ניווט מדויק, הכרוך לרוב ביישומים המפותחים עבור כלי-רכב קרקעיים, אוויריים וימיים, משמש לאחרונה במידה מוגברת ביישומים רפואיים החל מציוד ניתוחי ועד רובוטיקה. ובעוד דרישות התכנון של מערכת ניווט ניתוחי מציגות דמיון רחב עם ניווט כלי-רכב מקובל, קיימים גם אתגרים ברורים המוכתבים על-ידי הסביבה ורמת הביצועים הנדרשת.
ניווט מדויק, הכרוך לרוב ביישומים המפותחים עבור כלי-רכב קרקעיים, אוויריים וימיים, משמש לאחרונה במידה מוגברת ביישומים רפואיים החל מציוד ניתוחי ועד רובוטיקה. ובעוד דרישות התכנון של מערכת ניווט ניתוחי מציגות דמיון רחב עם ניווט כלי-רכב מקובל, קיימים גם אתגרים ברורים המוכתבים על-ידי הסביבה ורמת הביצועים הנדרשת.
מאמר זה מנתח את האתגרים הייחודיים של יישומי הניווט הרפואי וחוקר פתרונות אפשריים הנעים ממנגנוני חישה שונים עד עיבוד החיישנים הדרוש ועד מאפייני המערכת ועיבוד הנתונים הייחודיים הדרושים כדי לספק את הפתרונות הטובים ביותר. מפרטי חיישנים קריטיים ייסקרו ויוסברו בשל התרומה הפרטנית שלהם, וחשוב עוד יותר, מנגנוני השגיאה והסחיפה הפוטנציאליים יידונו כדי לסייע בבחירת החיישן. כמו-כן יודגשו גם ההזדמנויות והגישות לשיפור החיישנים באמצעות שילוב, מזיגת חיישנים ועיבוד חיישנים (דוגמת סינון Kalman).
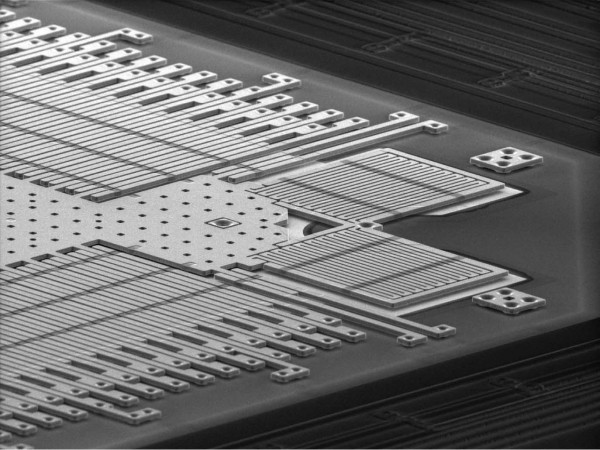
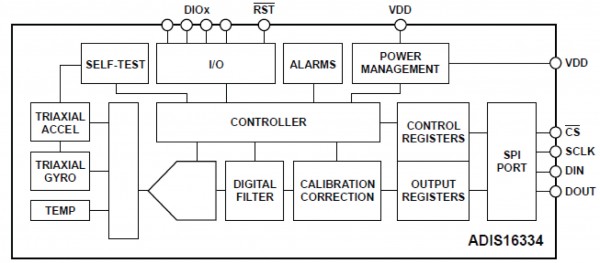
איור 1: מבני MEMS עשויים סיליקון חשים בתאוצה וסיבוב וממירים אותם לאות חשמלי באמצעות עיבוד אותות.
