





Dr. Matthias Mendel,
Harmonic Drive and Dr. Peter Stipp
קטן וקל, אך גם מדויק ודינמי ביותר – אלו הדרישות ממערכות הנעה מודרניות. בשנים האחרונות נולד לו דור חדש של תמסורות וגירים הרמוניים המציע לא רק יחס כוח- משקל משופר, אלא גם מאפשר עבודה תחת עומסים גבוהים בהרבה ותוחלת חיים ארוכה יותר.
"שן תחת שן"
דרישות התעשייה למערכות מדויקות ואמינות יותר ויותר, מצריכות בחינה מחדש של טכנולוגיות ההנעה. בפרט, יש לקחת בחשבון את הדרישות לגבי מרחב ההתקנה ומשקל מערכת ההנעה וכן לגבי שיפור הדיוק והדינאמיות. הדבר מתאפשר רק בעזרת רמה גבוהה של אינטגרציה של כל הרכיבים של מערכת ההנעה, החל בתשלובת גלגלי השיניים והמנוע, דרך המיסבים וכלה במערכת ההיזון החוזר (
feedback) ומבנה תא האכסון (housing). ע"מ להיענות לדרישות אלו, חובה שכל רכיב במערכת הנעה שכזו יהיה בקדמת הטכנולוגיה ושייושמו בה כל הפיתוחים האחרונים בתחומי ההנדסה, טכנולוגיית המיסבים, הסיכה, מערכות המגנט ומערכות ההיזון החוזר.
יישומים

בתמונה: 3 חלקי הגיר השונים (Wave Generator, Flexspline, Circular Spline)
היישומים העיקריים לטכנולוגיית הגירים ההרמוניים כוללים רובוטיקה תעשייתית ושירותית, תעשיית המוליכים למחצה, תעשיה סולארית, מכונות מדידה, מערכות אופטיות, טכנולוגיה רפואית ותעשיית מכונות הכלים. ישומים נוספים ניתן למצוא בתחום הצבאי – בטחוני, בין אם באוויר, בים או ביבשה. מגמה זו של התקדמות לשימוש בתמסורות הרמוניות אלו במכונות מדויקות ויעילות יותר תופסת תאוצה כמעט בכל התחומים.
טכנולוגית הגיר ההרמוני ניתנת ליישום במספר צורות. הבסיסית שבהן היא כגיר (
ComponentSet) בעל 3 חלקים, כאשר במצב זה נדרש מתכנן המערכת להשקיע משאבים הנדסיים נוספים בבחירה של שאר חלקי המערכת ובהתאמה בינהם. לחילופין, מתכנני ומפתחי מערכות רבים בוחרים להשתמש בפתרון המלא של אקטואטור (Actuator) המשלב את טכנולוגית הגיר ההרמוני יחד עם מיסב יציאה, מנוע (AC/DC), מערכת היזון חוזר (Feedbacksystem) ועוד, בהתאם לדרישות המערכת.
לזהות את הדרישות בתמסורות ובמנועי סרוו, חייבת תפיסת העבודה להתקדם לכיוון של צמצום שטח ההתקנה והמשקל, בעוד שדינמיות ודיוק משופרים ממלאים תפקיד חשוב בשיפור יעילות המכונות.
בתמונה: Path of tooth engagement
אילו פתרונות מציעה הטכנולוגיה לדרישות שנזכרו לעיל?
כדי להגדיר את כיוון ויעדי הפיתוח של תמסורות מדויקות ומנועי סרוו, חשוב לדעת מראש (ובאופן מפורט) את היישומים העתידיים ודרישותיהם. חשוב שגם הדרישות הטכניות יבואו על פתרונן בצורה מקיפה. ישנן 4 דרישות טכניות המגדירות במדויק את יעדי הפיתוח: א. צמצום בזמן שינוי המיקום – תהליך היוצר מערכות הנעה דינאמיות יותר ובכך מאפשר להגדיל את העומס המופעל בזמן ההאצה (
accelerationtorques). ב. מוצרי קצה מתוחכמים דורשים הנעה חלקה ומדויקת יותר. שתי הנקודות הראשונות קשורות לדרישות שטח ומשקל של מערכות הנעה נייחות וניידות, וכן לשיפור בר-קיימא של יעילות המערכת כולה.
