hMTechnology)") ישראל כהן, אבירי טכנולוגיות
ישראל כהן, אבירי טכנולוגיות
מערכות ויישומי בקרת התנועה של היום דורשים פתרונות מדויקים יותר מהירים יותר וזולים יותר. הדרישה לפרופילי תנועה מורכבים יותר מובילה לשינוי קונספט העבודה עם מערכות מבקרות פנאומטיות והידראוליות למערכות מבוקרות ע"י מנועים חשמליים. ולמרות זאת, גם המנועים החשמליים הפשוטים המשמשים היום, כבר לא יכולים לספק בקרה מתאימה.
הגדלת אורך החיים של המכונה והוזלת עלויות התחזוקה מכוונים אותנו לשימוש בפתרון האולטימטיבי בדמות מנועים וחוגי בקרה חכמים.
דרישות אלו הופכות את טכנולוגיית מנוע ה-Brushless לברירה ההגיונית בבחירת מנועים. קיימות שתי טכנולוגיות נפוצות של מנועי Brushless שזמינות היום בשוק: מנועי צעד ומנועי Servo. שתי הטכנולוגיות מספקות את הדיוק והבקרה הנדרשים לתנועה מדויקת. עם זאת, יש ביניהן כמה הבדלים.
מנועי Servo יכולים להיות הברירה הטובה יותר ביישומים עם דרישות הספק שעולות על ¾ כוח-סוס. הם גם יכולים להיות מתאימים יותר אם מהירויות המנוע אמורות לעלות על 3000 סל"ד, בתלות במומנט הנדרש. עם מנועי Servo אפשר לקבל הספק שיא גבוה במהירויות גבוהות.
ואולם, מנועי צעד יכולים לספק יתרונות ממשיים ליישומים רבים עם פחות מכוח-סוס אחד.
העלות של מנועי צעד, כתוצאה מהדרך שבה הם בנויים, נמוכה מזו של מנועי Servo. למנועי צעד אין צורך בכיול, הם מאפשרים יחס אינרציות גדול יותר והם בעלי מומנט גבוה מאוד. מומנט זה זמין במלואו (100%) מיד עם ההתנעה, תכונה בעלת יתרון רב מאוד כאשר נעשים צעדים קצרים ומהירים או כאשר משולבים עומסים בעלי אינרציה גבוהה. מאחר שמנועי צעד הם מנועים סינכרוניים עם מספר קטבים גבוה, הם יכולים לפעול באופן חלק במהירויות איטיות במיוחד, ללא אי רציפות (cogging).
בטכנולוגיית מנועי הצעד הקיימת היום יש כמה חסרונות. החיסרון הקריטי ביותר הוא איבוד הסנכרון והמומנט (החלקה), כמו כן המנוע לא יכול להסתנכרן מחדש, כאשר העומס מופחת לרמה שנמצאת בתחום היכולת של המנוע. למנועי צעד יש גם נטייה להתחמם בגלל השימוש בזרם פאזה מלא, בלי קשר לעומס. ביישומים מסוימים, אם העומס צריך להתגבר על המנוע, לא יתאפשר לחוש את הקטבים של מנוע צעד בזמן שהרוטור נמשך על ידי העומס.
חסרונות אלו עלולים היו להשפיע על ההחלטה לבחור במנועי Servo שעלותם גבוהה יותר במקום במנועי צעד. כעת כשאנו מכירים את hMTechnology () – השימוש במנועי צעד הפך להיות מעשי יותר, וברוב המקרים, הם הברירה המועדפת עבור יישומים שנדרשים להם מנועי Brushless.
טכנולוגיית hMTechnology מבית שניידר אלקטריק יצרה מהפכה בתחום בקרת החוג הסגור, אשר אם מיישמים אותה על מנועי צעד, היא מונעת את תופעת איבוד הסנכרון שנגרם בגלל עומס יתר, כתופעת מעבר או כתופעה רציפה, בגלל האצה או האטה קיצוניות או בגלל מהירות סיבוב (slew) מוגזמת.
