








בשנים האחרונות אנו עדים ליישום מסיבי של טכנולוגיות ומתודולוגיות חדשות בעולם התעשיה . מערכות הינע וזיהוי עצמים /סביבה מובילים את מרבית השינויים וסוללים את הדרך לעידן חדש באינטראקציה בין אדם ומכונה.

תמונה מס 1: מצב דו-קיום
בעידן החדש קיימת אינטראקציה בין אדם למכונה העובדים בצוותא באותו תא עבודה . הרעיון הינו שילוב חכם של יכולות האדם ביחד עם יכולות הרובוט המאפשר ייצור המאופיין באיכות גבוהה יותר , גמישות ייצור גבוהה יותר , הורדת עלויות הייצור וסבבי ייצור מהירים וקצרים יותר.
על מנת להוציא לפועל שילוב שכזה נדרשים האנשים להתערב בתהליך הייצור ללא מגבלות מחד אך גם לא סכנת פגיעה מאידך. על כן אנו נדרשים להגן ולמגן את המערכות מול כל הסכנות הצפויות לבני האדם בשילוב קרוב שכזה.
אינטראקיצה אדם רובוט והבטי הבטיחות
יישום של פרויקטי תעשיה 4.0 ( INDUSTRY 4.0 ) יוצר צורך ביישום והטמעה של מכונות ייצור גמיש היכולות לעבוד בצורה אוטונומית אך ניתנות להתאמה מהירה ויעילה של תנאי ייצור משתנים.
על מנת להגן על אנשים ממכונות מהירות , תנועות חדות וכוח . לכן אנו רואים כיום את רוב הרובוטים עובדים מאחרוי גדרות ורשתות. אך כאשר נדרשת אינטראקציה קרובה בין אדם לרובוט ת ההפרדה הפיזית הזו לא יכולה להתקיים ואנו נדרשים למערך אחר של הגנה על בני האדם בסבית הרובוט.
ניתן לסווג את האינטראקציה בין אדם לרובוט או למכונות דמוי רובוט על ידי שני פרמטרים : זמן ומיקום. באם אין זמן משותף ואין מיקום משותף עם האדם בעת עבודת הרובוט אזי אין כל סכנה לאדם והמצב אינו מוגדר כאינטראקציה אדם רובוט. כאשר אדם ורובוט חולקים חולקים אותו מקום אך זמנים שונים מצב זה נקרא שיתופי . כאשר אדם ורובוט נמצאים במיקום שונה באותו הזמן מצב זה נקרא דו-קיום .
כאשר אדם ורובוט חולקים את אותו מיקום באותו הזמן מצב זה נקרא שיתוף פעולה.
דן-קיום ( Coexistence )
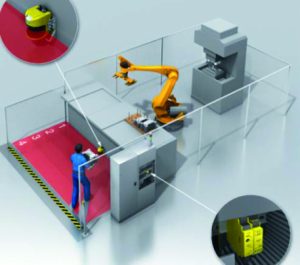
תמונה מס 1: מצב דו-קיום
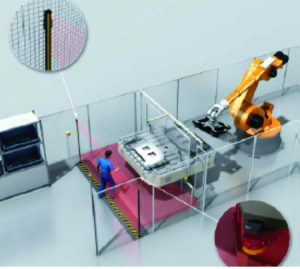 מצב זה הינו המצב הבסיסקיים גם ברובוטים תעשייתים פשוטים. האדם נדרש להתקרב לרובוט לצרכי טיפול ואחזקה. במקרים כאלו הרובוט נמצא מאחרוי גדרות הגנה ודלתות הכניסה מוגנות על מנעלוי בטיחות המאפשרים כניסה רק לאחר שהרובוט עצר או פתיחת הדלתות עוצרת את הרובוט. נדרש לוודא כי הרובוט מושבת כל זמן שהאדם נמצא בתוך תא הרובוט או כל זמן שהדלת פתוחה. קיימות כיום מערכות בשוק המאפשרות הפעלה מחדש רק לאחר שהאדם שנכנס לתא הרובוט ביצע סדרת פעולת המאפשות את הרובוט מאפשרות הפעלה מחדש שלו.
