מאת: Eva Murphy & Colm Slattery, Analog
מאת: Eva Murphy & Colm Slattery, Analog
בסוגים רבים של ציוד, חשוב ליצור ולבדוק מיידית צורות גלים מדויקות בתדרים ובפרופילים שונים. דוגמאות לכך כוללות מקורות תדרים מהירים בעלי רעש מופע ותוכן אותות כוזבים (spurious) נמוכים עבור תקשורת, וגירויי (stimuli) תדר מופקים בצורה פשוטה עבור יישומי תעשייה וביו-רפואה. ביישומים כאלה, היכולת להפיק צורת-גל מתכוונת ובאופן נוח וכדאי מהווה שיקול תכנון עיקרי.
גישות שונות שימשו בעבר, אך הגמישה ביותר היא הסינתזה הדיגיטלית הישירהdigital synthesis1 – DDS) (direct. שבב 2DDS, או direct digital synthesizer, מפיק צורת-גל אנלוגית – לרוב גל סינוסי, אך גם גלים משולשים ומרובעים מקובלים – על-ידי הפקת אות משתנה-בזמן בצורה דיגיטלית וביצוע לאחר מכן של המרת מדיגיטלי לאנלוגי D/A)). התקני DDS הם בעיקר דיגיטליים, כך שהם יכולים לבצע מיתוג מהיר בין תדרי המוצא, רזולוציית תדר מעולה ופעולה בתחום רחב של תדרים.
בעקבות התפתחות טכנולוגיית התכנון והתהליכים, התקני DDS הם כיום קומפקטיים ביותר וצורכים מעט הספק. התקני DDS זמינים כעת3 ויכולים להפיק תדרים החל מהרבה מתחת ל-1 הרץ ועד 400 מגה-הרץ (מבוסס על שעון של 1 גיגה-הרץ), עם רזולוציה בזמן של עד 48 ביטים. העלות הנמוכה של התקנים המשתמשים בטכנולוגיות תהליך חדשות – בשילוב עם הביצועים המצוינים באורח טבעי של ה-DDSs והיכולת לתכנת (גם מחדש) את צורת-הגל במוצא – הופכים את גישת ה-DDS למאוד אטרקטיבית בהשוואה לפתרונות מסורתיים יותר דיסקרטיים ופחות גמישים. התקני DDS מרובי-ערוצים, דוגמת הAD99584 הדו-ערוצי וה-AD99595, בעל ארבעה ערוצים, מאפשרים תכנות עצמאי של עד ארבעה מוצאים מסונכרנים במערכות מוגבלות במקום (כגון מכ”ם/סונר בעלי מערך-מופע (phased-array), ATE, הדמיה רפואית ותקשורת אופטית).
מטרתנו כאן היא לצייד את הקורא בהבנה על שימושים מועטים אך חשובים של ה-DDS ביישומים קיימים, ולספק היבט מעמיק על יתרונות-המפתח שהתקני ה-DDS מביאים לאלה וליישומים פוטנציאליים נוספים. נכון להיום, שתי הצורות העיקריות של יישומים המשתמשים ב-DDS הם יצירת צורות-גל בתקשורת וניתוח אותות בתעשייה ובביו-רפואה. שימושים חשובים אחרים כוללים בקרת עצמים אלקטרונית (electronic article surveillance -EAS) ויישומים ימיים במערכות sonobuoy (מצוף ציתות ומעקב אחר צוללות, להלך – מצוף).
יישומים חשובים קיימים במערכות תקשורת הדורשות מקורות תדר גמיש בעלי רעש מופע ודורבנים (spurs) נמוכים, המשלבים –כפי שעושה ה-DDS- רזולוציית כיוונון-תדר מצוינת וביצועים ספקטראליים. שימושי DDS טיפוסים אחרים בתקשורת כוללים הפקת אותות מחוון (pilot) עבור זיהוי WDM בערוץ אופטי, תדרי ייחוס בעלי כיוונון משופר עבור עניבות נעולות-מופע (phase-locked loops – PLLs), כגון מתנדים מקומיים, או אף לשידור ישיר.
