סנטימטרים מרובעים ספורים בלבד.
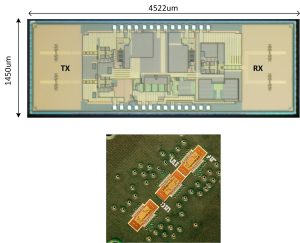
איור 5: מראה בתקריב ואיור מיקרו של שבב של לוח מכלול MIMO שמראה את שלושת השבבים של המקמ"ש (מוצג ב- ISSCC 2019).
עם הפיתוח של המכ"ם MIMO – FMCW – צוות האנשים ב- Imec ראה בדמיונו שני יישומים עיקריים: גילוי סימנים חיוניים וזיהוי מחוות.
גילוי סימנים חיוניים: הוכחה של התפיסה
הוגדרו ניסויים כדי לחקור את אפשרות המימוש של תהליך גילוי, בזמן אמת, של סימנים חיוניים – בהם נכללים ניטור קצב לב (למשל לניטור קצב הלב של מטופלים או לבדיקה של קצב פעימות הלב של הנהג היושב במכוניתו) וניטור נשימה.
כהוכחה ראשונה של התפיסה, לוח המכ"ם 1×4 MIMO הוכח כמי שיכול ללכוד את הקצב של "לב לדוגמה", באמולציה על ידי דיאפגרמת רמקול שמציגה העתקה של 1 מ"מ. בעזרת המכ"ם אפשר ללכוד בהצלחה קצבים של 1 הרץ ו- 5 הרץ. בסדרה השנייה של הניסויים, הוצגה יכולת המימוש של מדידה, בזמן אמת, של קצב הנשימה וקצב הלב של אדם (נלכדה מתוך תנועה זעירה של העור). בעתיד, יתווספו עוד יכולות עיבוד כדי לאפשר הפרדה מדויקת יותר בין קצב הלב לקצב הנשימה.
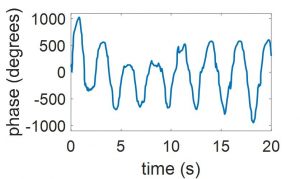
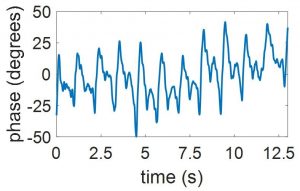
איור 6: סימנים חיוניים שנמדדו: (למעלה) קצב נשימה של אדם.
(למטה) קצב פעימות לב של אדם.
אנשי הצוות ב- Imec בונים כעת דגם נייד של מכ"ם MIMO בגודל 1×4, על מנת להציג את יכולתה של המערכת ללכוד סימנים חיוניים בזמן אמת.
לקראת מערך MIMO גדול לזיהוי מחוות
כיישום שני, סומנו כמטרה גילוי טביעות אצבע וזיהוי מחוות, בתמיכה לממשקי אדם – מכונה. על מנת להיות מסוגלים ללכוד מחוות ותנועה, חשוב שלמכ"ם תהיה רזולוציה זוויתית גבוהה. אפשר לקבל אותה על ידי שימוש במערכות MIMO במערכים רחבים יותר. לכן, אנשי הצוות מפתחים כעת מכ"ם MIMO (וירטואלי) 4×4 – שממומש על ידי שורה אחת ועמודה אחת של 4 שבבי מקמ"ש, בכל אחד. את מערכת המכ"ם ישלימו יכולות עיבוד נוספות (כדי לעבד למשל מידע לגבי מיקרו דופלר) ועם טכניקות לימוד מכונה. טכניקת לימוד מכונה תשמש כדי לאמן את המערכת בהתבסס על נתונים מסווגים וכדי ליצור הכרה בסופו של דבר של חתימת דופלר של עצמים בתנועה.
סיכום והצעות
Imec הציגה מקמ"ש מכ"ם קומפקטי במיוחד, FMCW, בשילוב מלא של 140 ג'יגה הרץ, אשר פועל בטכנולוגית CMOS של 28 ננו מטר. עם תדר מרכזי של 145 ג'יגה הרץ (בהמרה מעלה מאות ציוץ של חוג PLL של 16 ג'יגה הרץ), רוחב פס ת"ר של 13 ג'יגה הרץ מניב רזולוציה בטווח של 11 מ"מ. השבב כולל נתיבי אותות של משדר ומקלט עם אנטנות משולבות. עבור המשדר, נמדד ערך שיא EIRP גבוה של 11dBm (אלמנט יחיד), בזמן שהמקלט מגיע לספרת רעש ולשבח המרה של 8dB ו- 84dB, בהתאמה. בקונפיגורציה MIMO של 2×2 (או 1×4 וירטואלי), מקבלים רזולוציה זוויתית מדויקת. תכונות אלו הופכות את פתרון המכ"ם לכלי רגיש לגילוי סימנים חיוניים ומחוות. Imec בונה כיום התקן הדגמה נייד כמקרה לדוגמה של היכולות של מערכות המכ"ם MIMO של 140 ג'יגה הרץ שלה.
Imec מפתחת פתרונות חישה אחרים של מכ"ם, קומפקטיים ובעלות נמוכה עבור יישומי IoT, בהם נכללים מכשירי מכ"ם מבוססי CMOS של 8 ג'יגה הרץ, 60 ג'יגה הרץ ו- 79 ג'יגה הרץ. כל השבבים מגיעים לביצועים ראשונים במעלה, תוך הימנעות מטכנולוגיה מיוחדת. אפשר לקבל פלטפורמות הערכה עבור חברות.