מצב זה הינו המצב הבסיסקיים גם ברובוטים תעשייתים פשוטים. האדם נדרש להתקרב לרובוט לצרכי טיפול ואחזקה. במקרים כאלו הרובוט נמצא מאחרוי גדרות הגנה ודלתות הכניסה מוגנות על מנעלוי בטיחות המאפשרים כניסה רק לאחר שהרובוט עצר או פתיחת הדלתות עוצרת את הרובוט. נדרש לוודא כי הרובוט מושבת כל זמן שהאדם נמצא בתוך תא הרובוט או כל זמן שהדלת פתוחה. קיימות כיום מערכות בשוק המאפשרות הפעלה מחדש רק לאחר שהאדם שנכנס לתא הרובוט ביצע סדרת פעולת המאפשות את הרובוט מאפשרות הפעלה מחדש שלו.
מצב שיתופי ( Cooperation )
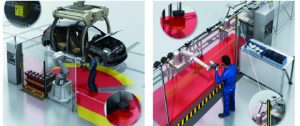
כיום זהו המצב הנפוץ ביותר בתעשיה , אדם מעמיס מוצרים לרובוט או פורק מוצרים מהרובוט. כאשר האדם מתקרב לרובוט אזי הרובוט עוצר או אינו מבצע תנועות מסוימות , יצא ההאדם מהאזור המוגדר והרובוט חוזר לפעילות רגילה. כלומר האדם והרובוט עובדים באותו מרחב אך בזמנים שונים. כאן אנו נדרשים ליישם אמצעים טכנולוגיים על מנת להבטיח את בטיחות האדם . בהתאם למבנה המערכת וצורת העבודה נהוג להשתמש כאן ,בין שאר הפתרונות , בוילונות בטיחות או בסורקי לייזר בטיחותיים ( SAFETY LIDARS ) .
מצב שיתוף פעולה ( Collaborative )
קיימים כיום מצבים באים אנשים ורובוטים נדרשים לשתף פעולה באותו זמן ובאותו חלל עבודה . במקרים אלו של שיתוף פעולה ( והנקראים Collaborative ) נדרש להגביל את מהירות הרובוט , הכוח של הרובוט וכן מגבלת על מסלולי התנועה של הרובוט. יש ליישם בנוסף אמצעי בטיחות מבניים/אינטגרטיביים להקטנת הסיכון כגון מגבלה על המומנט באמצעות פונקציות הבטיחות בדרייברים או בבקרי התנועה ( Motion controllers safety functions) ועוד.
מהירות ,כוח ומסלולי התנועה של הרובוט וחלקיו השונים חייבים להיות תחת בקרה מתמדת ומיידית על מנת להקטין את סיכון האדם ויש לשלוט בהם כפונקציה של דרגת הסיכון. דרגת הסיכון נקבעת בנוסף גם על ידי מרחק האדם מהרובוט.
שימושים כאלו מצריכים הטמעה של טכנולוגיות מתקדמות של חיישני בטיחות המזהים נוכחות של אנשים וכן מהירות / צורת תנועתם לכיוון אזור הסכנה ובתוכו.
חיישני בטיחות אלו נדרשים לתת מענה גם לצרכי ואתגרי הבטיחות העתידיים הנובעים משימוש הולך וגובר בצורה זו של שיתוף אדם-רובוט תוך שימוש ברובוטים שיתופיים.
תמונה מס 3: מצב שיתוף פעולה
קיימים כיום תקנים בינלאומיים המגדרים מה הם שיתופי פעולה אדם-רובוט בטיחותיים . תקנים אלו כדוגמת ISO10218-2 או ISO15066 מגדירים בין השאר דרישות בסיסיות לתיכנון ויישום שיתוף פעולה בטיחותי בין רובוט לאדם. כך למשל בתקן מוגדר שבעת התיכנון יש לתת דגש על יכולת האדם לעבוד בחופשיות בסביבת הרובוט תוך ביטול כל סכנה מהרובוט או ציוד אחר בסביבת העבודה. כמו כן נדרש לתת את הדעת על תיכנון נכון ובטיחותי של הרובוט תוך שימוש במספר תנועות מסוכנות מינימלי , הטעמת אמצעי בטיחות אינטגרליים בהינע ובקרת הרובוט אשר יגבילו את המהירות ,מומנט ומסלולי תנועה על מנת לשמור על בטיחות האדם בסביבת הרובוט.