עיקרון הפעולה
טכנולוגיית ה-hMTechnology (ראה איור 1) מכניסה טווח של משתנים אל תוך המשוואה של בקרת מנועי Brush-Less, אשר מבטלים את איבוד הסנכרון ומאפשרים להשתמש במנועי צעד ביישומים שנמצאים מחוץ לטווח המסורתי, בגלל מגבלותיהם.
השימוש במגבלות משתנות של הקדמה/פיגור מבטיח שהבקרה הפונקציונלית של המנוע לא תאבד לעולם. בקרת זרם משתנה מקטינה את התחממות המנוע ומשפרת את נצילות המערכת, ופיצוי מיקום מבטיח שהעומס יגיע למיקום הרצוי.
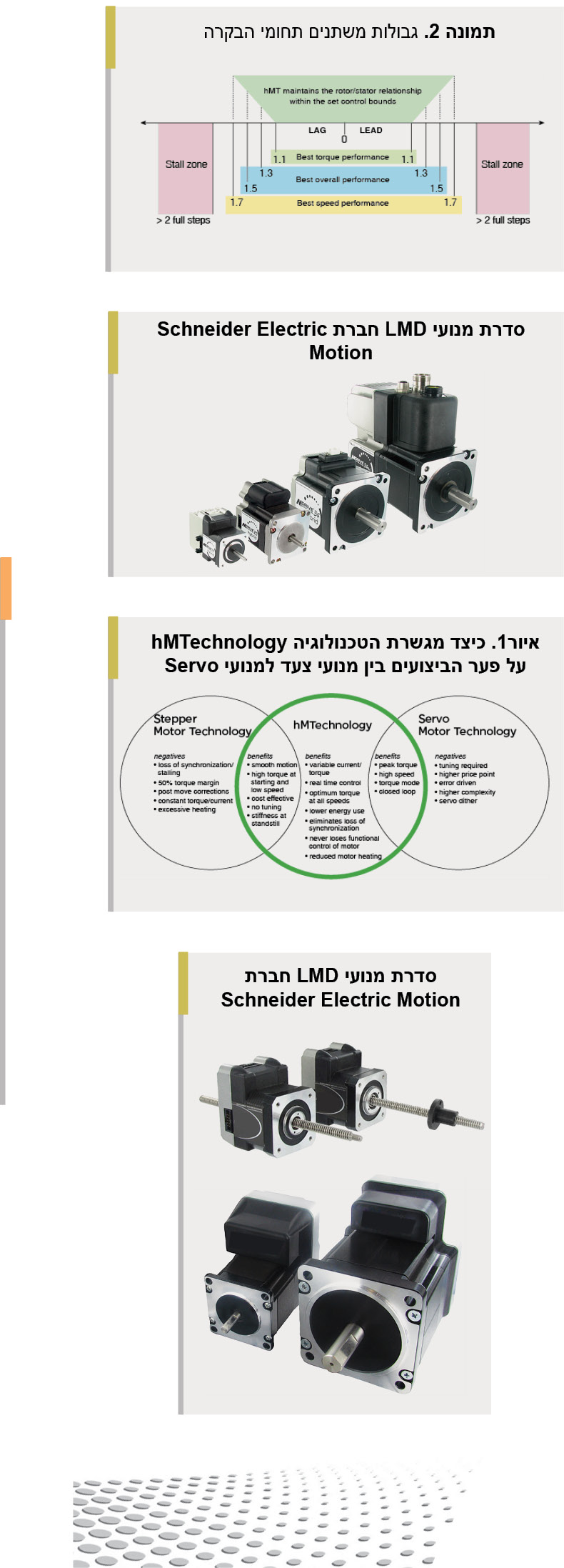
מגבלות משתנות של הקדמה ופיגור (תחומי הבקרה)
תחום הבקרה מגדיר את גודל השגיאה שמחייבת תיקון. (ראה תמונה 2).
ניתן לבחור באחד מבין ארבע תחומי הבקרה: 1.1, 1.3, 1.5 או 1.7 מצעד מלא של המנוע. תחום של 1.1 יפיק מומנט גדול יותר על אף שהמהירות המרבית תופחת. תחום של 1.7 יאפשר מהירות גבוהה יותר, על אף שהתגובה לתופעות מעבר תפחת.
