















רובוטים ניידים Outdoor, כמו יתר הרובוטים הניידים האוטומטיים המסורתיים (AMRs), מציעים מספר יתרונות עבור משתמשים, מה שהופך אותם לבעלי ערך עבור מערך יישומים רחב.
ראשית, הם יכולים לנווט ולפעול בסביבות אתגרים דינמיות, כגון שטח לא אחיד, יערות, ונופים עירוניים, דבר חיוני עבור משימות חיפוש והצלה, חקלאות, ובדיקת תשתיות.
בנוסף, רובוטים Outdoor יכולים לכסות שטחים גדולים ביעילות, דבר החוסך זמן ומשאבים.
רובוטים אלה יכולים לפעול גם בתנאי מזג אוויר קשים, ולהרחיב את שימושיות שלהם למשימות כמו ניטור נתונים סביבתיים, אבטחה ותגובה לאסון.
יתר על כן, רובוטים ניידים Outdoor יכולים להיות מצוידים במגוון חיישנים, כולל GPS, LiDAR ומצלמות, כדי לאסוף נתונים ולבצע משימות כמו מיפוי וחקירה. וכמובן, הם יכולים לפעול 24/7/365, עם תחזוקה מינימלית ברוב המקרים.
במקרים מסוימים, ניתן אפילו לחשוב על רכבים אוטונומיים ביישום מסורתי כמו רובוטים Outdoor, אבל עם אנשים הנוסעים בתוכם והנעים במהירויות גבוהות יותר אבל המושגים די דומים.
יתר על כן, האוטונומיה והיכולת שלהם להפעלה מרחוק מפחיתה את חשיפת האדם/הנוסעים למצבים מסוכנים.
עם התקדמות הטכנולוגית בלמידת מכונה ובינה מלאכותית (Machine learning and AI), הרובוטים האלה יכולים לבצע החלטות, להסתגל לתנאים משתנים ולשפר את הביצועים שלהם לאורך זְמַן.
בנוסף, הם יכולים להתריע למפעילים שלהם כאשר יש צורך בתחזוקה, ובכך להגביל זמן ההשבתה.
בסופו של דבר, לרובוטים ניידים Outdoor יש פוטנציאל לשיפור את הבטיחות, היעילות והפרודוקטיביות בתחומים שונים, מה שהופך אותם ל-טכנולוגיה בעלת ערך משמעותי להיום ובעתיד.

תמונה :1 דוגמה לאי-יישור נתונים. במקרה זה, זה מראה את ההבדל בין השגת נתונים מ-D3 LIDAR( תמונה שמאל) לעומת D2 LIDAR) תמונה ימנית(. אם הנתונים אינם מסונכרנים לחלוטין, יש יותר “מרחב התנועות” ויש פוטנציאל להתרחשות תאונה. קרדיט: VECOW
הבטחת נתונים מדויקים Ensuring Accurate and Aligned Data
חשוב לציין שהנתונים והפעולות כתוצאה מהבאת הנתונים מתוך הרובוט טוב רק כמו הנתונים הנכנסים, ויש הרבה מה לעשות לא רק החיישנים עצמם, אלא איך (ומתי) הנתונים מתקבלים מהחיישנים.
תופעה אחת שעלולה להציק לרובוטים ניידים Outdoor הוא חוסר יישור נתונים, המתייחס למצב שבו המידע או הנתונים שנאספו על ידי חיישני הרובוט, כגון מצלמות, LiDAR או GPS, לא מתאימות במדויק למיקום הפיזי של הרובוט או לסביבה בפועל בו הוא מנווט.
חוסר התאמה זה יכול להתרחש מסיבות שונות, כולל כיול חיישן נכון, שינויים בסביבה, בלאי מכני פגיעה ברכיבים, ובאגי התוכנה הבלתי נמנעים.
בשורה התחתונה, במידה ואין לך סנכרון זמן מדויק המציין מתי הרובוט מתחיל, לכל מה שאתה עושה מאותה נקודה והלאה יש פוטנציאל להיות לא מדויק.
כאשר מדובר בכיול, חוסר יישור פשוט יכול לגרום לנתונים לא מדויקים ללא ידיעת המשתמש.
ידוע כעובדה, שסביבות חיצוניות יכולות להיות די דינמיות – כגון קור וגשום יום אחד וחם ושמשי למחרת.
אנחנו לא יכולים להרשות לאף אחד מהשינויים האלה להשפיע על הנתונים הנכנסים וכמובן התוצאות היוצאות.
עם הזמן (עבודה), יש לבצע כיול לרכיבי הרובוט, כמו גלגלים או מפרקים, או כל פריט מכאני.
וההיסטוריה הוכיחה שאין דבר כזה מושלם קוד (ללא באגים).