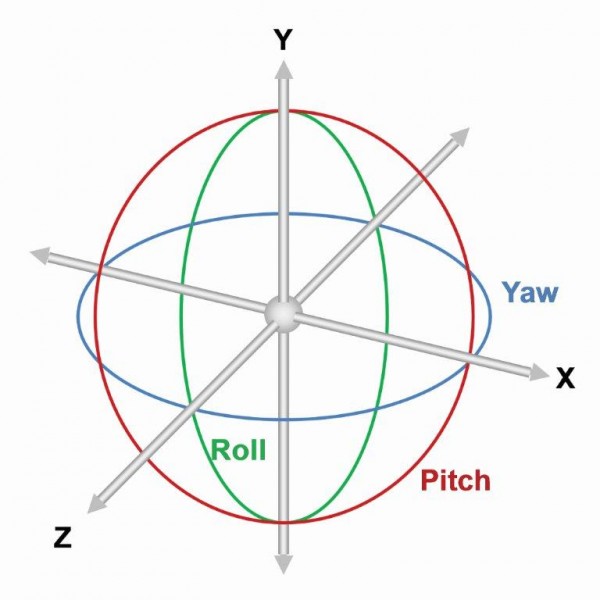
איור 2: תנועה ליניארית בצירי y ,x ו-z, בתוספת גלגול, עילרוד וסיבסוב סיבוביים משלימים את מדידת שש דרגות התנועה הדרושה לשם הגדרה מלאה של התנועה.
תרגום גילוי התנועה הליניארית והסיבובית לערכי השירות הרפואי
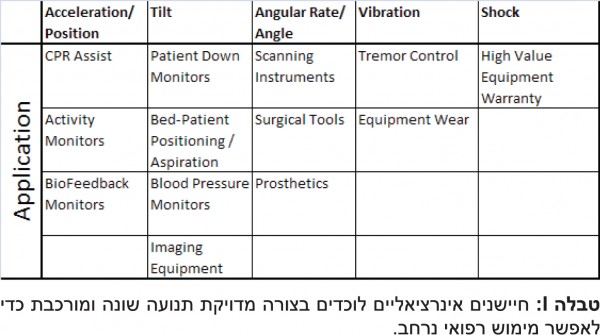
מדי-תאוצה וג’ירוסקופים מבוססי-סיליקון הידועים כמערכות מיקרו-אלקטרומכניות או MEMs (איור 1) נמצאים כיום בדרך כלל במגוון רחב של התקנים. חיישנים אינרציאליים אלה מגלים ומודדים תנועה, בעזרת הספק וממדים מזעריים, והם חשובים כמעט בכל יישום בו קשורה תנועה, ואף כאלה שהיעדר תנועה הוא קריטי. טבלה I מציינת אחדים מהיישומים הרפואיים הבסיסיים הקשורים על-פי סוג התנועה. במועד מאוחר יותר, יידונו יישומים יותר מתקדמים בהם קיימים צירופים של תנועה בתרחישים מורכבים המציבים אתגרים נוספים.
רוב התנועה היא מורכבת מטבעה
בעוד גילוי תנועה פשוטה (תנועה ליניארית לאורך ציר אחד לדוגמה) היא בעלת-ערך במספר יישומים (כגון גילוי נפילה של אדם מבוגר), רוב היישומים כוללים סוגים וצירי תנועה רבים. היכולת ללכוד תנועה מורכבת, רב-ממדית זו תעניק לא רק יתרונות חדשים, אלא גם תהווה יסוד לשמירה על הדיוק בסביבות הקריטיות ביותר.
במקרים רבים, חיוני לשלב סוגי תנועה מרובים (לדוגמה, ליניארית וסיבובית) כדי לקבוע במדויק את התנועה שהעצם ביצע. לדוגמה, מד-תאוצה יכול לשמש לקביעת זווית ההטיה מאחר שהיא רגישה לכוח הכובד של כדור הארץ. כאשר מד-תאוצה MEMS מסובב דרך שדה של ±1g , הוא מסוגל להמיר תנועה זו לתצוגה זוויתית. אולם מד-התאוצה אינו יכול להבחין בין תאוצה סטטית (כובד) לתאוצה דינמית. במקרה האחרון, ניתן לשלב את מד-התאוצה עם ג’ירוסקופ, והעיבוד המאוחר של שני ההתקנים יכול להבחין בין תאוצה ליניארית לבין הטיה, מתוך מודלים של תנועה דינמית ידועים. ברור שתהליך זה של מיזוג חיישנים הופך למורכב יותר בשעה שהדינמיקה של המערכת (מספר צירי התנועה ודרגות חופש התנועה) עולה.