הביצועים הכוללים הטובים ביותר מושגים בתחומים של 1.3 או 1.5 צעדי מנוע מלאים. למצב בקרת מומנט, התחום מוגדר מראש
ל-1.0 צעד מלא של המנוע.
בלי קשר להגדרות של תחומי הבקרה, מעגלי hMT ישמרו את המצב היחסי בין הרוטור והסטטור בתוך התחומים האלו ולא יאפשרו איבוד של הסנכרון.
שגיאת מקום
לצורך ייחוס: פיגור במקום, ייחשב כאשר הרוטור יפגר אחרי מקום הצעד שעבורו התקבלה פקודה, וההקדמה במקום נוצרת כאשר הרוטור מקדים את מקום הצעד שעבורו התקבלה הפקודה.
המערכת מתעדת ספירה של ההפרש (השגיאה) בין מיקום הצעד שעבורו התקבלה הפקודה לבין המיקום הממשי. הבקר המארח יכול לקרוא את שגיאת מיקום הצעד ולנקוט את הצעדים המתאימים באופן ובמועד הרצויים. חשוב לציין שמיקום הרוטור יכול להשתנות ביחס למיקום הסטטור, בערך שתוכנת עבור תחומי ההקדמה/הפיגור. כמו כן, אפשר גם למחוק באופן ידני את הספירה באמצעות פקודת תוכנה.
הבקר המארח יכול להגדיר את גבול הפיגור וההקדמה של המקום. כאשר המערכת תגיע לאחד הגבולות או תחרוג ממנו, יופיע דגל סטטוס. תופעה זו יכולה להיות מועילה כסימנים אפשריים לחיכוך חריג, כדרישה לתחזוקה למשל פעולות סיכה או לציון בעיות מכניות אחרות במערכת.
בקרת מומנט
אחת התכונות שהופכת את hMTechnology לייחודית, היא היכולת לשמור על מומנט קבוע. הלוגיקה של hMT עוקבת באופן רציף אחר ההיסט בהקדמה/פיגור בין הרוטור והסטטור.
במערכות של מנועי צעד, מומנט השיא זמין בציר, כאשר ההיסט בין הרוטור והסטטור נמצא בתחום של צעד מנוע מלא. מעבר להפרש זה, המומנט יתחיל לקטון עד לנקודה שבה יהיה הקדמה/פיגור של שני צעדי מנוע מלאים והמנוע יאבד סנכרון וייתקע.
מומנט המנוע משתנה ביחס ישר לזרם המסופק למנוע. הצעדים נוצרים בקצב שנדרש כדי ליצור פיגור של צעד מנוע אחד מלא, ולכן מהירות הציר תשתנה עם העומס מאפס (0) ועד TS (הערך המגדיר את מהירות המומנט).
פיצוי המיקום אינו זמין כאשר מצב מומנט מאופשר, אבל עדיין ייערך מעקב אחר המיקום ותתבצע שמירה שלו.
פיצוי מיקום
ניתן לאפשר פיצוי מיקום אוטומטי, אשר יוסיף צעדים על פי הנדרש, כאשר התנאים מאפשרים, בכיוון המתאים, על מנת להביא לאפס את הפרש המיקום בין מספר הצעדים שלגביהם ניתנה הפקודה לבין מספר הצעדים שננקטו בפועל, וכדי שהרוטור יהיה בתוך המתחמים המוגדרים.
המהירות של פיצוי המיקום (תדירות הפיצוי) יכולה להתבצע במהירות אחת מבין שתיים. הוספת הפיצוי יכולה להיות במהירות המוגדרת או אפשר להגדיר אותה למהירות המרבית שהעומס מאפשר. על פיצוי מיקום לא יחולו האצה או האטה כאשר המערכת תפעל במהירות מרבית, ולכן הפיצוי יכול להיות פתאומי במהירות גבוהה.
