



רובוטים תעשייתיים ומכונות חווים לעיתים קרובות מרעידות המשפיעות על בקרת המיקום וגורמות לחוסר יציבות מערכתי. רעידות נגרמות בדרך כלל על ידי תדרי תהודה וכוחות לא-ליניאריים הנוצרים במפרקי הרובוט או בחיבורי המכונות. הדרישה הגוברת למהירויות גבוהות והמבנה הקל של המכונות המודרניות מובילים גם לנטייה מוגברת לתנודות. המבנה המכאני של רובוט גנטרי (gantry), לדוגמה, עשוי להיות בעל תכנון פחות קשיח בשל מגבלות משקל ועלות. ביישומים כאלה בעלי עומסים תלויים, החיבורים הגמישים שבין יחידת הקצה לבין צירי הרובוט עלולים לגרום למכונה לרעוד באופן מוגזם בכל עצירה או בכל היפוך כיוון התנועה. כדי לשמור על דיוק, על המכונה לעצור בכל פעם עד להפסקת הרעידות. אולם כדי להשיג תפוקה מרבית של המערכת על זמני ההתייצבות להיות קצרים ככל האפשר.
בקרת שיכוך הרעידות המתקדמת שפותחה על ידי סרווטרוניקס והמיושמת בסדרת בקרי הסרוו CDHD מאפשרת לייצב במהירות מערכות שבהן מופיעות רעידות בתדירות קבועה. אלגוריתמי בקרה קנייניים אלו מפחיתים את שגיאת העקיבה ומקצרים את זמן ההתייצבות של העומס.
פונקציית שיכוך הרעידות פועלת בחוג סגור, מזהה תנודות עם התרחשותן ומשככת אותן באופן מידי. באמצעות שיכוך פעיל של תנודות, בקרי ההינע מפחיתים באופן משמעותי את הזמן הנדרש לעומס בקצה להתייצב בנקודת היעד. אף על פי ששגיאת העקיבה שיראה האנקודר עלולה להיות גדולה יותר, הביצועים הכלליים של המערכת ישתפרו במידה משמעותית בנקודת הקצה.
תהליך שיכוך הרעידות
תהליך שיכוך הרעידות מתחלק לארבעה שלבים, כמוצג בתמונה 3.
שלב 1:
הפרעות במערכת מזוהות באמצעות משתני בקרה כגון שגיאת מיקום וצריכת זרם, בצורת קלט. ערך ההפרעה מחושב.
שלב 2:
ערך ההפרעה נשלח דרך מעביר פס צר (narrow band pass filter) כדי לבחור את ההפרעות המופיעות בשל תנודות המערכת. התדירות המרכזית ורוחב מעביר הפס נקבעים על ידי שני פרמטרים.
שלב 3:
פלט מתקן מחושב.
שלב 4:
הפלט המתקן נוסף למשתני הבקרה באמצעות פרמטר הגבר שיכוך (damping gain).
במקרה של רעידות בתדירויות קבועות בקרי ה-CDHD של סרווטרוניקס נסמכים על מעבירי תדרים נמוכים (low pass filters) ועל מסננים חוסמי פס (notch filters). פונקציית שיכוך הרעידות הקניינית פותחה כדי לשלוט ברעידות הנגרמות על ידי תדירויות תהודה נמוכות, בטווח שבין 5 הרץ לבין 400 הרץ. הפונקציה מסוגלת לשכך גם מערכות שבהן מתרחשות מספר תהודות נבדלות.
שיכוך הרעידות מיושם באופן אוטומטי באמצעות הליך הכיול האוטומטי (autotuning) של בקר ההינע. תחילה תדירות התנודה נמדדת ומתבצע חישוב של תדירות שיכוך הרעידות. לאחר מכן שיכוך הרעידות מוגבר בהדרגתיות עד לזיהוי שיכוך. תכנת הממשק הגרפי של סרווטרוניקס, ™ServoStudio, גם מאפשרת למשתמש לנטר ולהתאים בקלות את ההגדרות באופן ידני.
שיטת שיכוך הרעידות משפרת במידה ניכרת את הביצועים של מערכות סרוו שבהן נישא עומס על ידי חיבור גמיש, כמוצג בתמונה 4.
חיבור מסוג זה הוא בעל גמישות רבה. אם בקרת הסרוו של המנוע מוגדרת לשגיאת מיקום קרובה לאפס בזמן תנועה, העומס יתנודד בחוזקה בכל מיקום. בנוסף, כל שינוי בתאוצה יגרום לטלטול שיגביר את תנודות העומס אף יותר.
תמונות 5 ו-6 מציגים את זמני ההתייצבות שנרשמו לפני ואחרי יישום בקרת שיכוך הרעידות במערכת זו. ללא שיכוך רעידות זמן ההתייצבות עולה על שנייה וחצי; בעוד שעם שיכוך רעידות זמן ההתייצבות מתקצר לכמעט רבע שנייה.
בקרת שיכוך הרעידות הוכיחה עצמה כיעילה ביותר ביישומים רובוטיים שבהם עומסים כבדים גורמים לסטייה מהנתיב הנדרש. תמונה 7 מציגה את נתיב העקיבה הרובוטי לפני ואחרי יישום בקרת שיכוך רעידות במערכת המשתמשת בבקרי ה-CDHD. ללא הפונקציה הרעידות גורמות לסטייה מהנתיב המתוכנן. לאחר הפעלת הפונקציה העקיבה אחר הנתיב נעשית מדויקת וחלקה.
כאשר יישום מונע עושה שימוש בעומס תלוי, בבורגי הנעה כדוריים (ball screws), במחליקים ליניאריים מונחי רצועה
(belt-driven linear slides) או בחיבור גמיש של עומס למנוע, הוא מסתכן ברעידות. בקרי ה-CDHD בעלי בקרת שיכוך רעידות משפרים באופן משמעותי את זמן המחזור ואת הביצועים ביישומים כגון הרכבות אלקטרוניות, ייצור מוליכים למחצה, ייצור כלי מכונה ויישומי אוטומציה במעבדות.
-
- תמונה 1. ביישומים בעלי עומסים תלויים כגון רובוטי גנטרי, שיכוך הרעידות מבטל את הצורך במבנה מכאני מאסיבי
-

- תמונה 2. סדרת בקרי הסרוו CDHD של סרווטרוניקס בעלי בקרת שיכוך רעידות
-
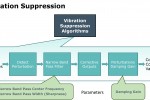
- תמונה 3. תהליך שיכוך הרעידות
-

- תמונה 4. הדגמת שיכוך רעידות
-

- תמונה 5. ללא שיכוך רעידות זמן ההתייצבות ארוך מאד
-

- תמונה 6. פונקציית שיכוך הרעידות מאפשרת לבקר ההינע לספוג את אנרגיית הרעידות ולקצר את זמן ההתייצבות במידה משמעותית
-
- תמונה 7. דיוק העקיבה אחר הנתיב משתפר במידה משמעותית עם השימוש בבקרת שיכוך רעידות
-

- תמונה 7. דיוק העקיבה אחר הנתיב משתפר במידה משמעותית עם השימוש בבקרת שיכוך רעידות
