מאת: אבי דולב, אמירוניק בע"מ. הגודל והמשקל של מערכות הניווט האינרציאלי כמו גם סנסורי האינרציה הג'ירו (Gyro) ומד התאוצה (Accelerometer) הגבילו מאד את השימוש בהם. עם פריצת הדרך בטכנולוגיית ה- (Micro Engineered Mechanical Structures), ניתן היה להשתמש בסנסורים הפועלים על עקרון קוריוליס (ע"י מבנה רוטט אנכי למשטח מתפתח כח קוריוליס המהווה מדד ישיר למהירות הסיבוב).
מאת: אבי דולב, אמירוניק בע"מ. הגודל והמשקל של מערכות הניווט האינרציאלי כמו גם סנסורי האינרציה הג'ירו (Gyro) ומד התאוצה (Accelerometer) הגבילו מאד את השימוש בהם. עם פריצת הדרך בטכנולוגיית ה- (Micro Engineered Mechanical Structures), ניתן היה להשתמש בסנסורים הפועלים על עקרון קוריוליס (ע"י מבנה רוטט אנכי למשטח מתפתח כח קוריוליס המהווה מדד ישיר למהירות הסיבוב).
המעבר לטכנולוגיית ה-MEMS התגבר על מגבלת הנפח והעלה את נושא הניווט העצמי לכותרות, אולם עדיין לא היה בשל לרמת דיוק גבוהה עקב שגיאות המדידים הקיימים בסנסורים מסוג זה. חשוב לציין שכבר עכשיו טכנוגיית ה-MEMS נותנת פתרונות Cost Effective לתעשייות השונות.
חברת Gladiator Technologies האמריקאית הוקמת בשנת 2005 בידי מיטב המהנדסים של יצרניות סנסורי החישה העצמית (Inertial Navigation) המוכרות על מנת להבשיל את רמת הניווט העצמי בטכנולוגיית ה-MEMS לרמה טקטית, וכיום, בשנת 2013, היא החברה המייצרת את סנסורי ה-MEMS ומערכות הניווט האינרציאלי עם הביצועים הכי טובים והיתרון שלה מול שאר יצרניות ה-MEMS הנו ברעש הנמוך והיציבות הטובה.
החברה כבר הספיקה לרשום לעצמה למעלה מ-69 פטנטים בתחום ה-MEMS והחישה האינרציאלית והיא כבר יישרה קו אל מול הביצועים של הטכנולוגייה האופטית הנפוצה (FOG ,RLG).
עקב עלויות הייצור הנמוכות המוצרים שלה משמעותית הרבה יותר זולים.
היישומים הנפוצים ביותר כיום ברכיבי ה-MEMS של חברת Gladiator Technologies הנם בסטביליזצית פלטפורמות ואנטנות, סטביליזצית רכיבי IR או רכיבים אלקרו-אופטיים (EO) וייצוב תמונה (Image Stabilization). כמו כן, הם נפוצים מאד במערכות בקרת טיסה ובתחום ניסויי הטיסה ויתרה מכך לצורכי הנחייה, ניווט ושליטה כמו בתחומי הטלמטריה, המכשור ושמירת Line Of Sight) LOS) .
הניווט האינרציאלי הוא בעצם עקרון ניווט בו המדידות מסופקות ע"י ג'ירוסקופים ומדי תאוצה. למשל, למדידת 6 דרגות חופש (6DOF) נדרשים 3 גי'רויים ו-3 אקסלרומטרים.
נזכיר ונסקור תחילה בקצרה את אבני הבניין של סנסורי הניווט האינרציאלי:
Gyros & Accelerometers – מהווים את הבסיס של הניווט האינרציאלי והסטביליזציה. הג'ירו מספק את המהירות הזוויתית סביב ציר מסוים (מעלות לשנייה) ומד התאוצה מספק את התאוצה על ציר מסוים ע"י מדידת כח.
(Inertial Measurement Unit) – ה-IMU הנו סנסור המספק מהירות זוויתית בצירי העלרוד (Pitch), הגלגול (Roll) והסבסוב (Yaw). כמו כן, הוא מספק את התאוצה בשלושת הצירים (X , Y , Z) ואת הטמפרטורה.
ה-IMU הנו רכיב דיגיטלי, אולם קיימת לו גרסה אנלוגית המכונה MRM (Motion Reference Module).