פיצוי מיקום יתרחש רק כאשר הפיגור/ ההקדמה של המנוע יהיו בתחום של 1.1 מצעדי מנוע מלאים, בלא כל תלות במתחמים שהוגדרו, עובדה שמספקת את המומנט המרבי.
כתלות בתנאים שונים, צעדי הפיצוי יכולים להשתלב בין הצעדים שמתקבלים ו/או להתבצע אחרי השלמת התנועה. נקודת הזמן שבה פיצוי המיקום מתרחש תלויה בהקדמה/פיגור של המנוע, בתדירות קבלת הצעדים ובמהירות הפיצוי שנבחרה.
דוגמה: התרחש פיגור מיקום כתוצאה מתאוצה חזקה במיוחד. אפשר לשלב את צעדי הפיצוי במהלך חלק הסיבוב של התנועה, אם תדירות הפיצוי גבוהה מתדירות הסיבוב. או – הפיצוי יכול להתבצע במהלך חלק ההאטה של התנועה, אם תדירות הפיצוי גבוהה יותר מהתדירות ההתחלתית. הפיצוי יכול היה גם להתבצע בסוף ביצוע פרופיל התנועה, אם תדירות הפיצוי נמוכה מהתדירות שהתקבלה בפקודה. הפיצוי יכול גם להתבצע במהלך מקטעים רבים של פרופיל התנועה.
עבור פרופיל תנועה רב עוצמה במיוחד, שהוא גם תלוי בזמן, ייתכן שלא תהיה כל הזדמנות לבצע פיצוי על צעדים חסרים במהלך הזמן שהוקצב לתנועה, ולכן התנועה לא תושלם במסגרת הזמן שהוקצה, מפני שצעדי הפיצוי יתבצעו בסוף התנועה.
פיגור מיקום בתנועות דו כיווניות, בלי הזדמנות לפיצוי, עלול ליצור היסט ביניים במיקום. לדוגמה: תנועה ימינה מ-A אל B גרמה לפיגור של 3 צעדים, תנועה שמאלה מ-B אל A, שבוצעה מייד לאחר מכן עלולה הייתה מלכתחילה לגרום למיקום סופי שהוא 3 צעדים משמאל ל-A. המיקום הסופי יתוקן, עם זאת מיקום הביניים היה אמור להיות בסטייה של 3 צעדים.
שגיאת המיקום נשמרת במונה של 32 סיביות, בעל סימן (signed). נתון זה מסתכם ב-41,943 סיבובים עם מיקרו צעדים (microstep) ברזולוציה של 256 חלוקות לכל צעד. אם נגיע לספירה המרבית, המונה יעצור את הספירה ותופק הודעת שגיאה. המונה לא יעבור גלישה (לא יתאפס במקסימום).
רוטור נעול
רוטור נעול מוגדר כרוטור ללא תנועה, כשהוא נמצא בפיגור המרבי המותר, במשך פרק זמן מוגדר. כאשר הפיגור שווה לגבול המתחם, קוצב זמן יתחיל למנות לאחור. כאשר יגיע לאפס, רוטור נעול יצוין בדגל הסטטוס. קוצב הזמן ייטען מחדש, עם כל תנועה של האנקודר. זמן הפקיעה של קוצב הזמן נתון לבחירת המשתמש בתחום שבין
2ms עד 65.5s.
כאשר מגדירים משטר עבודה של
Step/Direction או במשטר בקרת מהירות, נעילת הרוטור תיצור תקלה שתשבית את הדוחף. ניתן לאפשר מחדש את הדוחף (enable) על ידי כיבוי והפעלה של אספקת המתח, שינוי והחזרת מצב כניסת אפשור (enable) או באמצעות פקודת תוכנה.
במצב מומנט, רוטור נעול לא יגרום להשבתה של הדוחף. אפשר להשתמש בדגל "רוטור נעול" כדי לציין שהרוטור נעצר במומנט מוגדר, במשך פרק זמן שהוגדר מראש.
