





עד כמה נמוך אפשר לרדת? שיפור יכולות הספק נמוך של מיקרובקר מבלי לחרוג מהמטרות של אורך חיי הסוללה – או לא, הנה עוד מאמר על צריכת אנרגיה נמוכה שמדגיש מצב כוח בתצורה של מיקרובקר מסוים ומציג חישובי חיי סוללה המבוססים על אלפיות האמפרים לשעה! ובכן, אין ספק שההיבטים הללו בתכנון צריכת אנרגיה נמוכה הנם חשובים, אבל קיימים היבטים נוספים בתכנון משובץ שיכולים להוביל להארכה משמעותית במחזור החיים השמיש של מוצר. יצרני התקנים רפואיים צריכים לקחת בחשבון מספר קווים מנחים לבניית מערכת במטרה לשפר את התוכניות שלהם, עם מעט מאוד השפעה על חיי הסוללה, אם בכלל. עבור התקנים רפואיים רבים המיקרובקר הוא הרכיב המרכזי שמבצע את רוב מטלות היישום, אם לא את כולן. מיקרובקר יכול להיות התורם העיקרי לצריכת ההספק הכוללת של ההתקן, וזו הסיבה שחשוב מאוד לקחת בחשבון את המאפיינים של המיקרובקר, ולהשתמש בהם בכדי לנסות להשיג את היעדים בכל מה שקשור לאורך חיי הסוללה. יכולות מסוימות, ולא משנה אם המכשיר נמצא על המדף, במצב המתנה או מבצע מדידות, יכולות להשפיע על אורך חיי הסוללה וכך לקבוע את ערך המוצר עבור משתמש הקצה. הדוגמאות להלן ניתנות לשימוש כקווים מנחים עבור שלב התכנון של התקן רפואי, והן יכולות לסייע בבחירת המיקרובקר.
 במקביל לכך שהתקנים רפואיים זוכים לאחרונה להוספת מאפיינים, כמו קישוריות ותכונות ממשק אדם-מכונה, הזיכרון ויכולות הקלט-פלט של המיקרובקר צריכים לגדול בהתאם. כיום, מיקרובקרים עם חצי מגה-בייט זיכרון הבזק ועם יותר מ-100 קוויי קלט/פלט הופכים לשכיחים בפורטפוליו של יצרניות מוליכים למחצה. מגמה זו מייצגת מספר אתגרים שעומדים בפני יצרניות מוליכים למחצה, וזאת מכיוון שמטרות צריכת ההספק והעלות אינן משתנות באותה מהירות כמו גודל הזיכרון של המיקרובקר. בנוגע לצריכת הספק, הבעיה עם זיכרון גדול יותר ועם מספר רב יותר של חיבורי קלט/פלט היא זליגה. לכל תא סיבית זיכרון ולכל רכיב קלט/פלט יש זרם זליגה. ככל שהזיכרון ומספר חיבורי הקלט/פלט גדולים יותר, כך הזליגה תהיה גדולה יותר.
במקביל לכך שהתקנים רפואיים זוכים לאחרונה להוספת מאפיינים, כמו קישוריות ותכונות ממשק אדם-מכונה, הזיכרון ויכולות הקלט-פלט של המיקרובקר צריכים לגדול בהתאם. כיום, מיקרובקרים עם חצי מגה-בייט זיכרון הבזק ועם יותר מ-100 קוויי קלט/פלט הופכים לשכיחים בפורטפוליו של יצרניות מוליכים למחצה. מגמה זו מייצגת מספר אתגרים שעומדים בפני יצרניות מוליכים למחצה, וזאת מכיוון שמטרות צריכת ההספק והעלות אינן משתנות באותה מהירות כמו גודל הזיכרון של המיקרובקר. בנוגע לצריכת הספק, הבעיה עם זיכרון גדול יותר ועם מספר רב יותר של חיבורי קלט/פלט היא זליגה. לכל תא סיבית זיכרון ולכל רכיב קלט/פלט יש זרם זליגה. ככל שהזיכרון ומספר חיבורי הקלט/פלט גדולים יותר, כך הזליגה תהיה גדולה יותר.