(Vertical Gyro (VG – הג'ירו האנכי מוסיף ל-IMU גם את ערכי זוויות הגלגול, העלרוד והסבסוב והמהירויות בצירים
ה-X ,Y ,Z.
Attitude & Heading Reference System) AHRS) – רכיב המכיל גם ברומטר למדידת גובה מעל פני הים עפ"י לחץ האוויר ומגנטומטר למדידת שדות מגנטיים לחישוב כיוון ההתקדמות יחסית לצפון (Heading). ה-AHRS מספק את אותם הנתונים של ה-Vertical Gyro ומוסיף גם את ערך השדה המגנטי בשלושת הצירים, לחץ האוויר, הגובה (Altitude) ומהירות ההתקדמות.
קיימת אפשרות לחבר עם מקלט GPS פנימי בתוך הרכיב לטובת כיול ודיוק מדידות והפקת נ"צ (Latitude , Longitude). רכיב זה נקרא GPS/AHRS.
INS\GPS – ה- (Inertial Navigation System) הנו פתרון הניווט המורכב ביותר. הוא דוגם אות GPS לנרמול המדידה ומכיל מסנן קלמן לשערוך השגיאה ונעזר גם בברומטר ומגנטומטר. תוצרי רכיב ה-INS\GPS הם ערכי המהירות הזוויתית וערך הזווית (Pitch ,Roll ,Yaw), מהירות יחסית (North ,East ,Up), טמפרטורה, גובה (Altitude), מהירות האוויר (Airspeed), נ"צ (Latitude , Longitude), זמן ו-Heading יחסית לצפון.
ההבדל המהותי ביותר בין ה-INS ל-AHRS הנו שבעת אובדן תקשורת לווינית (כמו במקרים של כניסה למנהרה או בסביבה תת מימית), ה-AHRS יסתמך על המגנטומטר בלבד לשערוך הנ"צ, בעוד ה-INS יצליח לשערך נ"צ טוב יותר הודות לפונקציות עיבוד המדידה הפנימיות שבו.
לצורכי סטביליזציה (למשל: קיבוע מטע"ד על נקודת הסתכלות) מקובל לבחור ב-AHRS, כל עוד לא נדרש לחשב את זווית הסרטן (Crab Angle), הזווית בין וקטור המהירות לאף הפלפורמה (כמו במקרים של פיצוי על משיכת הרוח).
ההתפתחות המהירה של חברת Gladiator Technologies מאפשרת לה לכנות את המוצרים שעד לפני כמה שנים היו בקדמת הטכנולוגייה כ-Low Cost ולהכריז על מוצרים חדשים בחזית טכנולוגיית הניווט והיציבות.
מוצרי החברה מכילים בתוכם מגנטומטר, ברומטר ומקלט GPS כך שלא נדרש לדגום ממערכות חיצוניות וכל הסנסורים פנימיים באינטגרציה מלאה.
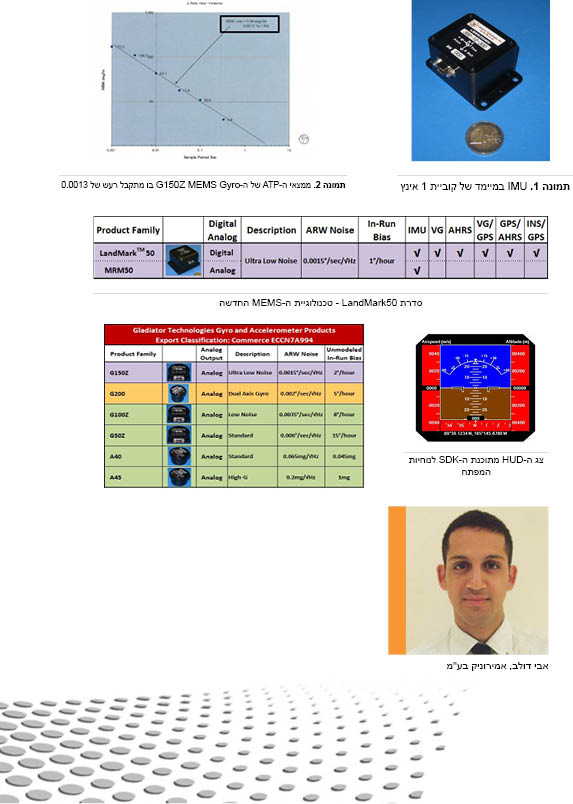
עד שנת 2013, הוטמאה קטגוריית ה-Very Low Noise בסדרת רכיבי ה-LandMark40. וכעת, החברה התחילה לשווק את טכנולוגיית ה-MEMS הטובה והאיכותית ביותר בשוק המכונה Ultra Low Noise בסדרת הרכיבים LandMark50.