חשוב גם להבין את השפעות הסביבה על דיוק החיישן. טמפרטורה היא בוודאי מקור ברור לדאגה, והיא ניתנת לתיקון; למעשה חיישנים בעלי דיוק גבוה יותר מכוילים מראש ויפצו את עצמם בצורה דינמית. גורם שפחות ברור לשקול הוא היכולת של רעידות אף קלות ליצור היסטים (shift) בדיוק של חיישני קצב סיבוביים. תופעות אלו, הידועות כתופעת התאוצה הליניארית ויישור הרעידה, עשויות להיות תלויות באופן משמעותי באיכות הג’ירוסקופ. מיזוג חיישנים אמור לשפר ביצועים אלה על-ידי שימוש במד-תאוצה כדי לגלות תאוצה ליניארית, ולעשות שימוש במידע זה, יחד עם ידע מכויל של רגישות התאוצה הליניארית של ג’ירוסקופ, לצורכי תיקון.
ביישומים רבים, במיוחד אלה הדורשים ביצועים מעבר ל”הצבעה” בסיסית (למעלה, למטה, שמאלה או ימינה) או תנועה פשוטה (בתנועה או לאו), דרוש גילוי תנועה בעל דרגות חופש מרובות. לדוגמה, חיישן אינרציאלי בעל שש דרגות חופש מוגדר כבעל יכולת לגלות תאוצה ליניארית בכל אחד מצירים אלה (x, y, z), וכן תנועה סיבובית באותם שלושה צירים, המכונה כגלגול, עילרוד וסיבסוב; כמתואר באיור 2.
איור 3. יחידות מדידה אינרציאליות מבוססות-MEMS מספקות מדידה מדויקת של שש דרגות התנועה בממדים קומפקטיים המתאימים למכשור הניתוחי.
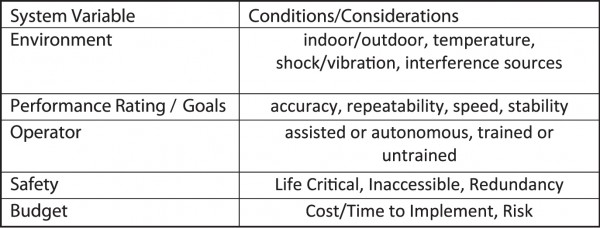
טבלה III: שיקולים בבחירת החיישן.
ניווט מכלי-רכב למכשור ניתוחי
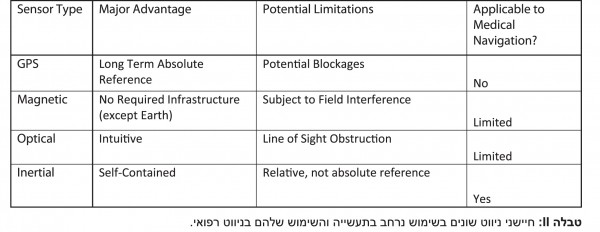
השימוש בחיישנים אינרציאליים כעזרי ניווט הפך לנפוץ בתעשייה. לרוב, הם משמשים בצירוף התקני ניווט אחרים דוגמת ה-GPS. כאשר השימוש ב-GPS איננו אמין, ניווט אינרציאלי ממלא את הפער בכיסוי מה שמכונה “ניווט לפי חישוב”. ניתן להוסיף חיישנים אחרים, כולל אופטיים ומגנטיים, בהתאם לסביבה ולמטלות הביצועים. לכל סוג של חיישן מגבלות משלו. חיישני MEMS אינרציאליים מספקים את הפוטנציאל לקיזוז מלא של אי-דיוקים אלה של החיישן מאחר שהם חופשיים מהרבה סוגי הפרעות ואינם דורשים תשתית חיצונית: לא דרושים לוויינים, שדה מגנטי או מצלמה, רק כוח התמדה. גישות הניווט העיקריות רשומות בטבלה II, ביחד עם העוצמות שלהן והמגבלות הפוטנציאליות.
באשר לפוטנציאל של חסימת GPS בניווט כלי-רכב, ההשלכות הרפואיות הם ניווט אופטי והפוטנציאל של חסימות בקו-ראיה. חיישנים מבוססי-אינרציה מבצעים ניווט לפי חישוב במהלך החסימה האופטית, כמו גם תגבור של אמינות המערכת על-ידי יצירת חישה יתירה.