בסיווג ניתוח האותות, תכנונים תעשייתיים וביו-רפואיים רבים משתמשים ב-DDS כדי להפיק בצורה דיגיטלית צורות-גל מיתכנתות בעלי תדר ומופע מתכוונים בנקל- ללא הצורך לשנות כל רכיבים חיצוניים, כפי שקורה רבות עם מחוללי צורות-גל מסורתיים. כיוונוני תדר פשוטים יכולים לשמש לאיתור תהודות או לקיזוז שינויים בגלל הטמפרטורה. DDS יכול לשמש כגירוי תדר גמיש למדידת עכבת חיישן, או כדי להפיק אותות מאופננים ברוחב הפולס עבור מיקרו-מפעילים (microactuators), או כדי לבחון ניחות ב-LANs או בכבלי טלפון.
יישומים בתעשייה וברפואה
ניתוח רשתות בעלות מחוללי אותות: יישומים רבים באלקטרוניקה של היום כוללים איסוף ופענוח נתונים עבור עיבוד אותות דיגיטלי, מדידות אנלוגיות, סיבים אופטיים ותקשורת בתדר גבוה.
סוג זה של יישומים כולל גירוי של מעגל או מערכת בתדרים בעלי אמפליטודה ומופע ידועים, וניתוח מאפייני ההיענות כדי לקבל מידע מערכת חיוני. ה”רשת תחת ניתוח” (איור 1) יכולה להיות כל דבר החל מאורך של כבל ועד מערכת מדידה/חיישנים. הדרישה הטיפוסית היא להשוות את אות(ות) ההיענות לאות המבוא במופע, תדר ואמפליטודה.
כאשר שורת תדרים דרושה לשם עירור, שבב DDS מתאים בדיוק, מאחר שניתן לשלוט בתוכנה בתדר, מופע ואמפליטודת הגירוי עם רזולוציה מאוד צמודה.
המערכת עובדת על-ידי הזנת אות בעל תדר, אמפליטודה ומופע ידועים לנקודה V1 של הרשת (המוצגת כמעגל פסיבי לשם פשטות) באיור 2. האמפליטודה והמופע של האות בנקודה V2 ישתנו בתלות במאפייני הרשת. הפרש הזמנים בין האותות V2 ו-V1 מאפשר למשתמש לחשב את היסט המופע, והשינוי באמפליטודה ייתן את היסט האמפליטודה היחסי. ההפרשים בספקטרומי התדר שלהם יכולים לספק את מידת העיוות. אם יודעים את תגובת המופע והאמפליטודה של המערכת הנבדקת, אפשר לחשב את פונקציית המעבר שלה.
]תדרים טיפוסיים המשמשים ביישומים אלה יכולים לנוע בין 0 קילו-הרץ עד 200 קילו-הרץ, בקצה הנמוך של תחום הטיפול בתדר של ה-DDS. עבור יישומים מסוימים, פרץ של תדר ידוע אחד מספק מידע מספיק; אך עבור רובם דרוש לסרוק תחום של תדרים ידועים בתוך הרשת ולנתח את נתוני המופע/אמפליטודה עבור תדרים מרובים. שבב DDS יחיד מספק את כל פונקציית הפקת התדרים, ונותן למשתמש גמישות גדולה בבקרה הדיגיטלית של התדרים הדרושים לבקרת הרשת. מאחר שלא דרושים רכיבים חיצוניים, המשתמש צריך רק את היכולת לכתוב אל ה-DDS דרך ממשק ה-SPI שלו. מופע המוצא של ה-DDS ניתן לבקרה טיפוסית ברזולוציה של 10 ביט עד 14 ביט, הנותן רזולוציית מופע מיתכנתת של0.1 > מעלה.