היכולת להעריך איכות הסנסור נקבעת עפ"י הפרמרטים הבאים:
ARW Noise – שגיאת ההילוך האקראי (Angular Random Walk) נמדדת ביחידות של והיא מהווה את צפיפות
הרעש הנמדד שמקורו במיצוע מדידות לאורך זמן. ערך זה מכמת את השגיאה במדידת הזווית.
In-Run Bias – ההיסט הנו פרמטר הנמדד ביחידות של והוא נותן חווי על יציבות הסטייה של הסנסור לאורך זמן.
החברה מיקדה עצמה במזעור פרמטרי שגיאת המדידים שצוינו, ולאחר הצלחת המחקר והפיתוח הכריזה על המוצרים הבאים:
G150Z) New MEMS Gyro) – ג'ירו אנלוגי עם קצב עדכון (Bandwidth) של 200Hz ובעל רעש מזערי של עד ![]() ובהיסט של עד
ובהיסט של עד ![]() . ה-G150Z מחליף את ה-G100Z שהיה בעל רעש של
. ה-G150Z מחליף את ה-G100Z שהיה בעל רעש של ![]() והיסט של
והיסט של ![]() (מעבר מ-Low Noise ל-Ultra Low Noise).
(מעבר מ-Low Noise ל-Ultra Low Noise).
ה-G150Z חש מהירות זוויתית בטווח של sec /![]() או sec /
או sec / ![]() (בהתאם לבקשת הלקוח) ושוקל פחות מ-28 גרם. צריכת המתח הנה נמוכה (+5V) והסנסור מזווד לחלוטין (מכוייל טמפרטורה, עמיד בהלמים ורעידות, בעל קונקטור צבאי). עמידה בביצועים תהייה בטווח טמפרטורה שבין -400C עד +850C.
(בהתאם לבקשת הלקוח) ושוקל פחות מ-28 גרם. צריכת המתח הנה נמוכה (+5V) והסנסור מזווד לחלוטין (מכוייל טמפרטורה, עמיד בהלמים ורעידות, בעל קונקטור צבאי). עמידה בביצועים תהייה בטווח טמפרטורה שבין -400C עד +850C.
הביצועים של גי'רו זה מתחרים ב-RLG וב-FOG בחוג פתוח.
• Dual Axis Gyro) G200) – גי'רו דו-צירי בעל רעש של עד ![]() והיסט של עד
והיסט של עד ![]() . הייתרון בסנסור מסוג זה שהוא בעצם משמש כשני גי'רויים, בלתי תלויים אחד בשני, ברכיב אחד. כל אחד מודד מהירות זוויתית על ציר אחר. הג'ירו הדו-צירי נותן פתרון למי שמשתמש בטכניקת הסטביליזציה הנשענת על 2 גי'רויים בלבד.
. הייתרון בסנסור מסוג זה שהוא בעצם משמש כשני גי'רויים, בלתי תלויים אחד בשני, ברכיב אחד. כל אחד מודד מהירות זוויתית על ציר אחר. הג'ירו הדו-צירי נותן פתרון למי שמשתמש בטכניקת הסטביליזציה הנשענת על 2 גי'רויים בלבד.
A40 Accelerometer – מד התאוצה סוג MEMS המודד עד 15g±. הרעש שלו הוא עד ![]() וההיסט עד 0.045mg מה שמאפשר לו להשתלב גם ביישומי התעופה המסחרית והתובלה. רוחב הסרט יכול להיות 450Hz, והרכיב עמיד בהלמים, רעידות והפרעות תאלמ"ג Electromagnetic Interference) EMI). כמו כן, צריכת ההספק הנה דלה (צורך פחות מ-20mA) והוא שוקל פחות מ-15 גרם.
וההיסט עד 0.045mg מה שמאפשר לו להשתלב גם ביישומי התעופה המסחרית והתובלה. רוחב הסרט יכול להיות 450Hz, והרכיב עמיד בהלמים, רעידות והפרעות תאלמ"ג Electromagnetic Interference) EMI). כמו כן, צריכת ההספק הנה דלה (צורך פחות מ-20mA) והוא שוקל פחות מ-15 גרם.