ניווט רפואי
אחד היישומים הרפואיים המוזכרים בטבלה II כולל שימוש בחיישנים אינרציאליים בחדר הניתוח לשם כוונון מדויק יותר של ברך מלאכותית או מפרק ירך אל המבנה האנטומי הייחודי של המטופל. המטרה כאן היא לשפר את כוונון המפרק לפחות משגיאה של 10 מהכוונון הטבעי של המנותח לעומת שגיאה של 30 או יותר כיום עם גישות הכוונון המכניות הפשוטות. מעל 95 אחוזים מניתוחי ה- המבוצעים כיום נעשים בעזרת כוונון מכני. גישות בעזרת מחשב המשתמשות בכוונון אופטי החלו רק להחליף באיטיות חלק מההליכים המכניים, כנראה בשל תוספת הציוד הדרושה. אם משתמשים בכוונון מכני או אופטי, קרוב ל-30% מהליכים אלה מסתיימות בחוסר כוונון (המוגדר כשגיאה מעל 30), דבר הגורם הן לאי-נוחות והן לעתים לניתוח נוסף. עם הקטנת חוסר הכוונון נוצר פוטנציאל להציע זמן ניתוח פחות פולשני ויותר קצר, דבר המעלה את נוחות המטופל לאחר הניתוח ויוצר החלפות מפרקים המאריכות יותר זמן. הוכח שחיישנים ראשוניים בצורת יחידת מדידה רב-צירית מלאה (inertial measurement unit – IMU) כמתואר באיור 3, מספקים שיפור ניכר בדיוק עבור ה-TKA.
בחירת החיישן והעיבוד ברמת המערכת
קיים מבחר רחב ברמות הביצועים של חיישנים אינרציאליים. התקנים המתאימים למשחקים אינם מסוגלים לענות לבעיית הניווט בעל ביצועים גבוהים כמתואר כאן. מפרטי ה-MEMS העיקריים הם סחיפת הממתח, השפעת הרעידות, רגישות ורעש. ניווט תעשייתי ורפואי מדויק מחייב לרוב רמות ביצועים גבוהות יותר בסדר גודל מאשר ניתן להשיג מחיישני MEMS הנועדים לשמש בהתקני צריכה. טבלה III מתארת את שיקולי המערכת הכלליים, המסוגלים בעזרת ניתוח מעמיק להכתיב את בחירת החיישן.
מרבית המערכות יממשו גרסה כלשהי של מסנן Kalman כדי לאחד ביעילות סוגי חיישנים רבים. מסנן ה-Kalman מביא בחשבון את מודל הדינמיקה של המערכת, הדיוקים היחסיים של החיישן ונתוני בקרה מיוחדים ליישום כדי לבצע את הקביעה הטובה ביותר של התנועה המעשית. חיישנים אינרציאליים בעלי דיוק גבוה יותר (רעש נמוך, סחיפה נמוכה ויציבות בשינויי הטמפרטורה/הזמן/ההספק) מקטינים את המורכבות של מסנן ה-Kalman, מספר החיישנים היתירים הדרושים ומספר המוגבלויות המוכתבות על תרחישי מערכת תפעוליים אפשריים.
אימוץ MEMS ביישומים רפואיים
לכידת תנועה ביישומים הרפואיים המורכבים ביותר מעמידה בבעיות מאתגרות ביותר הכרוכות במחשוב מתקדם. למרבה המזל, רוב העקרונות האלה הדרושים לפיתרון בעיות רפואיות מהדור-הבא מבוססים על גישות מוכחות מתוך בעיות ניווט תעשייתי קלאסי, הכולל מזיגת חיישנים וטכניקות עיבוד. במסגרת הניווט הרפואי, מורכבות התנועה ודרישות הדיוק והאמינות יכתיבו את הצורך ב:
חיישנים מרובים
עיבוד חיישנים מאוחר (post processing) נוסף
אלגוריתמים מתוחכמים
סכמות בדיקה/פיצוי מורכבות
הנגישות של פיתוחי חיישנים מדויקים ביותר ואיתנים סביבתית מביאה לצמיחה חדשה באימוץ חיישני MEMS אינרציאליים במסגרת התחום הרפואי.
התקני MEMS אינרציאליים אלה מסוגלים להציע יתרונות בדיוק, ממדים, הספק, יתירות ונגישות לעומת גישות מדידה/חישה קיימים.
.