אותם באגים או שגיאות בשליטה ובבקרה של תוכנת הרובוט עלולה להוביל לאי התאמה של הנתונים, מה שיגרום בוודאות לרובוט לבצע החלטות או ניווט לא מדויקים.
התמונה למעלה מציגה דוגמה לאי-יישור נתונים. במקרה זה, זה מראה את ההבדל בין השגת נתונים מ-LIDAR 3D (תמונה שמאל) לעומת LIDAR 2D (תמונה ימנית). אם הנתונים אינם מסונכרנים לחלוטין, יש יותר “מרחב התנועות” ויש פוטנציאל להתרחשות תאונה.
סנכרון דרך פיתול זמן Synchronization Through Time Winding
פיתול זמן הוא מרכיב מרכזי בסנכרון נתונים. המושג מתייחס ליישור ה-GNSS (מערכת הלוויין הגלובלית) עם השעון הפנימי של הרובוט. GNSS מתייחס לקבוצת לוויינים המשדרת נתוני תזמון למקלטים בתוך הרובוטים.
פיתול זמן כרוך גם הפעלת PPS רציפה (פולס לשנייה) של כל הצמתים (Nodes), כלומר האות המועברת כל שנייה. התוצאה צריכה להיות ערובה לכך שכל החיישנים פועלים מאותה בסיס מדידה. ללא תנאי הבסיס האלו, יהיה בלתי אפשרי לשמור את האותות מסונכרנים.
ואז מגיעה חותמת הזמן, עוד רכיב סנכרון חשוב בו נתונים והמידע נכתבים פיזית לחיישן.
מדידה זו מייצגת את הזמן המדויק ברמת דיוק של ננו-שניות. גם אם הרובוט (או הרכב) מאבד קשר עם הלוויין באופן זמני, ההחתמה עדיין מסוגלת לספק את הזמן והמידע לכל החיישנים.
לדוגמה: זה יכול להיות במקרה כאשר המכונית חונה בחניון תת קרקעי.
הטבעת הזמן עובדת יד ביד (hand-in-hand) עם פונקציית שמירת הזמן, דבר המאפשר
לרובוט לשמור את הזמן אצלו מקומית, עד שהרובוט יוכל לייצר חיבור מחדש עם הלוויין.
טביעת הזמן דוחפת את פרוטוקול הזמן לכל הצמתים (Nodes) ומבטיחה שכל החיישנים נמצאים
מסונכרנים, ותומכים במארח (Host) בשורה של תדרים.
הנתונים לקביעת פונקציית הזמן נוצרת באמצעות FPGA הפועל במהירות גבוהה מאוד, דבר המאפשר את הדיוק בננו-שניות.
תכונת שמירת הזמן מנהלת במדויק את נתוני הזמן המקומי תוך שימוש בטכניקות נגד שיבוש.
שרשור Daisy Chaining
שרשור Daisy Chaining, פונקציה שספציפית (בעיקר) ל-Vecow,
ספקית של מחשבים משובצים ליישומי רובוט ניידים Outdoor.
בעיקר פונקציית תוכנה לסנכרון זמן אוטומטי, שרשור דייזי הכרוך בהרחבת ערוצי הסנכרון עבור צמתי חיישנים ובקרים.
בדרך כלל יש מאסטר (Master) אחד ששומר על הזמן, ואז מועבר לעבדים (Slaves) השונים בתוך המערכת. ניתן לבצע שרשרת דייזי עבור סנכרון חיישן-צומת-לחיישן-צומת או סנכרון בקר-בקר.
שיטה נוספת בה נעשה שימוש הוא בזמן אמת מיקום קינמטי (RTK-real-time kinematic),
המוגדרת כטכניקת ניווט לוויינית ברמת דיוק גבוהה, שיכולה לקבוע את המיקום המדויק של המקלט.
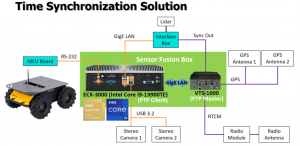
תמונה :2טופולוגיה טיפוסית של פתרון סנכרון זמן. פתרון זה מנצל מערכות -3000ECX ו-1000-VTS של Vecow. קרדיט: VECIW
באמצעות שיטה סטטיסטי מתוחכמת זו, השילוב של האותות הללו יכולה בהרבה מהמקרים לספק דיוק עד כדי ס”מ בודדים.
פלטפורמת מחשוב משובצת אחת שניתן להטמיע בשטח Outdoor ברובוט נייד וטיפול בתהליך סנכרון הזמן של Vecow הוא Sync Box VTS-1000. המערכת משלבת GNSS ומדידת אינרציה ברמת דיוק גבוהה (-IMUרכיבי יחידת מדידה), המספקים פונקציית מרובת סינכרוניים, ובכך מאפשרת לחיישנים חיצוניים לטפל בכל בסנכרון של חיישן במערכת.