הודות לנתונים הגבוהים של מד התאוצה A40, החלו תעשיות בעולם לשלב אותו בניטור ססמי, בבדיקות התרסקות רכב, במערכות לניטור פלטפורמות או ניטור ימי ואף ליישומי מעבדה בהם נדרש דיוק מרבי ללא שגיאות.
משפחת ה-LandMark50 החדשה מציעה:
IMU
MRM – Analog IMU
VG – Vertical Gyro
AHRS
VG/AHRS
GPS/AHRS
INS/GPS
לסנסורים אלו יש רעש של עד ![]() והיסט עוד יותר ממוזער של עד
והיסט עוד יותר ממוזער של עד ![]() !
!
מוצרי ה-LandMark50 אינם מצריכים ביצוע כיול ראשוני או תפעול Setup כלשהו היות והחברה מספקת את מוצריה מזוודים וקשיחים כך שלכל מוצר בוצע פיצוי מלא של ההיסט, של תאוצת הכובד g, של ה-Heading ושל ה-Altitude. כמו כן, קיים פיצוי מלא לשגיאה הנובעת מהיחס שבין מוצא הרכיב לבין המצב בפועל (Scale Factor) ומהשגיאה של ההשפעה ההדדית של כל הצירים אחד על השני (Misalignment).
כמו כן, קיימת עמידות בפני טווח טמפרטורה שבין -550C ל – +1000C וכן בפני הלמים ורעידות קיצוניות. המבנה הקשיח מאפשר עמידות בפני הפרעות EMI וכולל חיבור קונקטור MILSPEC (ניתן להאריך את החיווט ע"י חיבור "Pig Tail" ללא פגיעה בעמידות).
קצב הדגימה הפנימי של כל אחד מהסנסורים הנו 4000Hz, המהווה נתון מדהים וסוג התקשורת במוצא הרכיב הנו RS485 במקצבים של 100Hz כסטנדרט, אולם ניתן לאפיין בקצב של 500Hz עפ"י דרישה.
אות ה-GPS רודד לקוד אזרחי בקצב דגימה של 5Hz בכדי שלא יידרש רשיון ייצוא, נושא זה מהווה יתרון גדול לתעשייה בישראל עבור מוצרים המיוצרים בארה"ב.
SDK
ה-SDK ,Software Development Kit, הנו כלי עבור המהנדס המשתמש ברכיב ובא לעזור לו ביישום והבנת הסנסור והקלת ההתקנה. כמו כן, הקיט מאפשר למהנדס המערכת לבצע אבחנה של בעיות העשויות לנבוע מהתוכנה שלו, מקריאת הודעות בצורה לא נכונה או פשוט מחיבור לא נכון.
את ה-SDK נדרש להזמין פעם אחת בלבד עבור המוצר והוא בא עם ממיר RS485 לממשק USB לטובת תפעול נח וממשק למחשב PC. בתוכנת ה-SDK קיימת תצוגת (Head Up Display) ויכולת הקלטת נתונים גולמיים כ-Raw Data. רוחב הסרט וקצב נתוני הפלט ניתנים לשליטה ע"י המתכנת וקיים לחיץ Self-Test לבדיקת המכשיר.
לסיכום
חברת Gladiator Technologies הנה מהמובילות בתחום הניווט האינרציאלי והסטביליזציה בטכנולוגיית ה-MEMS. משפחת מוצרי LandMark50 הציבו רף חדש לביצועי סנסורי ה-MEMS,ומערכות מבוססות MEMS הדוגמות GPS. מוצרי החברה נפוצים מאד בתחומי התעופה והחלל ,בתעשיות הבטחוניות (לרבות הכלים הבלתי מאויישים UAV ,UGC, USV, UUV) ובתחום ההגנה האווירית, כמו גם תחום הרכבים, התובלה, הים האנרגיה ובתעשייה המסחרית.
השילוב שבין מחיר זול, מזעור הגודל, ההספק נמוך והדיוק הרב מאפשר למוצרים להיות מתאימים ביותר ליישומי הבקרה והסטביליזציה ומעמיד את החברה בקדמת טכנולוגיית ה-MEMS.