דוגמה אחת להשפעה של זליגה על אורך חיי הסוללה היא התייחסות לתרחיש חיי המדף של התקן. זמן האחסון והטמפרטורות יכולות להיות שונות מהתקן להתקן, אבל שנת חיי מדף אחת עם תנאי טמפרטורה מורחבים אינם דבר נדיר. בגלל הזליגה, אפילו תפקודיות מוגבלת מאוד, כמו שעון זמן אמת, יכולה להוביל להפחתה של 20% בקיבולת של תא סוללה בצורת מטבע, שנובעת מהתמיכה בחיי המדף. מכיוון שזרמי הזליגה מושפעים באופן מעריכי מטמפרטורה, ישנם מספר תרחישים בהם ההשפעה יכולה להוביל לחוויית משתמש עלובה מאוד עבור משתמש הקצה.
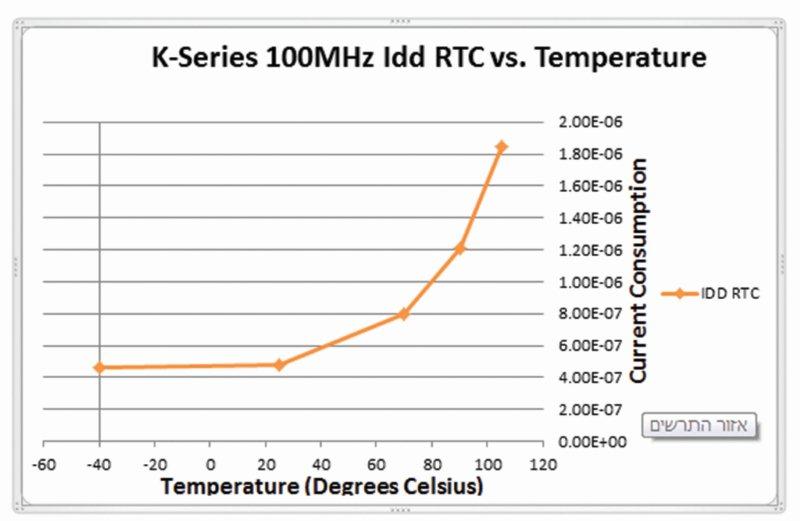
בכדי להתייחס לבעיית חיי המדף, מתחם מתח נפרד מיושם במיקרובקרים כמו התקני Kinetis K-Series. מתחם מתח נפרד זה משמש לאספקת החשמל רק לחלק מתכונות המיקרובקר, ובמיוחד המתנד הגבישי והאוגרים של שעון זמן האמת הנדרשים לביצוע פעולת שמירת הזמן. התוצאה הסופית היא שרק חלק קטן מהלוגיקה וחיבורי הקלט/פלט של המיקרובקר מקבלים חשמל. מכיוון שפחות חיבורי קלט/פלט וזיכרון מקבלים חשמל, למתחם המתח של שעון זמן האמת יש פרופיל זליגה מצוין לעומת טמפרטורה כמוצב בתרשים להלן. ב-105 מעלות הזליגה הטיפוסית עבור מתחם כוח של שעון זמן אמת היא 2 מיקרו-אמפר בלבד.
בכדי להפיק את המרב מתכונה זו של המיקרובקר, יש למנוע את אספקת הכוח לבקר לאורך חיי המדף שלו. מניעת החשמל מהמיקרובקר ניתנת ליישום על ידי הוספת מתג דו מיקומי כדי לאפשר למשתמש לקבוע מתי כל הבקר יקבל חשמל. אפשרות ידידותית יותר למשתמש יכולה להיות מתג שהוא כפתור לחיצה שמחובר לטרנזיסטור הכוח. לאחר הלחיצה על כפתור הלחיצה, ניתן להשתמש בבקר כדי לבטל את מתג השער המבודד כדי שכל המיקרובקר ימשיך לקבל מאותו רגע חשמל. בהתקנים רפואיים מסוימים, בהם לא ניתן להשתמש במתגים או בכפתורים, ניתן להשתמש בחיישן אינפרא-אדום או חיישן מגנטי במקום במתג לחיצה. החיישן יוסיף לצריכת הכוח בזמן מצב המדף, אבל הפיצוי, כאמור, בא בזכות התועלת שמשיגים ביצירת בהשגת מתחם מתח נפרד לשעון זמן האמת.
