









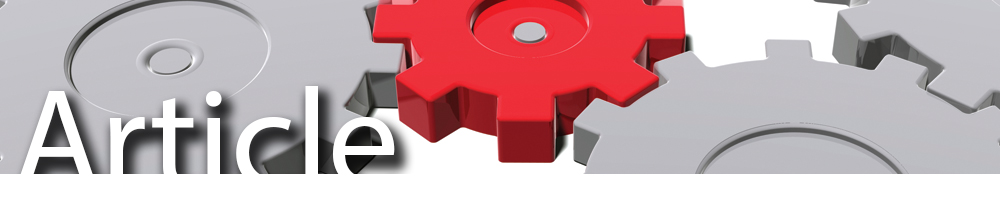
 מעבדים מהירים ואנקודרים ברזולוציה גבוהה יותר מאפשרים ליישם חידושים מדהימים בטכנולוגית הכיול. "בקרה חזויה על פי מודל" (- Model Following Control) ודיכוי רעידות הינם שני חידושים מבית הפיתוח של חברת Yaskawa שניתן ליישם בהצלחה במערכות סרוו מורכבות. כיול סרוו הינו ההתאמה של תגובת מערכת בקרה חשמלית למערכת מכאנית המחוברת אליה. מערכת בקרה חשמלית מורכבת מבקר PLC (בקר לוגי מיתכנת) או בקר תנועה, ששולח אותות למגבר סרוו, אשר גורם למנוע הסרוו להניע את המערכת המכאנית. מנוע הסרוו – מכשיר אלקטרו מכאני – משמש כמרכיב קריטי המאחד את שתי המערכות. ניתן להסיק רבות מתוך מערכת הבקרה החשמלית בכדי לחזות את ההתנהגות של המערכת המכאנית. במאמר זה, נחקור שתי טכניקות של טכנולוגית כיול סרוו מודרנית שפותחו בחברת יאסקווה (Yaskawa Electric Corporation, Japan), בקרה חזויה על פי מודל (MFC) ודיכוי רעידות, ושיקולים ברמת היישום שלהם.
מעבדים מהירים ואנקודרים ברזולוציה גבוהה יותר מאפשרים ליישם חידושים מדהימים בטכנולוגית הכיול. "בקרה חזויה על פי מודל" (- Model Following Control) ודיכוי רעידות הינם שני חידושים מבית הפיתוח של חברת Yaskawa שניתן ליישם בהצלחה במערכות סרוו מורכבות. כיול סרוו הינו ההתאמה של תגובת מערכת בקרה חשמלית למערכת מכאנית המחוברת אליה. מערכת בקרה חשמלית מורכבת מבקר PLC (בקר לוגי מיתכנת) או בקר תנועה, ששולח אותות למגבר סרוו, אשר גורם למנוע הסרוו להניע את המערכת המכאנית. מנוע הסרוו – מכשיר אלקטרו מכאני – משמש כמרכיב קריטי המאחד את שתי המערכות. ניתן להסיק רבות מתוך מערכת הבקרה החשמלית בכדי לחזות את ההתנהגות של המערכת המכאנית. במאמר זה, נחקור שתי טכניקות של טכנולוגית כיול סרוו מודרנית שפותחו בחברת יאסקווה (Yaskawa Electric Corporation, Japan), בקרה חזויה על פי מודל (MFC) ודיכוי רעידות, ושיקולים ברמת היישום שלהם.
מהר יותר, טוב יותר,
הרבה יותר
מעבדים מהירים יותר נמצאים כיום בכל מקום, ומגברי סרוו בכללם. בעבר, מעבדים אלו אשר היוו מיכשול מבחינת העלות שלהם עשו את דרכם לתוך מגברי הסרוו, תוך שהם מאפשרים אלגוריתמי בקרה מורכבים ויעילים יותר. לדוגמא, לפני עשר שנים, רוחב פס של 100 או 200 הרץ בחוג המהירות היה הרוחב פס הסטנדרטי ואילו כיום עם קצב המעבדים הנוכחי, התדר יכול להיות הרבה מעבר 1000 הרץ.
מעבר לפתרון חוגי בקרה, מעבדים מהירים יותר מאפשרים למגברי הסרוו לערוך ניתוח משולב בזמן אמת של מומנט, מהירות ומיקום במטרה לגלות מאפייני מכונה שבעבר לא ניתן היה לזהות. כיום ניתן ליישם מודלים מתמטיים שונים בתוך מגבר הסרוו לניצול היתרונות של אלגוריתמי בקרת כיול מתקדמים, הרבה מעבר לכיול PID סטנדרטי.