מכלולי Lexium MDrive
מוצרי Lexium MDrive מבית שניידר אלקטריק המשתמשים בטכנולוגיית hMTechnology מציעים פתרונות משולבים בעלות נמוכה, במקומות שבהם יש צורך במנועי Brush-Less עם בקרה בחוג סגור.
מערכות תנועה Lexium MDrive, שמשלבות סביבת הפעלה גמישה ורשימה ארוכה של תכונות, מציעות חבילה אטרקטיבית של יישומי בקרת תנועה, כגון: מיצוב נקודה לנקודה (point-to-point), בקרת מסועים, טיפול בחומרים בגלילים, קידוח, תחליפים למערכות הידראוליות ופנאומטיות וסימון מוצרים תוך כדי תנועה.
מוצרי Lexium MDrive מציעים למתכנני מערכות את הקלות שבאפשרות ההחלפה בין המוצרים. לכל גודל של מוצר יש מעטפת מוצר משותפת אחת (NEMA). באופן כזה, בחירה של פרוטוקולי תקשורת שונים — בין אם אלו הם Ethernet, RS-422/485 או CANopen לא תשנה את הגודל המכני של המוצר. אורך המוצר הכולל משתנה עם בחירה בדרגה יחידה, כפולה או משולשת במנוע NEMA בגודל 17, 23 ו-34 (42, 57 ו-85 מ"מ).
לשיפור קלות השימוש ולהפשטת החיווט, סוגי המחברים עם הנעילה עקביים על פני כל גודלי המוצרים. המחברים קשיחים, לחיבורם לא נדרשים כלים מיוחדים, ויש להם קידוד למניעת חיבור שגוי.
מנועים מוכללים ניתנים לבחירה בגרסאות הבאות:
מנוע ודוחף Pulse/Direction (פולס/כיוון), תקשורת RS-422/485, מצבי פעולה:
צעד/כיוון, בקרת מהירות, בקרת מומנט, בקרת מהירות עם כיוון
מנוע, דוחף ובקר Motion Control (בקרת תנועה), תקשורת RS-422/485, זיכרון: זיכרון (flash) של 11,120 Byte ו-336 תוויות משתמש.
מנוע, דוחף ובקר ברשת Ethernet, התקן נשלט (Slave) ברשתות EtherNet/IP ו-Modus/TCP או Profinet IO
מנוע, דוחף ובקר ברשת CANopen, DSP402.
הערה: הטכנולוגיה hMTechnology קיימת רק עבור מוצרי Lexium MDrive לשימוש בחוג סגור עם אנקודר משולב.
תועלות
פעולה חלקה במהירות נמוכה
ביצועים אמינים במהירות גבוהה
מומנט גבוה בתחילת פעולה
תכונה של מצב מומנט
הגנה מפני מתח יתר ומיתוג מתח ישר
תקשורת וכניסות/יציאות מבודדים
מחווני מצב ונוריות LED
חיסכון באנרגיה והורדת טמפ' עבודה
טכנולוגיית hMTechnology לשימוש בחוג סגור
טכנולוגיית hMTechnology מנטרת את מיקום ציר המנוע במרווחי זמן של תת-מיקרו שנייה, סוגרת את חוג המשוב ומבטלת מצבים שליליים רבים, שבאופן מסורתי מקושרים למערכות מנועי צעד. מבלי להגדיל את גודל המוצר, מוצרי Lexium MDrive לשימוש בחוג סגור ממזגים את היתרונות של מנועי צעד ומנועי Servo ומספקים ביצועים משופרים, לרבות:
צריכת אנרגיה נמוכה שמורידה את טמפרטורת העבודה של המנוע ומונעת התחממות
מומנט גבוה שמופק ממנועים קטנים לקבלת יעילות חסכונית
בקרה בחוג סגור בזמן אמת, שמונעת איבוד סנכרון
מערכת עם ביצועי Servo במחיר של מערכת מנועי צעד
ממשק RS-422/485 טורי
הממשק RS-422/485 הטורי קיים כסטנדרט בדגמי המוצרים הבאים:
כניסת Pulse/Direction (פולס/כיוון)
Motion Control (בקרת תנועה)
הממשק הטורי Lexium MDrive מתאפיין בתכונות הבאות:
כניסת תקשורת מבודדת
4.8 עד 115 קילו סיביות בשנייה
דופלקס מלא (422) או חצי דופלקס (485)
תקשורת מנקודה לנקודה, יכולת ריבוי חיבורים (Multidrop – 422) או בריבוי נקודות (Multipoint – 485) על ידי הגדרת כתובת באמצעות תווי ASCII (עד 62 התקנים).