שימוש במתחם מתח נפרד עבור שעון זמן אמת מבטיח שההתקן הרפואי יהיה מוכן לשימוש עם תאריך שמוגדר מראש שמצריך מעט מאוד מעורבות מצד המשתמש, אם בכלל. עבור התקנים רבים מדובר בדרישה קריטית ושימוש בתכונה הזו של המיקרובקר חוסכת, כאמור, בחיי הסוללה, אבל גם מעשירה את חוויית השימוש. סוג זה של תפקודיות ניתן ליישם על ידי שימוש במעגל משולב חיצוני, אבל השימוש במיקרובקר עם תכונה זו ממטב את עלות החומרים וכן חוסך מקום על הלוח. כשמתכננים התקן רפואי, יש לקחת בחשבון גם תרחישים קיצוניים יותר כמו טמפרטורות אחסון של 50 מעלות צלזיוס ומעלה. כך שמעקב אחר הקו המנחה הזה יבטיח שרק כמות מזערית של חיי סוללה תבוזבז כדי לתמוך בתצורה של זמן מדף וטמפרטורה סטנדרטיים.
ברגע שהמוצר יורד מהמדף, לזליגה יכולה להמשיך ולהוות השפעה משמעותית על אורך חיי הסוללה. זה יהיה תלוי בכמות הזמן שההתקן הרפואי יימצא במצב המתנה כנגד כמות הזמן שהוא יהיה פעיל ותפקודי. לזליגה יש את ההשפעה הרבה ביותר עבור התקנים שנמצאים רוב הזמן במצב המתנה, וזה המקרה עבור התקנים רפואיים רבים שפועלים בצריכת הספק נמוכה. באופן כללי, התקנים שפועלים בצריכת הספק נמוכה צריכים להיות במצב פעיל במשך זמן קצר ככל האפשר. כשמתכננים מצבי המתנה של התקן רפואי, יש לקחת בחשבון משתנה קריטי – בנוסף לזמן המתנה שלו – והוא זמן התגובה. אם להתקן הרפואי יכולים להיות זמני המתנה ארוכים מאוד (דקה או יותר) ואין דרישות זמן תגובה מיוחדות (אלפית השנייה ומעלה מכך), אז ניתן להחזיר את ההתקן בחזרה למצב מדף. תכונה נוספת של התקני Kinetis K-Series, מעבר למתחם המתח הנפרד לשעון זמן אמת, הוא פין RTC_WAKEUP שיגרום להעברת אות בעוצמה נמוכה כשמתרחשת אתרעה מוגדרת מראש. על ידי שימוש באות האתראה הזה יחד עם טרנזיסטור מבודד שער חיצוני, ניתן להפעיל את המיקרובקר במרווח האתראה ואז לקבוע האם נדרש לבצע פעולות נוספות.
עבור מקרים בהם זמנן התגובה וזמני ההמתנה קצרים יותר (זמן המתנה קצר נמצא בטוח השנייה הבודדת, וזמן תגובה קצר נמצא בטווח של 100 מיקרו-שניות), יש ליישם אסטרטגיה שונה בה משתמשים במצב הספק הנמוך של הבקר. מיקרובקר מסדרת Kinetis K-Series מיישם מספר מצבי "עצירה בזרם זליגה נמוך מאוד" (Very Low Leakage Stop) שבאופן פנימי מכבים כמויות שונות של זיכרון RAM נדיף. כמות הזיכרון שמכבים יכולה לנוע בין 64 בייטים ועד 128 קילו-בייטים עבור Kinetis K-Series. כדי להבטיח את דיוקן הזליגה הטוב ביותר, יש לכתוב תוכנה יישומית שדורשת כמות זיכרון מזערית כדי שניתן יהיה להשתמש במצב ההספק המיטבי.
