








 John Bottril,
John Bottril,
Texas Instruments
חוגי בקרה של ממירי מתח נחשבים למורכבים, והם נסמכים על העובדה שפעולת הממיר מתבצעת בתוך חלון של תנאים מוגדרים. עם זאת, כאשר ממירים פועלים מחוץ לתנאים מוגדרים אלו, הם עלולים להציג התנהגות בלתי צפויה. מאמר זה חוקר את אחת הבעיות הנפוצות ביותר שבהם מהנדס תכנון יכול להיתקל – הבעיה שבה נוצר מצב שממיר מוריד
(forward – buck) פועל מחוץ לחלון הפעולה המוגדר הרגיל של הולכה רציפה, ועובר לתנאים של הולכה בלתי רציפה בעומס נמוך.
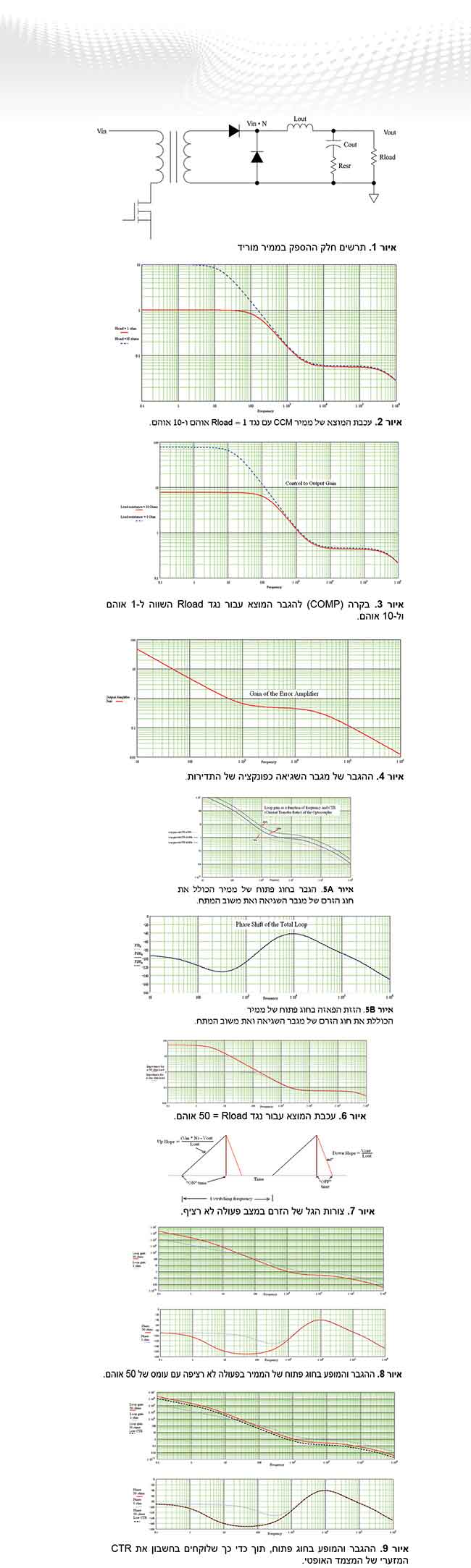
חוג הבקרה, של רוב הטופולוגיות של ממיר מוריד, ידוע היטב ופיתוחו נעשה סביב מודל של ממיר. חלק המתח של ממיר זה מופיע באיור 1.
מודל זה מתוכנן בהתבסס על הנחה שקיים זרם עומס מספיק, כך שהזרם העובר דרך המשרן יהיה רציף. אם אכן זה המקרה, ערך המתח במוצא יהיה באופן פשוט ערך המתח בכניסה, (אם נתעלם מהפסדים וממפלי מתח על מוליכים למחצה), כשהוא מפורק לגורמים על מנת לכסות את יחס הכריכות, כפול מחזור העבודה. הן מודל בקרת המתח והן מודל מבוקר הזרם, ידועים היטב.
