



הקדמה
בתחום הרובוטיקה, היכולת לחקות את חוש המישוש האנושי היא קריטית. יכולת זו מאפשרת לרובוטים להבין ולתפקד באופן יעיל עם הסביבה שלהם. חיישני מגע מבוססי ראייה הם בחוד החנית של טכנולוגיה זו, המשלבים נתונים חזותיים עם משוב מגע כדי להבין טוב יותר משטחים וחומרים שונים. מאמר קצר זה בוחן כיצד פועלים חיישנים אלה, היישומים שלהם וההשפעה המשמעותית שיכולה להיות להם על פני תעשיות שונות.
חיישני מגע מבוססי ראייה
חיישני מגע מבוססי ראייה משתמשים בעקרונות דימות ואופטיקה כדי לזהות מאפייני עצמים באמצעות מגע. חיישנים אלה כוללים מצלמה בתוך "עור" גמיש שמשנה צורה בעת מגע. עיוות זה נרשם ומנותח כדי לחלץ מידע מפורט על המגע, כגון כוח, מרקם, צורה וטמפרטורה. חיישנים אלה מציעים רמת פירוט עדינה יותר מחיישני מגע מסורתיים המסתמכים על שינויים פיזיים בהתנגדות או בקיבוליות, ורוכשים יתרונות נוספים מלימוד מכונה. שילוב זה עוזר להם לזהות תבניות ומרקמים מורכבים, לשיפור הדיוק והאמינות שלהם בסביבות דינמיות. התקדמות טכנולוגית אחרונה הובילה לחיישני מגע מבוססי ראייה זולים יותר, כגון GelSight ו-DIGIT, המשלבים צילומים פנימיים של מצלמה עם תנועות רובוטיות כדי לייצר נתוני מגע מפורטים ועשירים בהקשר שניתן לנתח אותם כמו תמונות מצלמה רגילות. זה מעמיק את ההבנה של אינטראקציות מגע, ומאפשר לרובוטים לבצע מטלות מורכבות יותר.
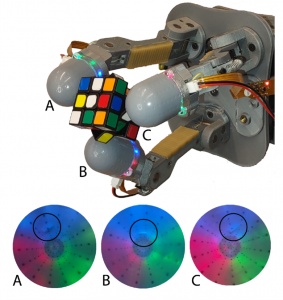
איור :1 שלושה חיישני AllSight על אצבעות של יד רובוטית אדפטיבית. החיישנים מספקים תמונות מגע בזמן אמת להערכת מצב המגע במהלך אחיזה של עצם. עיוות המשטח עקב מגע מסומנים בעיגול בתמונות המגע התחתונות

## תמונה 2: תמונות מגע בזמן אינטראקציה של AllSight עם (משמאל לימין) לוח מעגלים, מברג, צבת נעילה, בורג ו-X בולטת.
הצורך בהבנה מרחבית
רובוטים הפועלים בסביבות משתנות צריכים תחילה להבין את היחסים המרחביים שלהם עם עצמים כדי לטפל בהם בצורה יעילה – דרישה בסיסית ככל שרובוטים משתלבים יותר עם בני אדם מחוץ לתנאים מבוקרים. בניגוד לשיטות המסתמכות אך ורק על פיקוח מקצה לקצה, חיישני מגע מבוססי ראייה מספקים ייצוגים תלת ממדיים עקביים, המהותיים לזריזות בתוך היד ולהכללה של מדיניות פעולה. המוקד הקונבנציונלי היה על מעקב אחר עצמים מוכרים באמצעות ראייה כחוש העיקרי, אך האתגר האמיתי הוא בהשגת תפיסה כללית וחזקה שתוכל להתאים לסביבות מגוונות ובלתי מוכרות. מערכות ראייה לעיתים קרובות נכשלות עקב בעיות כמו תאורה חלשה, שקיפות וחזרתיות, אשר פוגעות בתועלת שלהן ביישומים מעשיים. גם הסתרות עצמיות במהלך אינטראקציות כגון סיבוב ושינוי כיוון יוצרות אתגרים משמעותיים. חישת מגע מציעה אמצעי ישיר להתגבר על מכשולים אלו, ומספקת נתונים חיוניים שהראייה לא יכולה ללכוד לבדה. מחקרים קוגניטיביים בבני אדם תומכים בשילוב של מגע וראייה, ומדגישים את אופיים המשלים בשיפור התפיסה הרובוטית.
הבנת מידע החישה:
ישנן 2 שיטות נפוצות לניתוח המגע, שיטות גיאומטריות ושיטות מבוססות למידה עמוקה. הראשונה נקרית סטריאו פוטומטרי. טכניקה זו מנתחת נתוני אור ותמונה כדי לשחזר מידע על גבי המשטח הג'ל על ידי הקרנת אור מכיוונים שונים על גוף וצילום השינויים בעוצמה המתקבלים באמצעות מצלמה, בעזרת ידע מבנה הסנסור ניתן לחשב את וקטור נורמל המגע על המשטח בכל נקודה. שיטות נוספות שלאחרונה תופסות תאוצה הינן שיטות מבוססות למידה. על ידי אימון אלגוריתמי למידה עמוקה על מאגרי נתונים גדולים של קריאות חיישן ומידע משטח תואם, שיטות אלו יכולות ללמוד את היחסים המורכבים בין וריאציות אור, עיוותים משטח ותכונות חומר. זה מאפשר להם להשיג שחזור וקטור נורמלי יציב יותר גם במצבים עם בקרת תאורה מוגבלת ועיוותים לא צפויים.
AllSight: חיישן מגע אופטי חדשני
בתגובה לקשיים בייצור ובכיול של חיישני מגע ברזולוציה גבוהה ליישומי רובוטיקה, אנחנו מציגים את החיישן שלנו, AllSight, חיישן מגע אופטי חדשני המותאם במיוחד למשימות מניפולציה בתוך היד. AllSight בולט בזכות המבנה העגול התלת ממדי הייחודי שלו, הדומה בגודלו ובצורתו לאגודל אנושי, מה שהופך אותו מתאים במיוחד לביצוע מניפולציות מפורטות ש ידיים רובוטיות נדרשות לבצע. אחד היתרונות המשמעותיים ביותר של AllSight הוא תהליך הייצור שלו: החיישן מודפס בעיקר בתלת מימד, דבר שלא רק מפחית עלויות אלא גם משפר את המודולריות והעמידות שלו.

