










בראשית ימיהן של המכוניות, הן שימשו אך ורק כאמצעי תחבורה – מנקודה A לנקודה B. המכונית שינתה באופן מהפכני את עולמנו, אך זו הייתה רק הקדמה לחידושים שעמדו להגיע. מכוניות הפכו חכמות ככל שנוספו להן מכלולים חכמים, כגון מערכות עזר לנהג מסוג ABS והגה-כוח. כיום, עם בינה מלאכותית (AI), כלי רכב שמסוגלים לנסוע בעצמם כבר נמצאים באופק. אחד ממרכיבי המפתח לכלי רכב אוטונומיים (AVs) הוא היכולת לעקוב אחר מיקום הרכב ותנועתו. עם כניסתה של טכנולוגיית GPS מסחרית לתחום הרכב בשנות התשעים , מעקב אחר תנועה הפך למשימה קלה יחסית. הטכנולוגיה הזו פתחה את הדלת למספר יישומים לניווט ותכנון מסלול. עם זאת, ל-GPS יש גם מגבלות, שכן הוא מציע רמת דיוק של מטרים ספורים בלבד, כך שהשימוש ב-GPS מוגבל ליישומים בהם אין צורך במעקב אחר תנועות בטווחים קטנים ("Micro-Movements"). באזורים מסוימים בהם הגישה ללווייני GPS מוגבלת (ערים עם בניינים גבוהים, הרים וכו'), אין גישה לנתונים שמספק GPS, כך שהשימוש בו מיותר. ככל שכלי הרכב הופכים להיות יותר "מודעים" לסביבתם, מעקב אחר Micro-Movements הופך להיות הכרחי; לכן עלינו לחפש פתרונות אחרים, מעבר ל-GPS.
טכנולוגית מיקום ומיפוי סימולטניים (SLAM – Simultaneous Localization And Mapping) יכולה לכוון אתכם עד לרמת דיוק של סנטימטרים ולא דורשת קישוריות ללוויין. טכנולוגית SLAM מתבססת על האתגר החישובי הכרוך בבניית מפה בסביבה לא ידועה ובמקביל, מעקב אחר מיקומכם בסביבה זו. טכנולוגית SLAM כוללת מעקב אחר מערכת צירי סיבוב בעלת שש דרגות חופש (6DoF), המורכבת משלוש דרגות למיקום (מעלה/מטה, אחורה/קדימה, ימינה/שמאלה), ושלוש לנטייה (סיבסוב – Yaw, עלרוד – Pitch וגלגול- Roll) להבנת המיקום שלכם בסביבה (איור 1).

לטכנולוגית SLAM שימושים נרחבים; לדוגמה, ניתן להשתמש ב-SLAM כדי לזהות היכן אתם פונים ביחס לסביבה – למשל, פנייה לכיוון צפון-מערב בצומת – היישום יציין אם לפנות ימינה או שמאלה. חישוב פשוט של GPS רק יאמר לנו שאנו נמצאים בצומת; היישום לא ממש יודע לאיזה כיוון פנינו עד אחרי שכבר המשכנו בכיוון הלא נכון.
SLAM הופכת במהירות למונח חשוב בתחום הראייה המוטמעת (Embedded Vision) מכיוון שהיא מאפשרת להתקן כלשהו לקבל מודעות על מיקומו ביחס לסביבה. באמצעות SLAM, כלי רכב יכול לא רק לעקוב לאן הוא פונה או מהו הכיוון שלו אוריינטציה), אלא גם כיצד הוא נע בתוך סביבתו (מיקום, מהירות וגובה). בשנים האחרונות, הודות לזמינותם של חיישנים נוספים ומתקדמים יותר, התפתחה טכנולוגית SLAM מחיישני מצלמה (VSLAM – Visual SLAM) לאפשרות של כניסות חיישנים נוספים. מערכת SLAM פועלת על ידי מעקב אחר קבוצת נקודות באמצעות צילומי מצלמה רצופים ונתוני חיישן אחרים. זאת, כדי לקבוע את המיקום בתלת-ממד של המצלמה, ובו-זמנית להשתמש במידע זה בכדי לשערך את כיוון המצלמה (או חיישן אחר). כל עוד יש מספיק נקודות מעקב בכל פריים של צילום, ניתן להבין במהירות מהו כיוון החיישן (או חיישנים) וגם את מבנה הסביבה הפיזית שמסביב. לדוגמא, בהטמעה של טכנולוגית SLAM בכלי רכב אוטונומיים, ניתן לשלב מצלמה אחת או יותר הפונות קדימה, מכ"ם, חיישן LiDAR (טכנולוגיה למדידת מרחק על ידי קרן לייזר) ויחידות מדידה אינרציאליות (IMUs, המספקות נתונים מחיישני תאוצה וג'ירוסקופים שמסייעים להעריך מיקום החיישן) כקֶלֶט.
כאשר נתוני GPS זמינים, ניתן לעשות בהם שימוש על מנת לחזק את ההערכה לגבי המיקום המדויק. איור 2 מציג דוגמא לכלי רכב שמותקנים סביבו מגוון חיישנים, כמו מצלמה, LiDAR ומכ"ם שיכולים לשמש כאמצעי קלט עבור טכנולוגית SLAM.