במערכת מאיור 2, השבב AD9834 DDS משמש לגירוי האנלוגי של המערכת. הוא מוזן על-ידי מתנד גביש של 50 מגה-הרץ. רזולוציית התדר של ה-AD9834 היא 28 ביט, דבר המאפשר בקרת תדר עד כדי 0.2 הרץ. אמפליטודת המוצא של ה-DDS מבוקרת על-ידי נגד חיצוני מוארק; ודרגת שבח חיצונית מזינה את הרשת.
המוצא, המועמס על-ידי הנגד RL, מזין מסנן RC מעביר תדר נמוך, אשר מגביל בתחום את האות ומסנן החוצה את תדר השעון, ההדמיות והתדרים היותר גבוהים. מגבר חוצץ מזין את הרשת, המוצגת כאן על-ידי מעגל LRC. אות הייחוס מחובר לערוץ 1 של ADC דו-ערוצי, דוגם בו-זמנית (דוגמת ה-ADC הכפול AD78666, 12 ביט, 1-MSPS) ואות ההיענות מועבר לערוץ 1 של ה-ADC.
מעבד אות דיגיטלי, המשמש כבקר המערכת, מבקר את הדגימה של ה-DDS ושל ה-ADC. ה-DSP מטפל בדרישות העיבוד של המערכת על-ידי אריתמטיקה פשוטה, או על-ידי FFT, DFT או אלגוריתמים קנייניים, והוא יכול גם לבקר כל כיול דרוש של האמפליטודה או המופע של המערכת.
יישומים אחרים
ניתן להשתמש בגישה דומה ביישומים אחרים רבים, תוך שינויים התלויים בפיזיקה ובמעגלים שבשימוש. דוגמאות כוללות הספקת סריקות תדר לשימוש בבדיקות של LVDTs (linear variable differential transformers); חישה מקרוב המשתמשת בחיישן קיבולי; גילוי מתכות בעזרת סלילים מאוזנים; בדיקת דם בעזרת חיישן כימי; מדידת ספיקה בעזרת חיישנים אולטרא-סוניים; ובקרת עצמים אלקטרונית (EAS) – למניעת גניבה מחנויות- על-ידי תגים רגישים ל-RF.
DDS בתקשורת
לרוב, כאשר נבחן תכנון של מסנתז תדר חדש, נרשמו שתי גישות בסיסיות: עניבה נעולת-מופע (phase-locked loop – PLL) וסינתזה דיגיטלית ישירה (direct digital synthesis – DDS). הבחירה איננה תמיד ברורה; לעתים המתכנן צריך לעשות פשרות או לתכנן מעגלים נוספים כדי לפצות על חולשות של הטכניקה שנבחרה.
אולם, עתה כאשר גם מעגלי PLL וגם DDS זמינים כרכיבים זולים, יש תועלת בתכנון מעגל היברידי המשלב את שתי הטכניקות, ובכך מבטל את כל הפשרות. המתכנן יכול לנצל את שתי השיטות כדי להשיג פיתרון כולל העולה על התכנונים הפרטניים של ה- PLL או ה-DDS. אנחנו נדון על הגישות במונחים של:
•רזולוציית תדר עדינה
•פעולת מיתוג מהירה
•זמן השתקעות (settling) מהיר
•רוחב פס רחב
•הספק נמוך מאוד
•רעש מופע ורעש כוזב (spurious) נמוך
שני מסנתזי תדר היברידיים PLL/DDS שונים ידונו כאן –DDS המספק ייחוס בעל כוונון עדין עבור PLL, ו-PLL בעל היסט פנימי מתדר של מתנד מקומי המופק על-ידי DDS.
