









רובוט בעל ארבע רגליים הוא כבר לא משהו חדש בתחום הרובוטיקה, כל שכן הרובוטיקה הצבאית. כבר לפני שלוש שנים ניסו כוחות המארינס האמריקנים את הפרד המכני, זה שדימה בצורתו החיצונית ואופן ההליכה שלו חיה בעלת ארבע רגליים מפרקיות. הניסוי ההוא נגנז בשל בעיות בפלטפורמה והרעש שיצר הפרד המכני במהלך ההליכה.
אלא שהחזון זה של רובוטים מפרקיים, כאלה שיוכלו לחקות את תנועתם ואופן פעולתם של בני אנוש או חיות מפרקיות לא נזנח. במקביל לפיתוח עצמו של הפלטפורמה מפותחים במקביל כלי שליטה ובקרה לניהול "עדר" רובוטים במשימה מבצעית. ניסוי וירטואלי כזה נערך במכון המחקר השוויצרי ETH יחד עם יצרנית השבבים INVIDIA – החברה שרכשה לפני שנתיים את מלאנוקס הישראלית. בניסוי שנערך בחודש אוקטובר האחרון נערכה סימולציה ל "צבא" של 4000 רובוטים בעלי ארבע רגליים דמוי כלב. הניסוי כלל שלב וירטואלי של לימוד מבוסס בינה מלאכותית ואחר כך הטמעה של האלגוריתם הנלמד בפלטפורמה רובוטית פיסית. מעבר להפעלה המקבילה של אלפי רובוטים , ניתן בניסוי עצמו דגש על למידה עצמית של הרובוטים שהתבססה על למידת מכונה. בכל פעם שהרובוט התגבר עצמאית על משימה מורכבת כמו למשל מדרון חלק, או מעבר שטח מדורג, ניתנה לו משימה מורכבת יותר בכדי לתת לאלגוריתם להשתכלל.
"הניסוי הזה ללא ספק קידם אותנו משמעותית,סימולציה מהירה ברמה כל כך גבוהה של ביצועים היא לא עניין יומיומי", אמר לאתר WIRED פרופסור פיטר אביל מאוניברסיטת ברקלי. אביל ייסד בעצמו חברת סטראט אפ ללימוד רובוטים בעזרת בינה מלאכותית. החברה שלו Covarian מתמקדת ברובוטים שפועלים במרכזים לוגיסטיים ומלקטים סחורות בשטחי אחסון גדולים.

רובוט ANYMAL שהשתתף בניסוי הסימולציה
צילום: ANYBOTICS
מהנדסי הניסוי טוענים שחלק מההצלחה שלו היא השתכללות האלגוריתם תוך כדי פעולה של הפלטפורמות עצמן באופן וירטואלי. "עצם ההתנסות מייצרת ערך מוסף. אי אפשר לכתוב שורת קוד לצורה שבה הרובוט צריך להתנהג בסביבה רטובה וחלקה. ההתנסות שלו במצב הזה גורמת לו להתנהג אחרת, וזה ערך חישובי שניתן להשיג רק בניסוי עצמו".
הרובוט שבו נעשה שימוש פיסי לאחר השלב הוירטואלי הוא ה ANYmal של חברת ANYbotics משוויץ. החברה נוסדה על ידי מדענים חברי המכון כחברת סטארט אפ לפיתוח יכולות רובוטיות על בסיס ANYmal. זה רובוט בעל 4 רגליים וגודלו מקביל לכלב גדול. הוא בעל חיישנים בחלקו הקדמי המדמה ראש וזרוע רובוטית מתפרקת. בשלב הוירטואלי של הניסוי כל 4000 הרובוטים שבסימולציה אומנו בעזרת טכנולוגיה של "למידת חיזוק" reinforcement learning. זו שיטה של בינה מלאכותית ששואבת השראה מהאופן שבו בעלי החיים לומדים באמצעות משוב חיובי או שלילי. כך למשל האלגוריתם עקב אחרי הצעדים של הרובוט, מדד בין השאר את מהירות התנועה והזווית, ועל ידי כך התאים את מנועי הרגליים של הרובוט למציאות בשטח. הסימולציות נעשו בעזרת שבבים מיוחדים של חברת NVIDIA המיועדים לבינה מלאכותית בשונה מאלה שמיועדים למחשבים וכוננים. הם איפשרו מהירות חישובית גדולה פי מאה משבבים רגילים, מה שהביא למהירות תגובה גדולה יותר של הרובוט.