ממיר USB ל- RS-422 מסוג plug-n-play
גירסה ללא בקר מיקום
את הגרסה הזו של Lexium Mdrive ניתן להגדיר באחד מארבעת המצבים הבאים::
מצב Pulse/direction: ההתקן יניע את מנוע הצעד על פי הייחוס שהועבר על ידי האותות בכניסה דרך ממשק ריבוי הפונקציות (multifunction interface).
מצב Speed/Control (בקרת מהירות): ההתקן יניע את מנוע הצעד במהירות עם כיוון שתיקבע על ידי מתח הייחוס שהוזן לכניסה האנלוגית של ממשק ריבוי הפונקציות. אותות הדופק נוצרים באמצעות מחולל אות שעון פנימי.
מצב Velocity/Control (בקרת מהירות עם כיוון): ההתקן יניע את מנוע הצעד במהירות קבועה עם כיוון שתיקבע על ידי כניסה של ערך מספר שלם דרך הממשק הטורי. אותות הדופק נוצרים באמצעות מחולל אות שעון פנימי.
מצב Torque Control (בקרת מומנט): ההתקן ישמור על מומנט קבוע בציר, לפי ערך שנקבע על ידי מתח ייחוס שיוזן לכניסה האנלוגית של ממשק ריבוי הפונקציות.
התפקיד העיקרי של הממשק הטורי במוצרי אותות דופק/כיוון, הוא קביעת מצב הפעולה והגדרת הפרמטרים השונים.
תקשורת טורית עקבית אל ההתקן נדרשת רק בשני תנאים:
1. ההתקן משמש במצב מהירות עם כיוון, כאשר פקודת סיבוב נשלחת מבקר
2. מצב פעולה או פרמטרים שיש לשונותם תוך כדי פעולה
Motion Control
(בקרת תנועה)
המנועים המוכללים ממשפחת Lexium MDrive מצוידים במערכת בקרת תנועה (Motion Control) הניתנת לתכנות באופן מלא ומאפשרת שליטה ובקרה על הכניסות והיציאות באמצעות כתיבת לוגיקה והגדרות פשוטות. מצבי הפעולה יכולים לשמש לסירוגין:
מצב מיידי: במצב מיידי (Immediate Mode), הידוע גם בשם פקודות בזרימת רצף, ההתקן יגיב לפקודות ASCII בתו אחד ובשני תווים, שנשלחות דרך ממשק אפיק
RS-422/ 485.
מצב תכנות: במצב תכנות אפשר לתכנת את ההתקן בריבוי של פונקציות, שגרות משנה ופעולות גומלין של תהליכים באמצעות שפת התכנות Mcode, המורכבת מסימני ASCII בתו אחד ובשני תווים. תכונות שנשמרו יכולות להתבצע על ידי ציון תווית לתוכניות SU כדי שיופעלו בשלב ההפעלה או באמצעות פקודה במצב מיידי.
ברוב המקרים יידרש חיבור טורי עקבי אל ההתקן, למעט מקרים שבהם ההתקן משמש בדרך שבה בקרה של תוכנית ותהליך מתבצעת דרך פעילות גומלין של קלט/פלט, ולא נדרש מידע לגבי הסטטוס של ההתקן.
מכלולי Lexium MDrive, מהווים את הדור הבא של מערכות משולבות של מנועי צעד, ונותנות פתרון יעיל זול ואמין ללקוחות שלא מוכנים להתפשר על איכות הביצועים שלהם אבל חייבים להוריד את עלויות המוצר/המכונה.
למידע נוסף בקרו באתר אבירי טכנולוגיות