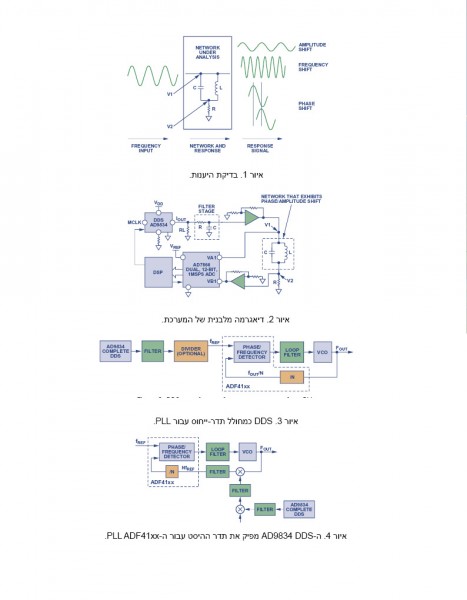
ייחוס בעל כוונון עדין עבור PLL: איור 3 מראה מסנתז תדר PLL בעל תדר ייחוס המופק על-ידי המוצא המסונן של DDS. על-ידי שימוש בפיתרון היברידי, רזולוציית הכוונון של ה-DDS יכולה לשפר את הכוונוניות של המערכת הכוללת, שהיא ברמה בלתי אפשרית בעזרת PLL בלבד.
בדוגמה זו, ה-PLL מורכב ממסנתז-תדר integer-N ADF41067, עם מסנן לולאה חיצוני ו-VCO. תצורה זו מאפשרת למתכנן לבחור VCO אשר ימלא את תנאי התדר ומסנן לולאה שיענה לצורכי היישום. הייחוס מופק על-ידי DDS AD98348, ואחריו מסנן ומחלק מותאם אופציונלי, להנמכת הרעש והתדרים הכוזבים.
ה-DDS, עם מילת הכיוונון של 28 ביט שלו, מאפשר לתדר הייחוס כוונון מאוד מדויק, הנותן כוונון עדין של תדר המוצא הרבה יותר בנוחות מאשר תוך שימוש ב-PLL fractional-N.
לדוגמה, אם ל-VCO תחום תדרים של 100 מגה-הרץ עד 500 מגה-הרץ, ומוצא ה-DDS הוא בקרבת 5 מגה-הרץ, התחום של N הוא בין 20 ל-100. כל צעד של N גורם לצעד של 5 מגה-הרץ בתדר המוצא (100 מגה-הרץ, 105 מגה-הרץ, 110 מגה-הרץ וכד’). אולם מוצא ה-AD9834 ניתן לכיוון בהפרשים קטנים פשוט על-ידי כיוונון המספר-על-בסיס 16 הנכתב באוגר התדר. ה-AD9834 ניתן לכוונון בקפיצות קטנות של עד 0.2 הרץ עם תדר שעון של 50 מגה-הרץ. כך נוצר כוונון עדין ביותר של ה-PLL/DDS ההיברידי.
בצורה אידיאלית, לייחוס צריך להיות רעש מופע ותדרים כוזבים נמוכים. למוצא ה-DDS אכן יש רעש מופע נמוך, אך אל תוכן הכוזבים שלו יש לפנות בתדרים אחדים. הכוזבים נוצרו בגין פילוג לאחר צובר המופע, וכתוצאה תוכן הכוזבים עולה בשילובים מסוימים של דגימה/תדר מוצא. את הכוזבים האלה ניתן למזער על-ידי סינון נוסף ובחירה קפדנית של תכנית הדגימה.
אם מהירות המיתוג איננה חשובה, ניתן להצר מאוד את רוחב הפס של ה-PLL כדי למנוע כוזבי ייחוס; אזי רעש המופע והכוזבים מוגבלים לאלה של ה-VCO. אם ה-VCO נקי, זו יכולה להיות הדרך הפשוטה ביותר להשיג מסנתז בעל רוחב-פס רחב, רזולוציה גבוהה, רעש כוזבים טוב, ממדים קטנים והספק נמוך במיוחד, אם כי עם מיתוג איטי בין התדרים.