זאת ועוד, מעבד מהיר יותר יכול גם להתמודד עם נתונים מאנקודר ברזולוציה גבוהה יותר, אם כי הרזולוציה המשופרת לא נותנת למערכת ביצועי מיצוב טובים יותר. הגורם המגביל הוא בדרך כלל מיצוב המערכת המכאנית, לא האנקודר – אך אנקודר בעל רזולוציה גבוהה יותר מאפשר למערכת הבקרה להבחין במיקרו תנועות שאינן ניתנות להבחנה ע"י אנקודר ברזולוציה נמוכה יותר. התנועות הקטנות הללו הן לעתים קרובות תוצאה של רעידות או תהודה, ואם יתגלו, יוכלו לספק מידע חשוב להבנה, ניבוי ופיצוי של התנהגות המערכות המכאנית.
בקרה חזויה
על פי מודל (MFC)
בקצרה, בקרה חזויה על פי מודל (MFC) אשר פותח במעבדות Yaskawa ביפן, עושה שימוש במשוב התנועה על מנת לחזות מומנט ומהירות בעתיד. אם המהירות והמומנט למהלך מסוים ידועות פחות או יותר, אזי אין צורך לאלץ באופן עיוור את פרופיל התנועה דרך חוג ה-PID, המגיב רק לשגיאות. במקום זאת, הרעיון הוא לספק את המהירות והמומנט החזויים כהזנה קדימה (Feed Forward) לחוגי בקרת הסרוו ולתת לחוגים להגיב לשגיאה המינימאלית שנותרה.
כדי שכל זה יעבוד בצורה נכונה, המגבר חייב להכיל מודל מתמטי תקף של המכונה, המבוסס על מאפיינים כגון אינרציה, חיכוך, וקשיחות. ניתן להחדיר את פרופיל המומנט והמהירות של המודל לתוך חוגי הסרוו, לקבלת ביצועים מוגברים. מודלים אלה עושים שימוש בפונקציות מתמטיות מורכבות, אבל הודות למעבדים מהירים יותר במגבר הסרוו, תעשיית בקרת התנועה מתחילה לראות את יישומן.
למרות יתרונותיה הרבים, לבקרה חזויה על פי מודל (MFC) יש מגרעה: היא עובדת נהדר במיצוב מנקודה לנקודה, אלא שזה בא על חשבון עיכוב זמן בעת ההעברה. אלמנט הזמן הינו טבוע בבקרה חזויה על פי מודל מכיוון שהתנועה האחרונה משמשת לחיזוי התגובה העתידית. בשל עיכוב זה, לא ניתן לפעול על פי פרופיל הפקודה המדויק של הבקר. במקום זאת, נוצר פרופיל דומה המאפשר מיצוב מהיר בסוף המהלך.
דיכוי רעידות
בשל אופייה של בקרה חזויה על פי מודל (MFC), לא ניתן לפעול על פי פרופיל הפקודה המדויק של הבקר. נוצר פרופיל דומה המאפשר מיצוב מהיר בסוף המהלך, אך בעיכוב קל בתחילת המהלך.
אחד ההיבטים השימושיים ביותר של בקרה חזויה על פי מודל הוא היכולת לדגום, לחזות ולדכא רעידות בתדר נמוך במכונה. רעידות יכולות להתרחש במכונה בתדרי הרץ חד ספרתיים ועד לאלפי הרץ. רעידות בתדר נמוך מ-1s ועד לעשרות הרץ, מורגשות לעתים קרובות בתחילה וסוף המהלך, הדבר הינו בעייתי במיוחד משום שהוא התדר בו פועלות המכונות.
מבנים מכניים מסויימים (לדוגמה, מכונה עם זרוע תפס ארוכה ודקה) נוטים להפגין תדר תהודה נמוך מאחרים. עיצובים כאלה הנוטים לרעידות עשויים להידרש להחדרת רכיב דרך פתח למשל. גם מכונות גדולות נוטות לרעידות, כיוון שאלה בד"כ עשויות מחלקים גדולים שנעים בתדרים נמוכים. בסוג זה של יישומים, תנודות תופענה כאשר המנוע בסוף מהלך. טכנולוגית דיכוי רעידות במגבר הסרוו מפחיתה באופן משמעותי תנודות מכונה כאלו.