אם יחס הכריכות הראשוני למשני הוא 1:N, המתח בצומת של הדיודות, כאשר המתג נמצא במצב פועל, יהיה VIN כפול N, אם נתעלם ממפלי מתח על הדיודות ועל טרנזיסטור FET.
כעת נניח שהעכבה (impedance) של העומס גדלה לנקודה שבה הזרם העובר דרך המשרן במוצא כבר אינו רציף. במצב זה, ההנחה הבסיסית הזו לא תהיה עוד תקפה ותיאוריית הבקרה הקשורה למודל הרציף, כבר לא תהיה מדויקת.
במקרה של פעולה בלתי רציפה, הזרם העובר למוצא אינו רציף. קיים זמן שבו המשרן במוצא – המופיע באיור 1 – אינו מחובר לכריכות השנאי ולא להארקה דרך הדיודות. כאשר המתג בצד הראשוני נמצא במצב פועל, הזרם העובר דרך המשרן במוצא גדל באופן ליניארי כפונקציה של המתח על פני המשרן. לאחר מכן, כאשר המתג יעבור למצב כבוי, הזרם העובר דרך המשרן ינסה להמשיך לזרום, ויגרום בכך לנפילה של המתח ולמעבר זרם דרך הדיודה המחוברת להארקה. כתוצאה מהיפוך המתח על פני המשרן, הזרם העובר דרך המשרן יתחיל לקטון. בפעולה בלתי רציפה הזרם יירד עד לאפס.
הזרם הממוצע במשרן שביציאה חייב להיות שווה לזרם של העומס.
אפשר לכתוב סדרה של משוואות על מנת להגדיר את ביצועי המעגל במקרה של מצב זרם רציף. במצב כזה, בכניסה אל LOUT (צומת של הדיודות עם LOUT), כאשר טרנזיסטור FET במצב פועל (ON), המתח בצומת יהיה VINxN, ו-D יהיה מחזור העבודה שאליו אנו מגיעים עם
VINxNxD = VOUT.
זרם השיא העובר דרך המשרן הוא
ו-Fsw הוא תדירות המיתוג.
האינטגרל של הזרם העובר דרך המשרן חייב להיות שווה לזרם העומס הכולל של המחזור, כדי למנוע שינוי נטו במתח המוצא.
בממיר מוריד במצב זרם רציף, התוצאה של שינוי קל בזרם, תהיה אותו שינוי זרם כפול זמן המחזור הכולל, על מנת להשוות את השינוי במטען המועבר. עם זאת, במקרה של פעולה בלתי רציפה, לשינוי בזרם יש פחות השפעה מפני שהוא מוליך למשך אחוז קטן מהזמן בלבד.
עובדה זו גורמת לשינוי בהגבר של המעגל וגורמת לשינויים בדינמיקה. על מנת להציג זאת, השתמשנו במודל מתמטי, כדי להדגים את ההשפעה שיש לבקרה על המוצא של ממיר מצב פעולה בזרם.
מבין הרכיבים התיאורטיים שנבחרו, העכבה של מוצא הממיר מופיעה בתרשים באיור 2 עבור שני מצבים: 1 אוהם ו-10 אוהם – שניהם גורמים להולכה רציפה.
עם יחס הכריכות של השנאי והמעגל המשולב (IC) המשמש לבקרה שנבחרו, אנו יכולים לתכנן את חוג הבקרה בהתבסס על רכיבים אלו. הבקרה התיאורטית להגבר חוג המוצא בשני מצבי העומס האלו מופיעה באיור 3.
מתוך מידע זה יש לתכנן את חוג המשוב מהמוצא אל הבקרה, כך שבתדירות החצייה (crossover frequency) הרצויה, ההגבר יהיה שווה אחד. השיפוע של ההגבר בנקודה זו של עקומת ההגבר הוא בתלילות (roll off), שהיא בערך 20dB לדקה בתדירות. אם היינו בוחרים בתדירות חציה של 5 קילו הרץ, הגבר הבקרה למוצא היה 0.5 בערך, ולכן יש לתכנן את חוג המשוב כך שיהיה לו הגבר כולל של 2 בערך ב-5 קילו הרץ.