כדי ליהנות מיכולת המיתוג המהירה של ה-DDS, כמו גם הרזולוציה הגבוהה שלו, דרוש רוחב-פס לולאה רחב יותר של ה-PLL – וכך המסנן והמחלק האופציונלי חשובים להשגת רעש וכוזבים נמוכים. שים לב שה-PLL מגדיל את האמפליטודה של תדרי הכזב, אך לא את היסט התדר שלהם מהייחוס. לכן המסנן באיור 3 חיוני כדי להגביל את תדרי הכזב והרעש המופקים ב-DDS לרוחב פס צר.
לאחר הכפלת התדר ב-N, הרעש ותדרי הכזב יגדלו ב-20 log(N), אבל רק בתוך רוחב הפס של המסנן. לבסוף, בחירת רוחב הפס והתדר המרכזי של המסנן היא פשרה בין מהירות המיתוג, ביצועי הרעש והצורך בכיסוי תדר רציף.
PLL עם תדר היסט פנימי מופק על-ידי DDS
איור 4 מראה מסנתז PLL עם תדר היסט פנימי מופק על-ידי DDS.
מעגל זה משתמש בתדר DSS מכוון בקפידה כדי לאפנן תדר של מתנד מקומי, ויוצר תדר סכום/הפרש אשר, לאחר סינון, מאפנן את תדר הייחוס, ויוצר תדר מוצא,
fOUT=NfREF±(fLO±fOFFSET)
הדבר דומה לתכנון מסנתז רב-לולאות, מלבד שלולאות ה-PLL בעלות הצעד העדין בתדר מוחלפות ב-DDS יחיד. רזולוציית התדר העדין של ה-DDS במסנתז היברידי זה יכולה לספק רזולוציית תדר טובה יותר מאשר PLL עם הרבה לולאות.
ה-PLL מספק את הצעדים הגסים, וכמו קודם, לתדר מוצא ה-PLL (עם המתנד המקומי) אותה רזולוציה בסיסית כמו תדר ייחוס המבוא, fREF. ה-DDS מספק צעדים עדינים בין כל אחד מהצעדים הגסים, כך שגודל צעד המוצא הסופי הוא זה של ה-DDS. בשימוש ב-AD9834 עם שעון מרכזי של 50 מגה-הרץ, גודל צעד של 0.2 הרץ אפשרי.
DDS בקידוד נתונים
מאחר שהתקני DDS מקלים על כוונון התדר והמופע, הם שימושים במיוחד בקידוד נתונים עבור אפנון מופע ותדר על גל נושא. להלן שני יישומים קשורים החוזרים אל הימים הראשונים של רדיו-טלגרפיה.
קידוד FSK: מפתוח בהיסט תדר frequency-shift keying – FSK)) בינרי הוא אחד הצורות הפשוטות ביותר של קידוד נתונים. הנתונים מועברים על-ידי הסטת התדר של גל נושא רציף אל אחד או אחר משני תדרים דיסקרטיים (פעולה בינרית). תדר אחד (f1) מסומן כתדר “סימן” (אחד בינרי) והשני (f0) כתדר ה”מרווח” אפס בינרי). איור 5 מראה את הקשר בין הנתונים והאות המשודר.
סכימת הקידוד ממומשת בקלות על-ידי שימוש ב-DDS. מילת כיוונון התדר של ה-DDS המייצגת את תדרי המוצא משתנה כדי להפיק f0 ו-f1 בצורה סינכרונית עם תבנית ה-1 וה-0 שיש לשדר. המשתמש מתכנת את מילות הכוונון המתאימות לתדרים הנבחרים לתוך ההתקן לפני השידור. במקרה של ה-AD9834, שני אוגרי תדרים זמינים בנקל עבור קידוד ה-FSK. פין מיוחד בהתקן (FSELECT) משמש לבחירת אוגר התדרים המתאים למילת הכוונון הנכונה. הדיאגרמה המלבנית באיור 6 מציגה את מימוש קידוד ה-FSK.
קידוד PSK: מפתוח בהיסט מופע (phase-shift keying- PSK) היא צורה פשוטה נוספת של קידוד נתונים. ב-PSK, בעוד תדר הגל הנושא נשאר קבוע, המופע של האות המשודר משתנה כדי להעביר את המידע.
