




הקדמה
בשנים האחרונות נעשה שימוש הולך וגובר ב Computer Aided Design Tools על ידי מהנדסי פיתוח ואינטגרציה המעוניינים לפתח מערכות בקרת זמן אמת (Real Time) מתקדמות. פיתוח אלגוריתמי בקרה למערכות אילו מצריכה השקעה מרובה במשאבי מערכת כגון – שילוב של מהנדסים מתחומי התמחות שונים , עלויות פיתוח גבוהות, זמני פיתוח יחסית ארוכים, השקעה בSafety ובדיקות היתכנות של המערכת. לוחות הזמנים הדורשניים והצפופים של פיתוח מערכות בקרה בעיקר עבור תעשיות הרכב , הרובוטיקה החלל וההגנה (Defense) וכדומה אינם מאפשרים להמתין עד למוכנות או זמינות האב-טיפוס. למעשה, ברוב לוחות הזמנים של תכנון תהליך הפיתוח ישנה הנחה של מיקבול תהליכים ושל פיתוח האלגוריתמיקה והבקרה במקביל לתכנון ופיתוח חומרת אב טיפוס המערכת. מיקבול התהליכים וקיצור משמעותי של זמן פיתוח המערכת ישפיע באופן ישיר על עלויות הפיתוח הכוללות של המערכת. שיבוץ של כלים או מודולי תכנה מתקדמים יפשטו את יכולות פיתוח המערכת לאין ערוך ויאפשרו לממש מערכת בקרה מתקדמת עם מס' מצומצם של מומחי מערכת מתחומים שונים. השימוש בכלים יעילים ומתקדמים יאפשר למהנדס הבקרה לתכנן מערכת יעילה יותר עם התמקדות במימוש אלגוריתמי הבקרה ללא צורך לרדת לlow level של מימוש פונקציות שונות המקשרות בין האלגוריתם הבקרתי למגבר ההינע. היכולת לבדיקת היתכנות המערכת מעבר למעטפת העבודה הסטנדרטית ובתנאי קיצון שונים תאפשר לפתח מערכת יותר בטיחותית ויציבה לאורך זמן.
חברת אלמו הינע מבוקר המתמחה כבר יותר מ25 שנה בפיתוח מערכות בקרת Real-Time למערכות סרוו מתקדמות מציעה פתרון חדשני ומתקדם עבור מערכות בקרת ההינע לתחום התעשייתי , הרובוטיקה והdefense – Elmo’s Software-in-the-Loop (SIL) – Composer 2nd Generation
הComposer2® – כלי פיתוח מתקדם למהנדסי בקרה
כלי הComposer2® מהווה קפיצה אדירה באסטרטגית אלמו להעצמת יכולות הפיתוח של מהנדס הבקרה לשם פיתוח תנועת ובקרה המכונה. הComposer2® מאפשר פיתוח אלגוריתמי בקרה ייעודיים מתקדמים בצורה מהירה ויעילה ביותר על פי דרישות בקרת המכונה. הComposer2® משמש ככלי פיתוח ייעודי המאפשר פיתוח והרצת אלגוריתמי בקרת זמן אמת על מגבר הPlatinum servo drive ועל הבקר הרב צירי האלמואי של המכונה הPlatinum Maestro ברמת הFirmware, כשכל בקרת הינע המכונה פועלת בצורה מסונכרנת והרמונית. הComposer2® משמש כאחד הכלים החזקים ביותר שאלמו השיקה בשנים האחרונות ומהווה נדבך נוסף כחלק ממגוון כלי הפיתוח הרחב המוצע למשתמש , הכלי מאפשר יצירת אבי טיפוס, בדיקה ואימות אלגוריתמי הבקרה בזמן אמת ברמת בקר ההינע. הComposer2® משלב את סביבת MathWorks Simulink® Real Time Workshop עם סט עשיר של תכונות ויכולות זמן אמת חזקות של מגברי הPlatinum servo המתקדמים של Elmo ובקר המערכת הרב צירי – הPlatinum