בנוסף, תהליכי מיקום מורכבים ומשטחים מושלמים בייצור ועיבוד ממוכן (
workpiecemachining) דורשים שהגירים יהיו ללא רתיעה (כלומר ZeroBacklash) לכל אורך חייהם ובנוסף בעלי הפעלה חלקה של כל מערכת ההנעה. לעניין הגירים, פירוש הדבר הוא בבחירה מדויקת של החומרים ועיצוב פרופיל השן בשילוב עם אופטימיזציה בתהליך הייצור של השיניים. הפיתוח של דורות חדשים של גלגלי שיניים, שלוקח בחשבון את האופן המיוחד בו משתלבת שן אחת בשניה (meshing), יוצר שיניים אופטימאליות. הדבר מתאפשר הודות לעשרות שנות ניסיון במחקר ובפיתוח של טכנולוגיית הגירים ההרמוניים.
ביצוע סימולציות מפורטות לכל אורך תהליך עיצוב הגיר והמנוע, מבטיח ייצור של רכיבים יעילים מאד וחסכוניים במקום. למבנה המודולארי יש גם חשיבות בזמן העיצוב והייצור של הרכיבים הבודדים, דבר המוביל לעלייה ברווחיות ובגמישות.

בתמונה: זרוע רובוטית DLR Miro במהלך כירורגיה ניסויית ב-telesurgery (ניתוח ההמזער את הפולשנות למינימום האפשרי)
קיצור זמני הפיתוח
שיפור ביצועי היצור של תמסורות מדוייקות תוך שמירה על המאפיינים הנדרשים (כגון אפס חופש/רתיעה
(
zerobacklash), דיוק בהעברת התנועה (transmissionaccuracy), קשיחות סיבובית (torsionalstiffness) וחזרתיות (repeatability)) – פירושו להגדיל באופן ניכר את העומס המירבי אותו יכול הגיר לשאת, במסגרת אותן מגבלות של שטח ההתקנה. דר' מתיאס מנדל (Dr. MatthiasMendel), ראש מחלקת העיצוב והפיתוח בחברת הרמוניק דרייב איי ג'י (HarmonicDriveAG) מסביר: "המשכנו לשפר את החומרים והרכיבים שלנו. לצורך כך בנינו מודלים של סימולציות מקיפות כדי למזער את זמני הפיתוח".
טכנולוגית ההנעה
"המטרה איננה להעריך את טווח הרעיונות שעולים בסיעור מוחות על בסיס מספר גבוה של אבי טיפוס שייוצרו, אלא להדגים אותם כבר בשלב הסימולציה. הדבר שיפר משמעותית את תפיסת הפיתוח ותרם רבות לפיתוח דור חדש של גירים הרמוניים, בעל ביצועים משופרים באופן משמעותי (“
CobaltLine”). תהליך הפיתוח הושלם בהצלחה וכעת אף מומש עבור גודל אחד בהצלחה. עם מתאר Flexspline חדש לגמרי וטיפול בחום אופטימאלי, הצלחנו להעביר עומסים גדולים ב-30% באמצעות רכיב זה", אומר דר. מתיאס מנדל, ואף מוסיף: "הודות לגיאומטריה האליפטית המשופרת של ה-wavegenerator וצורת שיניים חדשה ב- Flexspline וב-circularspline, גם אורך החיים של הגיר והזמן בין טיפול שירות אחד לשני יגדלו באופן ניכר". תופעת לוואי חיובית של הגדלת מומנט הסיבוב המרבי המותר לאותן מידות ובאותו משקל הוא יחס כוח/משקל משופר. זה יכול לעלות מ- 293Nm/kg בגיר סטנדרטי ל-382Nm/kg וזהו מהלך נוסף בכיוון של הפחתת משקל.
כך, שינתה החברה – או שיפרה – את כל שלושת הרכיבים שמרכיבים כל גיר הרמוני: ה-
wavegenerator המרכזי כרכיב המונע; ה-Flexspline שמקיף אותו (שרוול פלדה גלילי גמיש עם שיניים חיצוניות); ו-circularspline חיצוני – טבעת גלילית עם שיניים בחלק הפנימי.