הדבר הראשון הוא לקבוע את רכיבי המשוב מחיבור פין COMP בכיוון לאחור אל החיישן/ מגבר, תוך התחשבות בטווח המתחים הנדרש בפין COMP.
בלי להיכנס לפרטים, ההגבר הנדרש בחלק זה הוא הגבר קבוע של ארבע. המשמעות היא שבתדירות של 5 קילו הרץ המעגל של חיישן מגבר השגיאה חייב להיות עם הגבר של 0.5. דרישות נוספות הן שההגבר אמור להיות שטוח או קרוב לשטוח עבור התחום שלפני תדירות החציה הממשית (1 קילו הרץ) והן לאחריה (25 קילו הרץ). צורת ההגבר היא הדבר הראשון שיש לקחת בחשבון ואפשר לעשות זאת בקלות סביב מגבר השגיאה. כל זאת, אפשר לראות מוצג באיור 4. מאחר שב-5 קילו הרץ ההגבר של מגבר השגיאה הוא 0.5, המצמד האופטי ומעגלים אחרים חייבים להכפיל את ההגבר פי ארבעה. אנו עושים זאת על ידי כך שיש לנו הגבר של שניים דרך המצמד האופטי, ושניים במגבר השגיאה הפנימי שבבקר של אפנון רוחב האות (PWM).
המצמד האופטי מבוסס על התקני זרם אשר לעתים קרובות יש להם סטיות של יחס העברת זרם (CTR) של בין 50% לבין 200%, עם ערך נומינלי של 100%.
האיורים 5A ו-5B מראים את ההגבר והמופע (phase) הכוללים של החוג כפונקציה של התדירות, לרבות האפיצות (טולראנס) עבור הסטיות ב-CTR של המצמד האופטי.
איורים 5A ו-5B מציגים ממיר יציב שאמור להביא לפעולה חזויה. עם זאת, תוצאה זו מבוססת על מודל עם זרם רציף דרך משרן המוצא.
כאשר העומס עולה עד לנקודה שבה הזרם הופך להיות בלתי רציף עבור יחידת הבקרה במצב זרם, עכבת התדירות הגבוהה של הממיר נשארת דומה. עם זאת, העכבה בתדר נמוך גדלה. אפשר לראות זאת באיור 6, עבור המקרה שבו התנגדות העומס במוצא במתח ישר גדלה עד ל-50 אוהם. על כן, הממיר מספק זרם רציף של 0.2 אמפר.מעבר לכך, עבור כל מחזור של הממיר, הפועל בתדירות מיתוג של 100 קילו הרץ, המטען הכולל Q הנדרש על ידי העומס הוא 2 מיקרו קולון. מטען זה מועבר למוצא בזרם עם צורת אות של משולש עם שיפוע עולה (upslope) שניתן לקבוע אותו בהתבסס על יחס הכריכות של מתח הכניסה ועל מתח המוצא, ועם שיפוע יורד (downslope) שניתן לקבוע אותו בהתבסס על מתח המוצא (עיין באיור 7). באופן כזה, קיים יחס בין השיפוע העולה והשיפוע היורד, מאחר שהשיא משותף לשניהם והוא פונקציה של הזמן במצב ON.
היחס בין הזמן במצב OFF () לזמן במצב (Ton) מוגדר באמצעות הנוסחה (תוך התעלמות ממפלי המתח על פני הדיודות וטרנזיסטור FET):
אפשר כעת לחשב את המטען Q בכל מחזור באמצעות הנוסחה:
כאשר השיפוע העולה (upslope) הוא:
EQ (3)
כאשר N = 1/Npri והשיפוע היורד (downslope) הוא:
EQ (4)
מהמשוואות האלה בלבד ומיחס הכריכות של השנאי, אפשר לקבוע את הזמן במצב ON ואת זרם השיא בסליל הראשוני.
