








במהלך שני העשורים האחרונים חל שינוי גדול באופן ההתקשרות בין מערכות תעשייתיות. מהלך הוביל חברות להתרחק ממערכות מבוססות ערוץ שדה לכיוון מערכות תקשורת שמבוססות על אתרנט. הצמיחה החזקה של תקשורת תעשייתית מבוססת אתרנט צפויה להימשך בקצב מואץ, המחקר האחרון של האנליסט MarketsandMarkets מצא כי השוק הכולל של אתרנט תעשייתי צפוי לעלות מ-9.2 מיליארד דולר בשנת 2020 ל-13.7 מיליארד דולר בשנת 2026, שיעור גידול שנתי מורכב (CAGR) של 7.3% לאורך כל תקופת המחקר.
לא מפתיע שאתרנט תעשייתי השיג את נתח השוק הזה בתקופה קצרה יחסית. למרות השיפורים שבוצעו במערכות מבוססות ערוץ שדה, עדיין יש להן כמה מגבלות. הם אידיאליים לפונקציונליות בקרה פשוטות, אך מכיוון שיצרנים נוספים פועלים לקראת הטמעת אסטרטגייתIndustry 4.0, קשה להתגבר על המגבלות הללו. המגבלה הצפויה ביותר היא המהירות, במיוחד כשמדובר ביישומים שזקוקים לבקרה מורכבת ומדויקת מאוד, כגון רובוטיקה.
יישום מבוסס אתרנט מהווה חלופה ברורה מאליה. באתרנט יש מספיק רוחב פס כדי להתמודד עם הרוב המכריע של מקרי שימוש תעשייתיים, אפילו עם יישומיIndustry 4.0 התובעניים ביותר. זהו תקן מובן היטב וחסכוני שמשמש בכל רחבי העולם. הוא גמיש וניתן להשתמש בו ביישומים רבים ושונים, במיוחד משום שניתן לשלב בקלות ובזול ענפים של ערוצי שדות ישנים בלב האתרנט. לא חסרים מהנדסים שעבדו עם טכנולוגיית אתרנט ומבינים אותה עבור ההטמעה והתחזוקה. Industry 4.0 דורש קשר הדוק בין הפעילות התעשייתית לבין ה-IT, לכן הגיוני שיהיו מערכות תקשורת שמבוססות על אותו תקן. עם זאת, האתרנט שנמצא במערכות IT אינו דטרמיניסטי, וזוהי אחת הדרישות החשובות ביותר של מערכות בקרה.
דרישה חסרה זו גרמה למספר יצרנים וארגונים להתחיל לפתח תקן מבוסס אתרנט שיתאים לשימוש תעשייתי. מבין הסטנדרטים החדשים הללו, הפופולאריים ביותר הם Ethernet TSN, EtherNet/IP, PROFINET ו-EtherCAT. מאז התפתחותם הראשונית, כל אחד מהפרוטוקולים הללו ומערכות קטנות יותר או קנייניות אחרות מצאו נישה גיאוגרפית או טכנית משלהם.

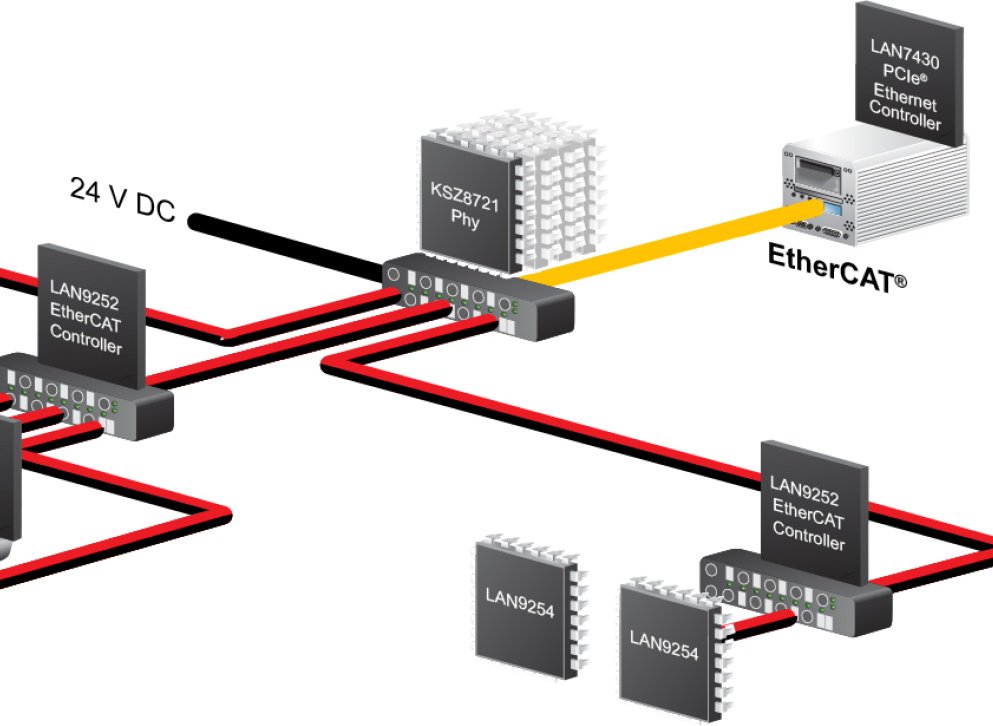
איור 1 – מערכת EtherCAT טיפוסית שמציגה את התפקידים שמוצרי Microchip יכולים לבצע