ה-
wavegenerator האליפטי מסיט את
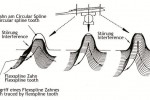
ה-Flexspline בעלת הדפנות הדקות במהלך ההרכבה כך שה-Flexspline מתרחב לצורת קונוס באזור הקרוב לציר הגדול של האליפסה. ההתרחבות לצורת קונוס גורמת לשיניים של ה-Flexspline לנטות. כתוצאה, השיניים לא נעות במקביל לציר המרכזי של רכיב זה. הודות לתופעה זו, שן ה-Flexspline מתואמת לשיניים שמנגד של ה-circularspline בעומקים שונים, תלוי במצב הצירי (מעל לרוחב השן). באותו זמן, הנתיב לכאורה של שן ה-Flexspline משתנה, תלוי במצב הצירי מעל לרוחב השן. בכיוון של Flexspline סגור, הנתיב של שן ה-Flexspline נהיה שטוח, כך שלא רק שהחפיפה בכיוון הרדיאלי מצטמצמת, אבל ההתערבות (כלומר התערבות התיאום) יכולה גם להתרחש באזור שבו מתחיל מגע שיניים בין שן ה-Flexspline ושן ה-circularspline. מאידך, באזור של פתח ה-Flexspline השן מותאמת הכי עמוק לתוך הפער בשן של ה-circularspline.
באזור זה, העמסת-יתר מוגדרת מראש (
Preloading) – ההעמסה המוקדמת של הגיר ההרמוני ממומשת בשיניים. אם צורת השן אינה מעוצבת בצורה אופטימאלית, או אם השן לא מתוקנת, עלולה להתרחש התערבות גם כאן. אנחנו משתמשים ב-endrelief (הסרת חומר בקצה) בכדי לקבוע התנהגות תיאום אופטימאלית. כך משיגה שן ה-Flexspline קיזוז פרופיל משתנה (variableprofileoffset) לכל רוחב השן.
רובוטיקה כירורגית קלת-משקל
צפיפות הספק גבוהה, משקל קל ותשלובת שיניים ללא חופש (0
backlash), הינם המאפיינים העיקריים של התמסורת והגירים ההרמוניים. הדבר מאפשר שימוש במוצרים למטלות שדורשות מיצוב מדויק מאד ובקרת סיבוב עדינה – אידיאלי לרובוטים קלי משקל. כתוצאה, טכנולוגיה זו משמשת במערכות מחקר רבות במכון לרובוטיקה ומכטרוניקה במרכז התעופה הגרמני (DLR).
השימוש הגובר ברובוטים קלי משקל במגע ישיר עם בני אדם דורש מערכות יותר ויותר קומפקטיות בעלות מספר הולך וגדל של חיישנים משולבים המסוגלים לחוש את הסביבה. דוגמא טיפוסית לכך היא זרוע רובוטית
DLRMiro בעלת 7 דרגות חופש, משקל נטו של פחות מ-10 ק"ג ועומס מרבי של 3 ק"ג.
הדבר פותח עבור טווח רחב של יישומים רפואיים – כולל, בין היתר, עבור
telesurgery (ניתוח פולשני בצורה מינימלית). בנוסף לדיוק מרבי וחוזק בשימוש, הצמצום במקום פנוי על שולחן הניתוחים, הינו בין האתגרים הגדולים לקומפקטיות של המערכת, בעיקר במבנה רב-זרועות.
אומר
Dr. UlrichHagn מהמחלקה למערכות רובוט ב-DLR: "בגלל שיש להימנע מלולאות כבלים חיצוניים מטעמי היגיינה, שינוי המיקום של רתמת הכבלים כך שתעבור דרך המפרקים הקומפקטיים היווה צוואר-בקבוק ביישום זה. למעשה, עיצוב הגל החלול (hollowshaft) של הגירים ההרמוניים היווה עבורנו פתרון אידיאלי".
בנוסף, מנועי סרוו ופתרונות הנעה תפורים למידות הלקוח נותנים רמה גבוהה של אינטגרציה ומצמצמים את זמן העיצוב והפיתוח ההנדסי עבור הלקוח, ובנוסף קיימת ערכת ההתקנה הסטנדרטית. כך, השילוב של תכונות אפס החופש (
zerobacklash), המשקל הקל ועיצוב הגל החלול (hollowshaft) מהווה את הסיבה לשימוש בתמסורות הרמוניות בזרוע רובוטית DLRMiro, על פני גירים פלנטריים וציקלואידים – אפילו למידות גיר קטנות.