## תמונה 3: הדמיה של AllSight (1) מורכב ו-(2) בתצוגת תוך כדי פירוק. (3) רואים תמונות של החלקים המיוצרים המקבילים, כולל אלסטומרים מסומנים וברורים. (4) שלושה תצורות תאורה LED שונות כאשר (5) AllSight נמצא במגע עם בורג: (4a) לבן, (4b) RRRGGGBBB ו-(4c) RGBRGBRGB.
העיצוב של AllSight משלב משטח מגע גדול, המאפשר הערכת מצב מגע רחבה ומדויקת באמצעות למידה עמוקה, כולל מיקום, כוחות ומומנט. חיישן זה נבדק בקפדנות באמצעות מבחר של ניסויים המשווים תצורות שונות של תאורה וחומרים אלסטיים במגע, ומדגישים את היכולת שלו להתאים לצרכים תפעוליים שונים. ראוי לציין שהעיצוב החזק של AllSight כולל יכולת "ירי אפס", כלומר ניתן לייצר אותו מתכנון קוד פתוח ולהשתמש בו באופן מיידי ללא צורך כיול אישי. תכונה זו מועילה במיוחד עבור אנשי מקצוע המחפשים חיישן אמין ומוכן לשימוש עבור משימות רובוטיות מורכבות. הנתונים הניסויים שלנו מאשרים ש-AllSight מספק הערכת מצב מדויקת, וסימן להיותו התקדמות משמעותית בתחום טכנולוגיית חישת המגע.

תמונה 4: מערכת איסוף נתונים הכוללת זרוע רובוטית וחיישן F/T עם מספר חודרנים. במהלך מגע מתוכנן מראש, תמונות מסומנות עם מיקום מגע ועומסים. (a) חלק איתור המגע של הדגם מאומן מראש באמצעות נתונים מדומים בסימולציה לאחר מכן, מבוצע כוונון עדין של כל דגם הערכת המצב באמצעות נתונים אמיתיים. תמונות התייחסות מהחיישן האמיתי משמשות להגדלת הנתונים שנאספו וליצירת נתונים מדומים לאימון מראש של דגם המגע.
למידת המגע ב-AllSight
AllSight תוכנן לזהות את המיקום המדויק של המגע על פני השטח שלו ולמדוד את הכוח והמומנט הנלווים. אימנו אותו באמצעות למידה מונחית. אספנו נתונים באמצעות תצורה אוטומטית הכוללת זרוע רובוטיתת מצוידת בחיישנים למדידת כוח ומומנט, כפי שניתן לראות בתמונה 4. זרוע זו נוגעת בחיישן AllSight באופן אקראי, תוך שימוש בלחצים וכלים שונים.
שילבנו גם את AllSight בסימולטור פיסיקאלי, אשר תוכנן במיוחד עבור חיישני מגע אופטיים. כוונונו את הגדרות של הסימולטור באמצעות תמונות חיישן אמיתיות וביצענו כוונון עדין של התאורה כדי לשקף תנאים מהעולם האמיתי. שדרגנו עוד יותר את הסימולטור על ידי הכנסת רעש ויזואלי ושינוי התאורה, מה שהופך את הסימולציה למציאותית יותר. שילבנו תמונות מדומות ותמונות אמיתיות יחד לעיבוד על ידי הדגם, שכללנו את המערכת שלנו לחיזוי מדויק של קריאות החיישן. החלנו בנתונים מדומים, ובהדרגה שילבנו נתונים אמיתיים כדי לכוונן את הדגם שלנו לפעולה מדויקת בעולם האמיתי.
סיכום
חיישני מגע מבוססי ראייה מקדמים באופן משמעותי את היכולות הרובוטיות, ומספקים גישה משולבת והוליסטית יותר לתפיסה חושית. על ידי שיפור המשוב המגעי והמודעות המרחבית, חיישנים אלה לא רק משפרים את הדיוק והפונקציונליות של רובוטים אלא גם את היכולת שלהם לנהל אינטראקציה ולהתאים את עצמם לסביבות חדשות. טכנולוגיה זו מבשרת עתיד שבו רובוטים יוכלו לחקות במדויק יותר את היכולות החושיות והקוגניטיביות של בני אדם, מה שיוביל ליישומים רחבים יותר ואינטגרציה עמוקה יותר בחיי היומיום.