לכל הפרוטוקולים יש יתרונות וחסרונות משלהם. באופן כללי, הם לוקחים את הקונספט של האתרנט, כמו זה שנמצא ב-IT ומתאימים אותו כדי לספק פעולה בזמן אמת. יישום אתרנט תעשייתי אחד עושה את הדברים קצת אחרתEtherCAT (אתרנט לטכנולוגיית אוטומציה של בקרה) שומר על השכבה הפיזית הסטנדרטית של האתרנט ובונה פרוטוקול דטרמיניסטי חדש לחלוטין מעליו. הפרוטוקול משתמש בבקר מארח, שהוא המכשיר היחיד שמורשה ליצור את מסגרת ה-EtherCAT. המסגרת תמיד באותו אורך, ולכל צומת התקנים ברשת יש אזור שאליו ניתן לגשת במסגרת. כשהמסגרת נעה ברחבי הרשת, כל צומת אוסף נתוני שליטה ומוריד את פרטי התשובה במרחב שמוקצה לו תוך שהוא עובר, מבלי לעכב את המסגרת יותר מהעיכוב בהתקדמות החומרה ומפיק קצב נתונים מרבי יעיל קרוב למהירות של 100 מגה-ביט לשנייה.
ביישומי אתרנט תעשייתיים אחרים, ביצוע בדיקת המסגרות, ביצוע בדיקת CRC ומעבר על המחסנית יכולים לקחת מאות מיקרו שניות. EtherCAT נועד להשיג את התהליך המלא ב-125 מיקרו שניות בלבד. מהירות זו הופכת את המערכת לרספונסיבית הרבה יותר, דבר שהופך את יישום הבקרה כולו ליעיל ובטוח הרבה יותר. בנוסף, צומת מכשירי EtherCAT הוא הרבה יותר פשוט מאשר יישומי אתרנט תעשייתיים אחרים, ודורש רק קוד מחסנית (SSC) שפועל על מיקרו-בקר צנוע, דבר שמפחית בנוסף את מורכבות המערכת ועלותה.
עם זאת, יישום EtherCAT אינו קל להשגה. המחסום הקשה ביותר עבור מעצבים הוא עמידה בדרישות זמן המחזור. יצרנים רבים, במיוחד אלה שמשתמשים במנועים, מעוניינים להטמיע אלגוריתמים של בקרה במהירות של 8000 מחזורים בשנייה, עם זמן מחזור של 125 מיקרו-שניות. למרות שמערכות EtherCAT אמורות להשיג את הנתון הזה בקלות, השגתו בפועל התבררה כקשה ולרוב היא דורשת כתיבה ואופטימיזציה של תוכנות רבות. בנוסף, זה עשוי להיות יקר – בקר מדף EtherCA DIN-rail שיוצב ליד בקר מנוע יכול לעלות מאות דולרים. עם זאת, ניתן להשיג עיצוב מותאם אישית בכמעט פי עשרה פחות.
פתרון חדש
Microchip הייתה מעורבת בשוק ה-EtherCAT מ-2012. החברה הציגה לראשונה את בקר מכשירי ה-EtherCAT הראשון שלה (ESC), ה-LAN9252, בשנת 2015. הכניסה לשוק הייתה מוצלחת, אפשרה לחברה לאסוף משוב על נקודות התורפה שנמצאות בשוק. היא גילתה שמשתמשים מעוניינים בדרך קלה יותר לעמידה בדרישות זמן המחזור ומגוון תכונות שיאפשרו להם להוסיף ערך ליישומים שלהם ויעניקו להם תובנות טובות יותר לגבי הפעולה של EtherCAT.
המשוב הוביל את Microchip לפתח את הדור השני של פתרונות ESC, שהושקו בספטמבר 2020. התקני LAN9253 ו-LAN9254 הינם 3 יציאות ESC שכוללות כניסות אתרנט כפולות בשילוב עם משדר 100BASE-TX בדופלקס מלא ופעולה ב-100 מגה-ביט לשנייה.