בקרה חזויה על פי מודל (MFC) במערכת סרוו בעלת מנועים צמודים
היישום של בקרה חזויה על פי מודל במפעיל בעל ציר אחד הינו פשוט, וחריגה מפרופיל הפיקוד המדויק היא חסרת חשיבות עבור תנועה מנקודה לנקודה. עם זאת, כאשר ציר סרוו אחד קשור באופן מכאני למשנהו, פרופילי התנועה שלהם משפיעים זה על זה. מערכת הנעה של 2 מנועים המניעים ציר בורגי אחד הינה דוגמה לתצורה כזו.
מערכת בדיקה אופיינית לניתוח רעידות עושה שימוש במפעיל מחובר למוט הברגה, המחזיק דיסקיות (לתוספת משקל) בקצהו.
תצורה זו של מנוע כפול מהווה יתרון ביישומים גדולים בהם המומנט הנדרש בכדי להאיץ את הרוטור של המנוע הינו משמעותי ובהם מנוע יחיד לא יהיה מסוגל להפיק את המומנט והתאוצה הנדרשים. מנקודת מבט של כיול, הגורם המכריע הוא ששני מנועי סרוו גדולים יחסית מניעים מטען כבד, ופועלים במומנט ומהירות כמעט מירביים. אם יצאו המנועים מסינכרון, המומנט שלהם יבוזבז על לחימה זה בזה לצורך השמירה על המיקום הזהה. עם זאת, אם ההגבר של שני המנועים שווה, אז עיכובי הבקרה חזויה על פי מודל יהיו גם הם שווים והמנועים יישארו מסונכרנים האחד עם השני.
הצעד הראשון בכיוון יישום שכזה הוא להסיר פיזית את אחד המנועים ולכוון את המערכת כרגיל עם מנוע אחד בלבד. מנוע סרוו אחד מספיק לבקרת ציר יציבה, אבל לא מייצר מספיק מומנט בכדי להפעיל את הפרופיל הנדרש. במקרה זה, נעשה שימוש ברצף הכיול האוטומטי של היצרן, אשר קובע פרמטר אינרציה ומאפשר את חיזויה של תכונת הבקרה על פי מודל.
הערה: הגבר המערכת הקיים עם מנוע אחד, בסופו של דבר חייב להיות מחולק באופן שווה בין שני המנועים. פרמטר האינרציה מקל על העניין, כיוון שהוא פועל כגורם מאזן מידה להגבר חוגי הסרוו, וכך הוא מוגדר למחצית תוצאת הכיול המקורית בכל מגבר. את שאר תוצאות הכיול ניתן אז להעתיק מציר 1 לציר 2. ההתאמה הסופית הינה בהסרת רכיב האינטגרציה מציר 2, הקצאת תפקיד הסיוע בהאצה למנוע השני והשארת תיקוני השילוב הקטנים למנוע אחד לבדו.
בקרה חזויה על פי מודל (MFC) ודיכוי רעידות בתנועות דו-מימדיות XY
מעבר על קווי מתאר XY הוא עוד דוגמא ליישום שבו ציר סרוו אחד קשור באופן מכאני לציר אחר. במקום מיצוב מהיר, המטרה כאן היא להשיג נתיב תנועה חלק ועקבי. בהתחלה, זה אולי לא נראה מתאים להחלת בקרה חזויה על פי מודל (MFC) בגלל עיכוב הזמן.