על ידי סידור מחדש וחיסור אפשר לפתור את Ton:
= 1.476 us EQ (5)
מהמשוואות המופיעות לעיל, אנו יכולים עכשיו לחשב את זרם השיא בצד של הסליל המשני:
(6) EQ
זרם שיא זה מתורגם בצד הראשוני דרך שנאי ההספק ושנאי חישת הזרם אל נגד חישת הזרם. הוא מייצג מתח של 1.435 וולט ביציאה COMP (בהנחה ש- UCC2813-2 הוא הבקר), אשר כולל מתחי היסט והגבר של מעגל פנימי. השלב הבא הכרחי כדי לסלק את כל מתחי ההיסט, על מנת לזהות את התרומה של הזרם בתוך המתח הזה. תרומת הזרם הכוללת למתח COMP היא 0.085 וולט.
כך נוצר הגבר מתח ישר של ההגבר מהבקרה אל המוצא של 10/0.085 (VOUT לחלק למתח החישה בסליל הראשוני – I) או 117.255. את עכבת המוצא אפשר לקבל מאיור 6.
כעת, אפשר לחשב את ההגבר והמופע המלאים בחוג פתוח, והם מוצגים באיור 8. האיור כולל את ההגבר של מגבר השגיאה ואת כל הפרמטרים האחרים של המעגל.
אפשר למצוא כמה דברים מעניינים ביותר, שיש צורך לקחת אותם בחשבון בניתוח זה. לא רק שהגבר החוג משתנה, גם המופע מוזז.
בתכנון כזה של ממיר, תדירות החצייה בחוג בהגבר של 0dB (כאשר ההגבר עובר דרך 1) ירדה מ-5 קילו הרץ עם שולי מופע של 120 מעלות בערך, לתדירות של 1 קילו הרץ ושולי מופע של 60 מעלות בחצייה ההגבר ב-0dB.
בתכנון זה, הממיר יציב בשני התנאים, אבל השינוי הוא משמעותי.
נבחן כעת את המקרה שבו CTR של המצמד האופטי הוא נמוך. עיין באיור 9.
חציית החוג ב-0dB ירדה כעת ל-600 הרץ בערך, ושולי המופע ב-600 הרץ הם 45 מעלות. מצב זה עודו יציב. הבעיה היא שבתכנון זה מתייחסים רק לפרמטר משתנה אחד של הממיר, שהיה יציב מאוד בתנאי פעולה רציפים רגילים, וכעת, דחף את התכנון אל הגבול. אם התכנון לא היה כל כך שמרני, קל לראות שבתכנון זה יכולים היו להיות בעיות במצב פעולה לא רציף.
מסקנות
במאמר זה הראינו איך ממירים שהם יציבים בתנאי פעולה רציפים, עלולים להיתקל בבעיות של חוסר יציבות כאשר העומס גורם לפעולה לא רציפה של זרם המשרן. מתכננים שיוצרים ממירים עבור פעולה בתנאי עומס מזעריים, צריכים לבדוק את היציבות של היחידה בתנאי עומס מזעריים למקרה שיופיעו בעיות בלתי צפויות של יציבות, עם זרם בלתי רציף, דרך המשרן ביציאה. ראוי לזכור לבנות את התכנון עם שולי ביטחון, כדי לטפל בתנאים אלו.
 אודות המחבר
אודות המחבר
ג'והן בוטריל (John Bottril) הוא מהנדס יישומים בכיר בטקסס אינסטרומנטס ארה"ב. ג'והן מספק תמיכה ללקוחות ומבצע הערכות של מעגלים משולבים חדשים לפני הוצאתם לשוק. בפעילותו זו, הוא הפיק יותר מ-20 מאמרים טכניים ולזכותו רשומים שני פטנטים. ג'והן בעל תואר BSc בהנדסת חשמל מאוניברסיטת Queen's בקינגסטון, אונטריו, שבקנדה.