קיימות סכמות שונות שניתן להשתמש בהן כדי לבצע PSK. השיטה הפשוטה ביותר, המשתמשת רק בשני מופעי אות 00 ו-1800 ידועה לרוב כ-PSK בינרי .(BPSK) 00 מתאים ל-Logic 1, ו-1800 מתאים ל-Logic 0. המצב של כל ביט נקבע על-פי המצב של הביט הקודם לו. אם מופע הגל אינו משתנה, מצב האות נשאר כפי שהיה (נמוך או גבוה). אם מופע הגל מתהפך, כלומר משתנה ב-1800, מצב האות משתנה (מנמוך לגבוה או מגבוה לנמוך).
קידוד PSK ממומש בקלות בעזרת התקני ה-DDS. לרוב ההתקנים יש אוגר מבוא נפרד (אוגר מופע) שניתן לטעון עם הערך של המופע. ערך זה מוסף ישירות למופע הגל הנושא מבלי לשנות את התדר שלו. שינוי תוכן האוגר מאפנן את מופע הגל הנושא (ובכך מפיק אות מוצא PSK). עבור יישומים הדורשים אפנון מהיר, ה-AD9834 מאפשר לאוגרי המופע הנטענים להיבחר תוך שימוש בפין מבוא מיוחד (PSELECT); שינוי בפין זה מאפנן את הגל הנושא כנדרש.
אפשר להשתמש בזוויות מופע אחרות. צורות יותר מורכבות של PSK משתמשות בארבעה או שמונה מופעים שונים. דבר זה מאפשר לנתונים הבינריים להיות מועברים בקצב מהיר יותר בשינוי מופע מאשר אפשרי עם אפנון BPSK. לדוגמה, באפנון בעל ארבעה מופעים, quadrature PSK (QPSK), זוויות המופע האפשריות הן 00, +900, -900 ו-1800; כל היסט מופע יכול לייצג שני ביטים של נתונים. ה-AD9830,9, AD9831,10, AD9832,11 ו-AD983512 מספקים ארבעה אוגרי מופע כדי לאפשר לסכמות אפנון מופע מורכבות להיות ממומשות על-ידי עדכון רציף של היסטי מופע שונים אל האוגרים.
יישומי מצוף: DDS שימושי בתקשורת מצופים. מצוף הוא התקן המותקן בתוך מים והקולט קולות סביבה באוקיאנוס. יישומים מקובלים עבור מצופים הם בגילוי, איתור, זיהוי ועקיבה של אירועים סיסמיים ומטרות מתחת לפני המים כגון צוללות ולווייתנים. מערכי מצופים יכולים לשמש לקביעת המיקום, המהירות וכיוון התנועה של המטרה.
ארבעה רכיבים עיקריים למערכת מצוף: מצוף, מקמ”ש רדיו, סוללה והידרופון. ההידרופון הוא חיישן תת-מימי הממיר גלי לחץ קוליים למתחים חשמליים המוגברים ונשלחים למצוף הצף. אות הרדיו נקלט על-ידי אנטנה ומקלט רדיו, לרוב במטוס או בספינה.
מצופים אקטיביים משדרים גלי קול, המוחזרים על-ידי עצמים. ניתן לקבוע את המרחק והכיוון אל העצם מתוך האות המוחזר. מתמר (transducer) משמש להכנסת הגל האקוסטי למים ולתמרון בהדים החוזרים, המוגברים לאחר מכן עבור שידור רדיו ב-VHF. מצופים פסיביים אינם משדרים כל קול; הם רק עומדים במקום ומאזינים לקולות הבאים. בשני המקרים, הנתונים משודרים בחזרה לספינה או למטוס, לעתים קרובות על-ידי תקשורת בספקטרום מורחב, בו התדרים מוקפצים כדי שיהיו דומים לרעש רקע. DDS מספק לעתים קרובות את קפיצות התדר בדרגות השידור והקליטה.