Maestro להשגת ביצועי בקרת תנועה מהירים, מיטביים וחסרי תחרות. באמצעות הComposer2® משתמשים יכולים להאיץ באופן דרמטי את תהליך פיתוח האלגוריתם של המערכת שלהם, ולעשות זאת באופן מיידי בבקר הסרוו בפועל ללא צורך בחומרה מיוחדת . הקוד שנוצר פועל ישירות על בקר הפלטינום הסטנדרטי או על ליבות הMaestro בזמן אמת. ה Composer2® מייצר אוטומטית קוד המופעל בתוך מערכת זמן האמת של הבקר, ומאפשר גישה למערך העשיר של ממשקי הפלטינום המאפשר פיתוחים של אלגוריתמי בקרה כמעט בלתי מוגבלים. המהנדס יכול לממש ולבדוק את אופן פעולת האלגוריתם באמצעות בלוקים המותאמים לביצועים ברמה גבוהה ולאמת נכונות תפקודית של המימוש באמצעות סימולציות ברמת המערכת. אלמו מספקת מגוון רחב של בלוקי ספריה יעודיים (Add-on Library) עבור סביבת MATLAB® & Simulink® ההופכת את המפרט האלגוריתמי שלך ליישום בעל איכות-ייצור גבוהה ע"י שימוש באופטימיזציות אוטומטיות של המערכת . עם מגוון רחב מאוד של יותר מ-150 בלוקים הזמינים למפתח לכל צורך של מימוש יישום סטנדרטי או מיוחד.
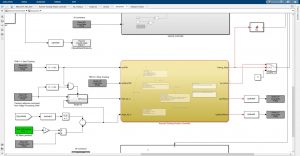
איור 1 :מודל Composer2® :דוגמא לחלק ממימוש הבקרה עבור מערכת ייצוב אינרציאלית עבור גימבל דו צירי קרדיט: ELMO

מודל Composer2®: דוגמא לחלק ממימוש הבקרה עבור מערכת היגוי אלקטרונית ל AGV (Automatic Guided Vehicle)
פיתוח קינמטיקה לרובוטים תעשייתיים
אחד השימושים מני רבים של הcomposer2® הוא האפשרות לפתח ולממש כמעט כל קינמטיקה של כל רובוט הקיים כיום בשוק. בין אם מדובר ברובוטים בעלי מס' מצומצם של דרגות חופש (Degrees Of Freedom – DOF) שאותם ניתן לממש ע"י מגברי הPlatinum Quartet של אלמו או רובוטים בעלי מס' רב של דרגות חופש כגון collaborative robots בעלי 6DOF או 7DOF שניתנים למימוש ע"י הבקר הרב צירי של אלמו – הplatinum Maestro. לplatinum Maestro מעבד בעל 4 ליבות אשר חיוניות לפיתוח קינמטיקת RT של אפליקציות רובוטיות ומאפשרות חישובים בזמן אמת של קינמטיקות בזכות זמן מחזור של 250 מיקרו-שנייה. משוואות הקינמטיקה המיושמות ב RT Code Section מחשבות את יעדי המיקומים/ המהירויות או את מומנטי היעד של כל צירי המערכת ומשדרים אותם בכל מחזור של ה EtherCat.
פיתוח פרוטוקולי תקשורת ייעודיים
מעבר למימוש אלגוריתמיקי בקרה מתקדמים, קינמטיקה של רובוטים או יצירת מודולי מערכת הרצים על הReal Time core של מגבר הPlatinum קיימת יכולת נוספת המאפשרת מימוש פרוטוקולי תקשורת סריאלים דטרמניסטיים (Real Time Deterministic) בצורה מהירה ויעילה לשם התממשקות ישירה מול מחשב מארח (Host) או מול רכיבי צד 3 כגון IMU’s או Gyros המשמשים בעיקר לייצוב מערכות אינרציאליות. התקשורת המבוססת על ערוצי RS422 , RS485 או UDP יכולה להגיע לקצבים של עד 3.5Mbps , ולתדרי תקשורת דטרמיניסטיים של עד 8Khz.