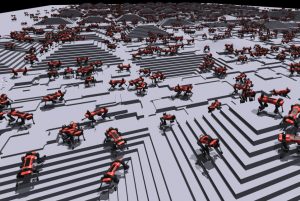
ניסוי הסימולציה של 4000 רובוטים
צילום: NVIDIA
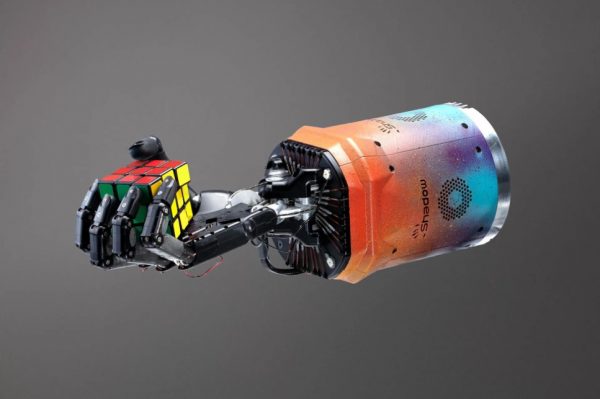
הצירוף של מהירות חישובית גדולה עם יכולת סימולציה שגורמת ללימוד מכונה נחשבת לפורצת דרך. בעבר כדי להשתמש בטכניקה של reinforcement learning היה צורך לתת לרובוט משימה פיסית ארוכה של כמה שבועות, כדי שהאלגוריתם יפתח את הידע כיצד להתגבר על כך. דוגמא לכך ניתנה בניסוי של חברת OpenAI שפיתחה זרוע רובוטית שהרכיבה בשלמותה קוביה הונגרית ביד אחת. לרובוט במקרה הזה לקח כשנה וחצי להגיע לפתרון, כשעדיין הוא מצליח באופן מלא רק ב 60 אחוז מהמקרים.
"השימוש הגובר בסימולציית רובוטים חשוב מאד במיוחד בפיתוחים לעולם האזרחי. היא מהירה יותר בכל מה שקשור להוכחת התכנות וזולה יותר משום שהיא לא מצריכה בהרבה מקרים ניסוי פיסי שיכול להשבית את הרובוט לפרקי זמן. אם הניסוי עצמו נכשל אפשר מיד לאתחל אותו, זה היתרון הגדול בסימולציה. אין ספק שזה כלי שמאיץ את הפיתוח אבל הוא עדיין בעל מגבלות. לא פעם המרחק בין ההצלחה בסימולציה ליישום הפיסי גדול", אומר בראיון למגזין WIRED טולי פוט, מנהל חברת Open Robotics Foundation, שמפתחת תוכנות פתוחות לשימושים רובוטיים אזרחיים.
בחזרה לניסוי עצמו. התרחיש שניתן דימה מעין נחיל נמלים רובוטיות בתא שטח מסויים. כל אחד מהרובוטים התמודד עם משטחים שונים בסיבה רוחשת פעילות. במשימות מורכבות הוכח שלרובוט לוקח זמן ארוך יותר, כחלק מתהליך הלמידה של האלגוריתם. מה שעוד הפתיע היה שחלק מהרובוטים שהגיעו למשל למדרון, הצליחו לאחר לעבור אותו לאחר מספר נסיונות, בעוד שאחרים נכשלו. האלגוריתם שנלמד בסימולציה בשלב הוירטואלי, נלקח אחר כך לרובוט אמיתי, וזה הצליח לעבור פיסית את המכשולים, אם כי התקשה לעשות זאת כשהתבקש לנוע במהירות גדולה יותר. החוקרים הסבירו את זה באי דיוקים בתפיסה המרחבית של הרובוט הפיסי, שהקשו עליו לדמות את הסביבה האמיתית.
בשורה התחתונה הניסוי הזה הוכיח כי ניתן להאיץ תהליכי למידת מכונה מבוססי בינה מלאכותית בעזרת שימוש בתהליכי סימולציה. לדעת החוקרים בעזרת הפתיוח הזה ניתן יהיה ללמד כך רובוטים תנועות אנושיות מורכבות ועדינות כמו לסרוג, לתפור, לקצור או ללקט מוצרים נבחרים מהמדף.
תמונת כותרת: זרוע רובוטית מרכיבה קוביה הונגרית. צילום: OPENAI