השיפור החשוב ביותר שהחברה ביצעה במערכות ה-ESC החדשות היה התאמת העיצוב כדי לאפשר למעצבים לעמוד ביעדי זמן המחזור עם מעט מאוד אופטימיזציה של תוכנה. המכשירים החדשים פישטו בנוסף את הטמעת צמתי EtherCAT באמצעות קיצוץ זמן העיצוב וה-BoM הנדרשים. יישומי EtherCAT רגילים משתמשים ב-ESC, מיקרו-בקר ו-EEPROM, עם תצורת אירוח EEPROM ל-ESC. Microchip פיתחה טכניקה שמחקה ביעילות את ה-EEPROM. ה-ESC משתמש בקריאת פונקציות כדי לקבל הוראות ישירות מהמיקרו-בקר המארח מבלי להשפיע על הביצועים, דבר שהופך את ה-EEPROM הפיזי למיותר.

איור 2 – לוח הערכת LAN9255 (EVB -LAN9255) מאפשר למהנדסים לפתח באמצעות מיקרו בקר משולב Cortex M4F עם בקר של מכשיר EtherCAT
בנוסף, מחשבי ה-IC החדשים תוכננו עם תכונה שמצמצמת את כמות הגבישים הנדרשת לתזמון. עיצובים תעשייתיים רבים משתמשים בבקרים מרובי צירים עבור יישומים, למשל ברובוטיקה. עיצובים אלה יכולים לדרוש עד שישה מעגלי בקר שונים להפעלת זרוע רובוטית מרובת צירים. כל אחד מהמעגלים הללו דרש בעבר גביש משלו עבור התזמון. מחשבי ה-IC החדשים כוללים שיטה לשכפול מדויק של מערכת מדידת הזמן והחלשת הרעש עבור ששת המעגלים באמצעות גביש יחיד, ביטול הצורך גבישים קריסטלים נוספים, והוזלת עלות המערכת נוספת.

IAN SATURLEY – Microchip Technology
שני המכשירים מספקים בנוסף תכונות אחרות שמקלות על ההטמעה והתפעול של מערכות EtherCAT. פרוטוקול EtherCAT תוכנן ללא אבחון בשכבה הפיזית, כך שמשתמשים ידעו בעבר רק על תקלות, כגון שחיקת הכבל, כשהתחילו לקבל שגיאות CRC וחוו בעיות אחרות. Microchip עיצבה יכולת לפקח על מצב הכבלים בכל עת, שמאפשרת למשתמשים לצפות תקלות לפני שהן הופכות לבעיות – עיקרון מרכזי ב-Industry 4.0.
ה-LAN9253 ממוקם בחבילת QFN, ומשכפל את מפרט החיבורים של חבילת LAN9252 עד כמה שניתן כדי לאפשר ללקוחות לנצל את השיפורים שהעיצוב מציע בעיצוב מינימלי מחדש. ל-LAN9254 יש 16 פיני קלט/פלט נוספים שמאפשרים ל-ESC לפעול כבקר פשוט ללא צורך במיקרו-בקר. כיוון שאזור המסגרת שבו משתמש צומת המכשיר ועיכוב ההפצה ידועים, ניתן למפות סיביות ב-ESC לקיזוזים ובמסגרת בקווי 32 הקלט/פלט כדי לאפשר חיבור של ציוד שדה ישירות לרשת EtherCAT.
לקוחות רבים ביקשו שנכלול בקר כדי לספק פתרון ESC כולל. השנה Microchip השיקה את LAN9255 שמוסיף מיקרו-בקר Cortex-M4F. ל-MCU יש מספיק מהירות כדי לטפל בדרישות EtherCAT, תוך שהוא משמש כמעבד יישומים עבור מערכת הבקרה. יחידת הנקודה הצפה של המעבד מסייעת לאלגוריתמים מורכבים יותר, למשל אלה הנדרשים לבקרת מנוע. נוספו גם שקעי אתרנט עם תמיכת קוד בגרסת SNMP 3 כדי לאפשר למעצבים גמישות רבה יותר כשהם מקשרים הטכנולוגיה התפעולית למערכות IT.
סיכום
LAN9253 ו-LAN9254 של Microchip הפכו את ההטמעה והתחזוקה של צמתי EtherCAT לפשוטות, מהירות וזולות יותר, באמצעות ביטול הצורך בכמה רכיבים תומכים, פישוט תהליך האופטימיזציה של התוכנה והוספת היכולת לנתח את הרשת. ה-IC החדש LAN9255 לוקח את המגמה הזו צעד אחד קדימה באמצעות ביטול הצורך בבקר מארח חיצוני ומספק למפתחים פתרון צומת EtherCAT ובקרת שדה בחבילה אחת. השימוש ב-Microchip MPLAB X Harmony Framework מאיץ את משך הפיתוח אפילו יותר בכך שהוא מאפשר לכתוב ולייעל את התוכנה גם עבור התקשורת וגם עבור הבקרה בסביבת משתמש אחת וקלה לשימוש.
כל המכשירים שנדונו במאמר זה זמינים כעת למשלוח בהיקפי ייצור ונתמכים על ידי שירותי אימות העיצוב של Microchip.