רק לאחרונה אלמו השלימה בהצלחה פיתוח פרוטורול תקשורת סריאלי מתקדם עפ"י דרישות ספציפיות של אחד מלקוחותיה. כחלק מהדרישות שהוגדרו בצורה מפורטת ע"י הלקוח נבנו הודעות בעלות מבנה ייחודי שמאפשרים תקשורת מול בקר טיסה של מערכת מבצעית. היתרון המהותי במימוש היה לקחת פרוטוקול תקשורת קיים של בקר טיסה ולהתממשק מולו עם הבקר האלמואי ללא צורך בשום שינוי או אדפטציה של הקוד מצד בקר הטיסה. הפרוטוקול כלל מבנה הודעות שונות, הכוללול header , message meta data באורך משתנה המותאם לסוג הפקודה וכמובן Tail הכולל Safety CRC מסדר גבוהה המחושב עבור כל הודעה שנשלחת ומתקבלת מבקר הטיסה. אחת היכולות במימוש הComposer2 בסביבת הMathlab/Simulink הינה לממשק אל תוך המודול קוד C , בד"כ קוד הנדרש לביצוע חישובים מתמטיים מתקדמים בצורה יעילה ומהירה. לדוגמא מימוש הCRC מסדר גבוהה , או חישובים מהירים הנדרשים לבדיקות הsafety של כל מידע תקשורת המועבר בין הHost למגבר או מהמגבר לHost עבור כל הודעה המתקבלת או נשלחת. ההודעות כללו שליחה וקבלת פקודות וחיוויים שונים כגון שליחת מיקומי מנועים באופן ציקלי (בקצב של 5Khz) לבקרים במערכת , חיוויים שונים על מצב המערכת, מיקמוי המנועים, מהירויות , זרמים , מתחי המערכת בכל זמן נתון או אינדיקציה על מצב המגברים במקרה של תקלה כלשהיא שהופיעה בזמן פעולת המערכת.אופציות נוספות לשמירת ערכי אתחול מערכתיים מסביבת המודל בזמן פעולה על הflash memory של המגבר לשם שינוי ושמירת הערכים תוך כדי עבודת המערכת. ניהול גרסאות מגבר, FW, וכדומה.
פרוייקט נוסף שהושלם לאחרונה בהצלחה ככל התממשקות לרכיב(Inertial Measurement Unit) IMU בעל 6DOF המשדר מידע הכולל מהירויות זויתיות ותאוצות פלוס מידע נוסף (כגון מונים , טמפרטורה וכו) עבור מערכת ייצוב אינרציאלית שהאלגוריתם שלה מומש ברמת המגבר. הIMU משדר את המידע בצורה דטרמיניסטית בbaud rate של 3.5MBps ובמחזורים של 5Khz לאחת המכניסות הסריאליות של המגבר האלמואי. בחלק של הפרוייקט הכלל התממשקות לIMU , נעשה פיענוח (parsing) של הבתים שונים של ההודעה לשם קבלת המידע המגיע מהIMU , בעיקר המהירויות הזויתיות וה,תאוצות של כל אחד מצירי המערכת (Along Yaw, pitch and roll).המידע הזה שימש לאחר מכן להפקת הזוית הסיבובית של הPitch והRoll לאחר פילטרציה להנחתת הרעשים שנעשתה ע"י שימוש בComplementary וKalman filter
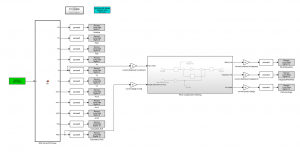
מודל Composer2®: במודל ניתן לראות את החלק האחראי על פענוח מידע המגיע מהIMU (המחובר ישירות לערוץ הrs422 של המגבר) ולאחר מכן שימוש בפילטר Complementary לשם הפקת זוית סיבובית עבור צירי ה pitch וה Roll
סיכום
בין אם מדובר על מימוש אלגוריתמיקה לבקרה, קינימטיקה לרובוטים , בקרת AGV או פרוטוקולי תקשורת ייעודיים כלי הComposer2 האלמואי יאפשר מימוש אידיאלי , מהיר, יעיל ללא התפשרות על ביצועי המערכת, כל זאת על מגברי ובקרי התנועה של אלמו.