תקן ISO/TS 15066:2016 מגדיר את דרישות הבטיחות מרובוטים שיתופיים ומגדיר מהן פעולות שיתוף פעולה בטוחות אדם רובוט , להלן מספר דוגמאות :
- בקרת בטיחות על עצירה
הרובוט עוצר לגמרי בעת האינטראקציה עם האדם בחלל העבודה. מצב העצירה מבוקר בצורה רציפה ומערכת ההינע יכולה להיות עדיין תחת מתח. - בקרה ידנית על הרובוט
בטיחות האדם נשמרת על ידי הנעה ידנית/פיזית של הרובוט על ידי האדם. נדרשת בקרה רציפה של מהירות איטית מותאמת. - הגבלת כוח והספק
מגע פיזי בין הרובוט לאדם באם במכוון או שלא במכוון אינו פוגע באדם בכל צורה שהיא. ניתן להשיג זאת על ידי הגבלת ההספק והכוח לרמות כאלו אשר לא יפגעו באדם.
קיימים כיום רובוטים אשר תוכננו מראש תוך מטרה שיתוף פעולה מבוסס מגבלת הספק וכוח. הגדרת מגבלות ההספק והכוח הינה בהתאם להגדרות התקן אשר מכתיב נתוני עומס ביומכני מירביים בעת מגע של רובוט עם איברי גוף האדם. - בקרה רציפה של מרחק ומהירות
מהירות ומסלול התנועה של הרובוט נקבעים בהתאם למהירות וצורה התנועה של האדם בחלל העבודה תוך שמירה על מרווחי ביטחון.
ניתן לומר שככל ששיתוף הפעולה בין האדם לרובוט הדוק יותר יש דרישה מחמירה יותר של אמצעי הבטיחות הנדרשים על מנת להבטיח את שלום ובטיחות האדם
לסיכום ,

תמונה מס 4: חשיבות הפעולות להגברת בטיחות האדם בסביבת הרובוט
המגמה של שיתוף פעולה אדם רובוט תלך ותגדל עם הזמן . אדם ורובוט יעבדו בשיתוף פעולה צמוד יותר . כבר כיום אנו רואים החלפה הלוכת וגדלה של הרכבות ידניות בהרכבות בהן אדם ורובוט משתפים פעולה תוך ניצול יכולות האדם והרובוט המשלימות אלו את אלו. בסופו של דבר נידרש להתאים את הדרישות הארגונומיות של האדם באזור העבודה על מנת להגיע ליעילות עבודה גבוה. וכן נידרש למצוא את האיזון העדין בין הגבלת הרובוט לשמירה על בטיחות האדם מול הדרישה ההולכת וגוברת להגדלת יעילות ומהירות הייצור.
חשוב לזכור כי אין שימוש אחד של רובוט דומה לרעהו והבסיס לכל תיכנון ושימוש בטכנולוגיות כאלו ואחרות להגנה על האדם יקבע רק לאחר ביצוע סקר סיכונים מקיף על ידי מי שהוסמך לכך. הדבר נכון גם אם הרובוט שבשימוש תוכנן על ידי היצרן בהתאם לכל התקנים הרלוונטיים. האחריות הינה לוודא שאינטגרציה של הרובוט לתוך סביבת העבודה תואמת את כל דרישות הבטיחות וכן כי יושמו אמצעי בטיחות נוספים (כגון וילונות בטיחות ,סורקי לייזר בטיחותיים , מהולי דלתות בטיחותיים ועוד ) על מנת לשמור על בטיחות האדם.