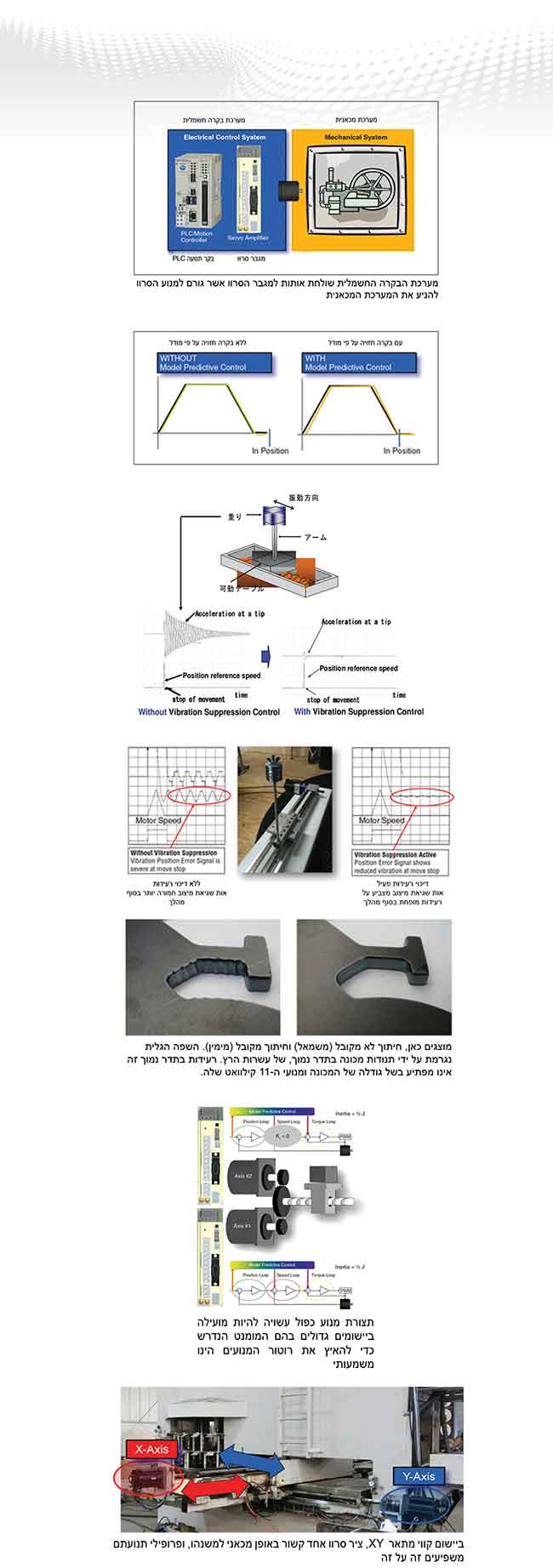
חשוב על מכונה המורכבת משולחן פלדה כבד (ציר Y) ומפעיל מחובר לחתיכת הפלדה המעובדת (ציר X). שני הצירים הללו נעים בתנועות חלקות בעוד שמבער פלזמה נייח חותך את הצורה הרצויה.
גרף של מהלך בדיקה מגלה רעידות בתדר נמוך האחראי להופעה הגלית בחלק המתכת החתוך. כאן בדיוק נדרש היבט דיכוי הרעידות של בקרה חזויה על פי מודל (MFC). אבל מה בנוגע לעיכוב הזמן של בקרה חזויה על פי מודל (MFC) ושגיאות המיקום המשויכות לה? לתנועה דו-מימדית, יש לפצל את שגיאת המיקום באופן שווה בין צירי X ו-Y, אחרת מעגלים יהפכו לאליפסות וכל ממדי החלק יתעוותו. בנוסף, שגיאת המיצוב חייבת להיות נמוכה. במכונה המסוימת הזו, הבקר מסתמך על משוב שגיאת מיקום לאיתור היתקעות המכונה בכדי לעצור את התנועה שלה לפני שנגרם נזק לציוד.
מושג הכיול עבור יישום שכזה כרוך בשני שלבים. השלב הראשון הינו לכוון כל ציר בנפרד באמצעות תכונת הכיול האוטומטי של חברת Yaskawa כנקודת התחלה, ולאפשר בקרה חזויה על פי מודל (MFC). דיכוי הרעידות מיושם גם הוא. בסופו של שלב זה, לכל ציר יש תגובה נקיה וחלקה עם רעידות מינימאליות.
בשלב השני, מפעילים את שני הצירים יחד, תוך ניטור השגיאות במהלך "ריצה יבשה" מנקודת מבט של הבקר. בתחילה נקבע את ההגברים של הבקרה החזויה על פי מודל (MFC) ברמה שווה, ניסוי וטעייה יעזרו לקבוע את ההגדרות הטובות ביותר עבור הגבר בקרה חזויה על פי מודל (MFC) שמאזן שגיאות מיקום נמוכות, שגיאות שוות במיקום, ותנועה חלקה. הרעיון הוא שאם שגיאת המיקום הינה זהה, אז שני הצירים מעוכבים באותו פרק זמן, והחלק נחתך במידות הנכונות למרות שהשגיאות במיקום גבוהות בזמן התנועה.
ביישום קווי מתאר XY, ציר סרוו אחד קשור באופן מכאני למשנהו, ופרופילי תנועתם משפיעים זה על זה.
סיכום
במאמר זה הצגנו כיצד חדשנות טכנולוגית מבית Yaskawa Electric, Japan מאפשרת למשתמש הקצה יכולות בקרה מייטבית. כיצד פתרון מבנים מכניים מורכבים, אשר עד היום הפתרון הנדרש היה על ידי שיפור המבנה המכני, ניתנים לבקרה מדויקת ללא כל שינוי המבנה אלא על ידי שימוש במוצרי Yaskawa המיישמים את הטכנולוגיה החדשנית.
כמו תמיד, אנו מקדמים בברכה הצעות, בקשות, וגם משוב.
מאת: מאט פלטייה, .Yaskawa America Inc
