

אין ספק שהרובוטים בעתיד יחליפו במשימות רבות את בני האדם. חברת טסלה מפתחת בשנים האחרונות רובוט דמוי אדם בעל יכולת בינה מלאכותית מתקדמת. לטענת מייסד טסלה איילון מאסק, בעתיד נראה בעולם יותר מ 10 מילארד רובוטים אנושיים שיחליפו את בני האדם בהרבה מאד משימות יומיומיות.
אילון מאסק הילד הרע של עולם העסקים בארצות הברית ממשיך להביט מבחינה טכנולוגית רחוק, אפילו רחוק מאד. האדם שהביא את בשורת הרכב החשמלי לעולם התחבורהף ומי שנחשב לחלוץ ענף תעשיית החלל הפרטי ממשיך לנסות ולעצב את עתיד האנושות. מאסק מהמר ובגדול על עולם הרובוטיקה, ובמיוחד על תחום הרובוטיקה האנושית , רובוטים בדמות בני אדם – humanoid robot, שיתפקדו כמונו במגוון רחב של פעולות אנושיות שגרתיות.

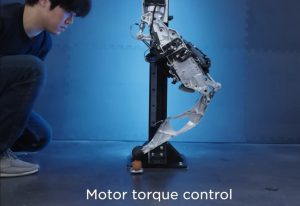
ניסויי מוטוריקה עדינה של ה OPTIMUS
באסיפת בעלי המניות של טסלה בחודש מאי האחרון, הציג מאסק את החזון שלו דרך הרובוט האנושי OPTIMUS. ה OPTIMUS שנראה כמו אדם, עם ראש זרועות, רגליים ומפרקים תואמים לגוף האדם, צפוי לחקות תנועה אנושית עגולה, תוך שהוא נע באופן עצמאי , מזהה עצמים על פי יכולת חישוב תלת מימדית וניגש אליהם בהתאם. עד היום בנתה טסלה חמישה אבות טיפוז של רובוטים מדגם OPTIMUS והם מסוגלים ללכת בסיבה רווית עצמים בעזרת סנסורים, מנועים ובקרים. הרובוט לומדת את הסביבה בעזרת מנגנוני חישה, מעבד את תמונת המרחב ומתרגם את האינפורמציה הזו לתנועה. היכולת הזו מתאפשרת בעזרת התבססות על הטכנולוגיה שפיתחה טסלה עבור המכוניות האוטונומיות שלה. השלב הבא בפיתוח לדברי מאסק הוא שילוב של בינה מלאכותית שתביא את יכולות הרובוט הכי קרוב לתפקוד של בני אדם. בסרטון שהוקרן, הדגימה החברה רגל רובוטית הבנויה בדומה לרגל אנושית עם מפרקי ברך וקרסול. בכדי להדגיש את רמת הגמישות של המפרקים, הרגל עולה ויורדת במהירויות שונות. כדי להראות את רמת הרגישות של החיישנים ויכולות חישוב מהירות התנועה הונחה על הרצפה ביצה. הרגל הביונית ירדה ונעצרה מספר מ”מ לפני הביצה מבלי לגעת בה. מתברר שבכדי ללמד את הרובוט לחקות תנועות אנושיות, לבשו החוקרים חליפת סנסורים שכללה רכיבי חישה ומצלמות והחלו לבצע פעולות תנועה בסיסיות שכללו הרמה והורדה של ידיים והליכה איטית. הטכניקה הזו מכונה Monkey See, Monkey Do, והיא תורגמה לאינפורמציה דיגיטלית שהוזנה לדגם וירטואלי של הרובוט שלמד אותה.

חליפת הסנסורים ללימוד תנועה אנושית
“מעט אנשים יודעים עד כמה טכנולוגיית הבינה המלאכותית של טסלה מתקדמת” , אמר מאסק לבעלי המניות. “אף חברה לא ממש קרובה ליכולות שלנו. אם הבינה המלאכותית מאפשרת לנו כיום נסיעה אוטונומית בכביש רווי מכוניות עם נהגים אנושיים, אין שום מגבלה להעתיק את יכולות החישוב ותפיסת המימד גם לרובוטים האנושיים שלנו”.
ה OPTIMUS לומד להבחין בין פריטים על ידי עיבוד תמונת תלת מימד, ואז לחשב כיצד לגשת אליהם ולבצע פעולות מוטוריות עדינות, כמו הרמה והנחה. הוא לומד תחילה את צורת האובייקט ובעזרת חישוב מהיר בוחר מהי הדרך הטובה ביותר לגשת אליו, תוך חישוב תנועות הגפיים הביוניות.
” OPTIMUS עדיין לא חושב כל כך עמוק, הוא בשלב שעדיין צריך “לחשוב” כיצד לגשת למשימות בסיסיות”, אומר מאסק. ” למשל הוא עדיין לא יכול להכין ביצה, מה גם שהזריזות שלו מוגבלת ביחס למה שאנחנו מתכננים לעתיד. אנחנו מייעדים אותו למשימות מסוכנות או כאלה שבני אדם נמענים מהן בדרך כלל. אבל לצד זאת, אנחנו מבינים שחייבים לבנות גם מנגנוני אבטחה בכדי שהמשימות הרובוטיות תהיינה בטוחות, ולא יהוו סכנה לסביבה. אני בכוונה מדגיש את המרכיב הזה של אבטחה ובטיחות, בלעדיו יהיה קשה להתקדם לשימוש נרחב ביכולות הללו”.
בהיבט הכלכלי, מאסק טען בהמשך כי ענף המוצרים הרובוטים של טסלה צפוי להיות גדול בהרבה מפלח השוק של המכוניות החשמליות שבו מחזיקה כיום החברה. הוא אומר שבעתיד כל אדם ירצה רובוט אנושי לצידו, ואולי יותר מאחד. כדי שאלה יעשו עבורינו משימות יומיומיות. לכן להערכתו בעתיד , כאשר הרובוטים האנושיים יכנסו לחיינו כמו המכוניות החשמליות , יעמוד המספר שלהם בין 10 ל 20 מיליארד.
הרגל הביונית בהדגמת מוטוריקה עדינה וחיישני קירבה ליד ביצה
מתברר שאילון מאסק לא לבד במירוץ ל “האנשה” של מערכות רובוטיות. בלקט הבטחוני של משרד הבטחון דווח על צוות מחקר משותף של אוניברסיטת בריסטול, אוניבסיטת פיזה באיטליה, וחברת Dexterous Robotics שמפתחות יכולת מגע אנושית למערכות רובוטיות. המטרה היא ליצור מגע עדין ככל הניתן ולאפשר למערכות ביוניות יכולות מישוש ואחיזה עדינה. הפיתוח מתבסס על כף יד ביונית שפיתחו החוקרים האיטלקים ומבוססת על כף יד אנושית. “הפיתוח נועד במקור לצורך איברים תותבים )פרוסתטיקה). החיישן נקרא TacTip. הוא יכול למצות מידע מתוך “עור” מודפס בהדפסת תלת מימד שהמבנה הפנימי שלו מזכיר עור אנושי” נכתב בלקט. “הפיתוח הנוכחי נועד להעניק לרובוטים יכולות מישוש, מגע ואחיזה הדומות ככל האפשר לתכונות של יד אדם. שימוש במספר חיישנים אופטיים בו -זמנית מצריך עוצמת מיחשוב גדולה. כדי לצמצם את הנטל החישובי החוקרים פיתחו חומרת “מוח” עם יכולת עיבוד מקבילי שיכולה לאסוף תמונות ממספר חיישנים בו-זמנית”.
קרדיט תמונות ותמונת כותרת: TESLA