עבור שימושים עם זמני המתנה קצרים, שזקוקים לזמן תגובה מהיר מאוד, יש להשתמש במצב ההספק הנמוך של המיקרובקר עם לוגיקה פעילה. התאוששות מפסיקה של ציוד היקפי תאפשר להתקן להתעורר ולבצע במהירות את התפקוד המבוקש, ואז לחזור למצב המתנה בכדי לחסוך חשמל. הקו המנחה לשימוש הזה הוא להוציא את המרב מהלוגיקה הפעילה במיקרובקר. את זאת ניתן לעשות על ידי כך שמקפידים להגדיר מראש את הציוד ההיקפי לפני שנכנסים למצב המתנה, וכן שמשתני התוכנה מוכנים לעיבוד ושקושחת היישום ממוטבת לזמן הביצוע.
הטבלה להלן מספקת קווים מנחים כלליים לתרחישים שונים שיובילו לצריכת הספק הממוצעת הנמוכה ביותר עבור במיקרובקרים כמו התקני Kinetis K-Series. ביישומים רבים זמן ההמתנה והזמן התגובה יכולים להשתנות בין מקרים מסוימים, לכן אפשר להשתמש בשילוב של הקווים המנחים להלן.
כשמבצעים באופן פעיל מדידות או דרישות יישום אחרות, האסטרטגיה עבור תכנון הספק נמוך הוא לבצע את המטלה בעזרת כמות האנרגיה הנמוכה ביותר שאפשר. ההתייחסות לדרישה הזו מבוצעת בהתאם לתפקודיות המיקרובקר במצבי הספק נמוך. לדוגמה, אם אנו ממשיכים את הנושא של מצבי ההמתנה, התקני ה-Kinetis K-Series מכילים ציוד חישת מגע מוכלל שיכול להיות פעיל במצבי עצירה בזרם זליגה נמוך מאוד. התקן שמצויד ביכולת הזו עבור מצבי הספק הנמוכים ביותר שלו יכול ליישם ממשק מגע בעלות כוח וחומרים מזערית. פתרונות חלופיים דורשים מהבקר לקבל באופן פעיל אותות מפיני קלט/פלט.
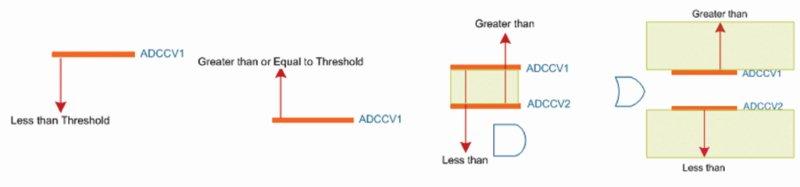
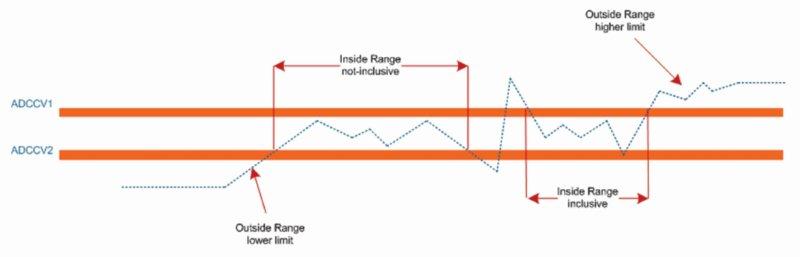
אם מתייחסים למדידות אנלוגיות, הממיר האנלוגי לדיגיטלי עבור התקני Kinetis מכיל מקור שעון עצמאי בו ניתן להשתמש כדי לבצע מדידות במצבי המתנה. בנוסף, הממיר מצויד בפונקצית השוואה שיכולה להשוות את קריאת הממיר לטווחים מוגדרים מראש ולבדוק מספר תנאים כולל פחות מסף, בתוך הטווח ומחוץ לטווח. הערכים הדיגיטליים מוצבים באוגרים ADCCV1 ו-ADCCV2 ומושווים כנגד ההמרות מהאנלוגי לדיגיטלי.