ה-AD9834 הוא אידיאלי כמקור תדר גמיש בדרגת השידור של המצוף (איור 7). התדרים המקובלים המשודרים נעים בין 136 מגה-הרץ ל-174 מגה-הרץ.
סכימה מלבנית של מקלט טיפוסי, עבור איתור מיקום GPS, מוצגת באיור 8.
דרגת הקליטה של מצוף מורכבת מאנטנת GPS, מגבר בעל רעש נמוך ודרגת המרה לתדר נמוך בקצה הסופי. ההמרה לתדר נמוך מוזנת על-ידי ה-DDS. האות מהקצה הסופי עובר דגימה ודיגיטיזציה, וזרם הנתונים הנוצר (המכיל את נתוני הספקטרום המורחב של כל לווייני ה-GPS בטווח האנטנה) מועבר למתאמים לצורכי עיבוד הספקטרום המורחב. המוצא של תהליך התאום מומר על-ידי ה-CPU כדי לספק את הקואורדינטות של המצוף.
ה-DDS מציע יתרונות עבור המשדר והמקלט כאחד, בשל יכולות הכיוונון העדין שלו. ההספק הנמוך (25 מילי-ואט) והעלות הנמוכה של ה-AD9833/AD9834 יוצרים פיתרון אידיאלי עבור יישומים מוזני-סוללה, מתכלים, דוגמת המצופים.
זיהוי ערוץ סיב אופטי: לתקשורת המשתמשת בגלי-אור על-גבי כבלים עשויים מסיבים אופטיים רוחב-פס ויכולת מוגדלים בהרבה לעומת אלה הקיימים בטכנולוגיה של ליבת-נחושת. היכולת מורחבת עוד יותר על-ידי שימוש בערוצים המרובים הזמינים באמצעות ה-wavelength division multiplexing (WDM) בעלות נמוכה יחסית.
WDM כולל שילוב של אורכי-גל (צבעים) נפרדים מתזרימי נתוני המבוא, ושידור הסכום של הערוצים הללו (אור “לבן”) דרך סיב אופטי יחיד. ניתן לערב פרוטוקולים שונים באותו הערוץ. בקצה הקולט, האור מופרד למרכיביו, ומפוענח.
אם כי כל האותות משודרים בו-זמנית, רצוי לזהות מאיזה ערוץ נובע האות. דרך אחת להבדיל בין הערוצים היא להוסיף אות מחוון (pilot) בעל פרמטרים הניתנים לזיהוי (כגון אמפליטודה, תדר, מופע וכד’) לנתונים הדיגיטליים של כל ערוץ. במשדרים אופטיים אות המחוון מוסף על-ידי שינוי הזרם העובר דרך דיודת הלייזר. איור 9 מראה כיצד נעשה הדבר.
איור 9. DDS ביישום תקשורת סיב אופטי.
ה-ADN2847 המזין דיודת-לייזר פועל בכל קצב בין 50 Mbps ו-3.3 Gbps. זרם קולט חיצוני ב-IDTONE, המסופק לצורכי זיהוי הסיב ב-WDM, מאפנן את רמת ה-אחד האופטי בתחום אפשרי של 2% מה-Imod המזערי עד 10% מה-Imod המרבי. ה-AD9834 מפיק את צורת הגל של האפנון ומכוון את הזרם היוצא מה-IDTONE בעזרת בקרה על המתח על-פני נגד של 500 אוהם. זרם dc ב-IMMON, המשקף את זרם האפנון, משמש בלולאת משוב כדי לבקר את רמת המוצא של ה-AD9834 דרך הפין RSET שלו.
סיכום
סינתזה דיגיטלית ישירה, המפיקה צורות-גל אנלוגיות בעלות מופע ותדר המתכוונים דיגיטלית, היא שימושית במגוון רחב של יישומים בבדיקות, מדידות ותקשורת. התקני DDS בעלי מעגלים משולבים הם קומפקטיים, דורשים הספק ושטח קטנים, הם זולים וקל להשתמש בהם.