טכנולוגית SLAM מהווה מרכיב מרכזי ביישומים רבים המשמשים לסיוע לנהג ולכלי רכב אוטונומיים. כמה מהיישומים הללו כוללים:
- סיוע בשמירת נתיבים (והתראת סטייה מהנתיב): בנוסף למעקב אחר סימוני הנתיב בכביש, טכנולוגית SLAM מבטיחה החלפה בטוחה בין הנתיבים.
- ניווט: על ידי הבנת התנועה מסביב, בשילוב עם יישום מסלול מתוכנן ונתונים שמגיעים ממקלט ה-GPS, כלי הרכב יכול לנווט את עצמו ליעד הרצוי.
- התראת התנגשות מלפנים (FCW): בשילוב עם SLAM ניתן להשתמש במסלול תנועת הרכב על מנת להתריע באופן משמעותי יותר מפני התנגשות.
מגמות שוק ה- SLAM
כפי שמוצג באיור 3, גודל השוק ליישומים מבוססי SLAM צפוי לעבור את רף שני מיליארד דולרים עד שנת 2024. המניעים העיקריים לצמיחת שוק זה הם ההתקדמות באלגוריתמים וצמיחתה של טכנולוגיה זו בשווקים שונים. ההתפתחויות הטכנולוגיות הנוסקות לצד העלייה במודעות ליתרונות שמציע ה- SLAM , יוצרות את הביקוש בשוק. ההתעניינות הגוברת בטכנולוגיה, במיוחד מצד תעשיות כלי רכב אוטונומיים ומציאות מדומה ורבודה, הובילו לאימוץ טכנולוגית SLAM ברחבי העולם ולהפצתה. במהלך חמש השנים האחרונות, חברות טכנולוגיה מובילות השקיעו משמעותית ב-SLAM על מנת להשתלב באסטרטגיות שונות להתרחבות עסקית כגון פיתוח מוצרים חדשים וכן מיזוגים ורכישות.

דרישות טכנולוגיות
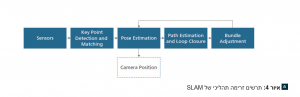
כל אחת מלבני הדיאגרמה מבוססת על גישה קלאסית לראייה ממוחשבת (Computer vision). עם זאת, הן מסתמכות משמעותית על מגוון פעולות אלגברה ליניאריות ומטריצות, כך שמבחינה חישובית הן כבדות וניתן ליישמן על גבי מעבד CPU או GPU.
השימוש ב-CPU אידיאלי לשימוש כללי ולאבות-טיפוס, אך הוא מספק ביצועים מוגבלים. מגבלה אחת היא מספר קטן של נתיבי עיבוד באופן מקביל. שנית, הוא אינו חסכוני בחשמל, כך שלא בטוח שהוא האפשרות הטובה ביותר לשקול וכמו כן, במקרים מסוימים יתכן שהוא לא יוכל לספק ביצועים של SLAM בזמן-אמת.
מנגד, ל-GPU מגוון אפשרויות לחישוב מקבילי, שיכולות לסייע בהשגת רמת ביצועים גבוהה ובעמידה בדרישות זמן אמת. אבל שוב, ה-GPU הוא זללן הספק המייצר חום רב. בנוסף, יצרני רכיבים אינם יכולים להצדיק את כמות השטח שמוקצה ל-GPU על הרכיב, רק בשביל שיטת החישוב שהוא מציע.
כאן נכנס DSP ייעודי (מעבד אותות דיגיטלי). מעבדי DSP ניתנים לתכנות עשיר ודורשים רק שטח פיזי קטן, מה שמקל על הטמעתם ההמונית במכשירים עבור שווקים שונים.
לסיכום, מאמר זה התמקד בגישות ראייה ממוחשבת (Computer vision) להטמעת SLAM ברצף הפעולות. ההתקדמות העדכנית בפיתוח נעשתה על ידי שילוב של רשתות נוירונים (Convolutional Neural Network – CNN) בכדי לשפר את שלב התאמת נקודות המפתח וחילוץ התכונות בתרשים הבלוקים של ה-SLAM ביחד עם שינויים בתוך בלוקים נוספים.
מעבד התמונה של קיידנס טנסיליקה ה-Q7 Vision (הדור השישי של מעבדי ראייה ממוחשבת ממשפת טנסיליקה) תומך בחישוב שכבות רבות של רשתות נוירונים העדכניות ביותר ומאפשר שילוב והתכה בין עיבוד התמונה הקלאסי ולמידת המכונה (AI). השילוב ההרמוני בין עיבוד תמונה לבין AI הוא המפתח להצגת הדור הבא של יישומים מבוססי SLAM עבור שוק הרכב, שוק שיוכל לשגשג רק עם המעבדים המתאימים עבור היישומים הספציפיים הללו.