במקרה של ה-VTS-1000, שלושת הטכנולוגיות העיקריות שהן מכסות: פיתול הזמן, הטבעת הזמן ושמירת הזמן.
ה-VTS-1000 מספק גם את נושאי מערכת ההפעלה הרובוטים (ROS) שהם נחוצים למשתמשי הרובוט ולהירשם למידע על הזמן, לנתוני ה-IMU הגולמיים, או נתוני מצלמה נוספים.
בשטח, ה-VTS-1000 משתלב יפה עם פלטפורמת הביצועים הגבוהים ECX-3000 של החברה, המופעלת על ידי דור 13 של Intel Core i9-13900TE (לשעבר Raptor Lake).
ה-Core i9-13900TE הפועל במהירות 5 GHz ועד 24 ליבות, מתאים היטב עבור
יישומי AI וכאלה הדורשים סנכרון זמן.
ה-ECX-3000 משלב את התוכנה והאלגוריתמים הדרושים לנייד outdoor ביישומי רובוט.
אם נדרשת פונקציית AI, ניתן להגדיר את ה-ECX-3000 עם מאיץ AI Hailo-8.
תכונות אחרות: כוללות שמונה LAN עצמאיים 2.5G, מתוכם עם ארבע יציאות IEEE 802.3at PoE+, ארבעה מגשי M.2 SSD בגישה קדמית (דיסק שליף), ושש יציאות USB 3.2 Gen 2. מתח הכניסה יכול לנוע בין 9 ל-50 Vdc.
הפתרון המשולב מספק פלט זמן רב-ערוצי (ToD- multi-channel time-of-day) עבור חיישנים מרובים Outdoor, יציאת PTP/gPTP Gigabit Ethernet ו-Gigabit אחת יציאת Ethernet עבור פלט ROS 2/DDS פאב/משנה. זה כולל גם GNSS כפול אנטנה לכיוון רובוט ומשלבת Xsens MTi-670 בדיוק גבוה
IMU בעל תשעה צירים.
תכונות התוכנה של הפלטפורמה כוללות פונקציית שרשרת דייזי (Daisy Chain) המאפשרת הרחבת ערוצי הסנכרון בצמתי חיישנים ובקרים.
אנטנת GNSS כפולה משולבת ואלגוריתם IMU yaw fusion מספקת פלט אמין דרך יציאת ה-Ethernet.
לתצורה קלה של פרוטוקולי הסנכרון ותדר המבוססים על דרישות חיישנים, Vecow מציעה כלי Python ידידותי למשתמש.
Vecow פיתחה מומחיות עמוקה בשילוב של רובוטים ניידים Outdoor ופתרונות סנכרון זמן, כמו גם שורה של פתרונות אחרים
ליישומים ולמידע נוספים צור איתנו קשר בכתובת yair@aironix.co.il.
על Vecow
Vecow הינה צוות של מומחים גלובליים לפתרונות משובצי מחשב. אנחנו מסורים ל-עיצוב, פיתוח, ייצור ומכירה של מחשבים ברמה תעשייתית.
מוצרים: כל המוצרים שלנו מובילים בביצועים, מהימנים, בעלי טכנולוגיה מתקדמת ומושגים חדשניים.
Vecow מציעה מערכות מחשוב AI המוכנות לבינה מלאכותית, מערכות משובצות ללא מאווררים, מערכות מחשוב לרכב, מחשוב חזק/קשיח (להתמודדות עם הלמים ורעידות), לוחות אם, מחשבי מסך מולטי-טאץ’, וצגי מולטי-טאץ’, ציוד היקפי משובץ ועיצוב & תכנון, שירותי ייצור עם ביצועים הטובים ביותר באמינות גבוהה, טכנולוגיה מתקדמת, ותפיסה חדשנית.
Vecow שואפת להיות השותף העסקי המהימן שלך בפתרונות משובצי מחשב. הניסיון שלנו ביחד עם צוות השירות מחויב ליצור ולתחזק שותפויות חזקות לאורך זמן רב, ומתן של פתרונות משולבים נקודתיים. השירותים שלנו ספציפיים ומתחשבים בצרכים הייחודיים של כל שותף בכל הקשור ל: רכב אוטונומי,
רובוטיקה חכמה, רכבת דיגיטלית, ביטחון ציבורי, תחבורה ו-V2X, Smart Factory, Deep Learning וכל יישומי Edge AI.
בקר בכתובת www.vecow.com
למידע נוסף www.aironix.co.il
צור איתנו קשר בכתובת yair@aironix.co.il
קרדיט תמונת כותרת: VECOW