עבור יישומים שדורשים עמידה בסף מדידה מסוים לפני איסוף נתונים, ניתן להשתמש בתפקודיות הזו כדי להקטין את צריכת הכוח מכיוון שהתפקדויות של מצב ה-ADC STOP של ה-Kinetis מאפשרת לעצור את רוב הלוגיקה של המיקרובקר בעוד שרק ציוד ההמרה מאנלוגי לדיגיטלי מבצע את איסוף הנתונים ואת ההשוואה האוטומטית. ההתקן אינו יוצא ממצב העצירה עד שעומדים ברמת הסף הנדרשת, וזאת כדי לחסוך באנרגיה של הסוללה.
התפקודיות של הציוד ההיקפי במצבי הספק נמוך הוא מרכיב חשוב שמועיל לצריכת ההספק הנמוכה של הבקר. בפלטפורמות עתידיות, כגון Kinetis L-Series עליה הוכרז לאחרונה, פריסקייל הוסיפה מספר שיפורים בכדי לתמוך בתפקודיות של התקנים חיצוניים עם צריכת הספק נמוכה. כמה מהשיפורים הללו כוללים תפקודיות משדר מקלט אסינכרוני אוניברסאלי (UART) במצבי עצירה, לכידת קלט של שעון עצר, השוואת תפוקה ו-PWM במצבי עצירה וכן גישה אסינכרונית ישירה לזיכרון במצבי עצירה. בעבודה יחד עם תפקודיות ההמרה האנלוגית לדיגיטלית, שהוזכרה קודם לכן, התקן המבוסס על פלטפורמת Kinetis L-Series יכול לתמוך בשימושים בהם נתונים נאגרים באמצעות הממיר האנלוגי דיגיטלי ואז מועברים באמצעות ה-UART על ידי שימוש בפעולת גישה לזיכרון ישירה אסינכרונית. התוצאה תהיה שימושים עם זמני פעולה במצב פעיל מלא קצרים אף יותר. Kinetis L-Series כוללת גם את ליבת ה- ARM Cortex-M0+ עליה הוכרז לאחרונה, וזו פלטפורמה שתתמוך ביכולות עיבוד יעילות ביותר עם יכולת הכפלה של 32 סיביות במחזור יחיד ועם יציאת קלט/פלט עם זמן אחזור נמוך.
תמיכה בתכונות המיקרובקר כמו מתחם המתח הנפרד לשעון זמן אמת, מספר מצבי הספק עם החזקת RAM ניתנת להגדרה ותפקודיות ציוד היקפי במצבי עצירה, מייצגת אתגרי תכנון ייחודי ועלות ליצרנית מוליכים למחצה. אבל התמורה שניתן להשיג מתעלה מעל האתגרים הללו, וניתן להשיגה על ידי שימוש בתכונות. חיי סוללה ארוכים יותר יכולים להוביל ליצירת נאמנות של הלקוחות להתקן הרפואי. במקרים מסוימים צריכת הספק ממוצעת נמוכה יותר יכולה להוביל להתקנים בקנה מידה קטן יותר שנוחים יותר לשימוש מבחינת המטופל. תכונות ידידותיות למשתמש כמו היכולת להימנע מהצורך לקבוע את הזמן ואת התאריך להתקן יכולות להיות אלו שיבדילו את היצרניות מהמתחרות. אם תתחשבו בכמה קווים מנחים בזמן התכנון, תוכלו לחלץ את הערך המלא של המיקרובקר המתאים ולהשתמש בו בתכנון הבא שלכם.
Yan Vainter, Freescale
