



 מאת: Mr. Ila Pal, Ironwood Electronic, USA
מאת: Mr. Ila Pal, Ironwood Electronic, USA
תקציר
בעת בדיקה של מערכות משובצות עתירות ביצועים, חיונית לעיתים קרובות מדידה מדויקת של פרמטר AC או DC. במהלך שלב הפיתוח, המעגלים המשולבים אינם מחוברים דרך קבע ללוח היעד. במקום זאת הם מחוברים באמצעות תושבת ללוח היעד. אחד המגעים האופייניים הוא פרוב קפיצי (Stamp Spring Pin Socket). את הפרוב הקפיצי יש לדחוס לגובה נתון כדי ליצור חיבור חשמלי אמין. מאחר שהמעגלים המשולבים אינם מישוריים באופן מושלם, עלולים להיווצר בדחיסת הפרובים הקפיציים גבהים שונים, ואז נוצרות התנגדויות חשמליות שונות בנתיבי האות השונים [3]. שוני זה גורם לעיתים לכשל בהעברת האות, וכתוצאה מכך יש צורך לחזור על התהליך, ולהתקין מחדש את חיבור המעגל המשולב. מאמר זה מנתח תכונה חדשה שנוספה לפרוב הקפיצי, שמאפשרת דיוק של 2-3 אלפיות אוהם בהתנגדות החשמלית ללא תלות בגובה הדחיסה. תכונה משופרת זו מאפשרת למפתחי מערכות לבדוק ולאמת אותן ללא צורך בהפסקת התהליך. ההצגה תייחד מקום מיוחד להתנגדות החשמלית על פני מחזורים מרובים ולאופיינים עתירי ביצועים של המגע.
מבוא
עם הפונקציונליות הגדלה והולכת של מעגלים משולבים, גדל הצורך לבצע מדידות מדויקות ביותר של מתח חשמלי או לדייק ביותר במתחים החשמליים לצורך ביצוע בדיקות של פרמטרי DC וכן מדידות של אופייני AC. האופן היחיד שבו ניתן לבצע בדיקות אלו במדויק ולחזור על כך בסביבה הנבדקת במספר רב של החדרות (insertions), היא ליצור מגע עם ההתקן הנבדק באמצעות תושבת בעל התנגדות מגע שלא תשתנה ביותר מאשר מספר מיליאוהם. לדוגמה, פרמטר DC נפוץ בבדיקות הוא RDSON – ההתנגדות בין המוצא (source) והשפך (drain) כאשר פועל טרנזיסטור מסוג [1] FET. ערכו של פרמטר זה יכול להיות קטן כדי מספר מיליאוהם. לא ניתן מעשית למדוד פרמטר זה באמצעות פרובים קפיציים שערכי ההתנגדות שלהם נעים בין עשרות למאות מיליאוהם והם משתנים בעשרות מיליאוהמים מהחדרה להחדרה. לחלופין, חיבור קלווין (Kelvin) מסלק את הבעיה של התנגדות מגע באמצעות יצירת מגעי כוח וחישה נפרדים למשטח של התקן היעד. חיבור קלווין מצריך ששני פרובים קפיציים יבואו במגע עם משטח של התקן נתון. צורך זה מציב אתגרי היערכות מכניים נוספים. עם זאת, בדיקות AC כדוגמת תקשורת לפורטים או למודול חיצוני אחר תלויות בחיבוריות של הפרוב הקפיצי.
התנגדות המגע של פרוב קפיצי
כדי לקבוע את התנגדות המגע של פרוב קפיצי, עלינו להבין את המכניקה הפנימית של פרוב קפיצי, וכן את רשת ההתנגדויות שמאפשרת את מהלך הזרם המוצג באיור 1. פרובים קפיציים כפולי קצוות, מכילים בראש ובראשונה שתי בוכנות (תחתית ועליונה), מכל גלילי וקפיץ. הקפיץ (מיתר פסנתר מצופה זהב) נמצא בין שתי הבוכנות (עשויות מסגסוגת מוקשחת של נחושת ובריליום מצופה זהב) בתוך המכל (עשוי מאבץ זרחני מצופה בזהב) [2]. בעת הרכבתו, הבוכנה התחתית נדחסת לגובה ההפעלה. גובה זה מושפע משינויי גובה סטנדרטיים של משטח לוח המעגל המודפס. באופן דומה, בחלק העליון ההתקן דוחס את הבוכנה העליונה לגובה ההפעלה שלה וגובה זה ישתנה עקב חוסר המישוריות של ההתקן. במצב זה, קצות הבוכנות שבתוך המכל יגעו בדופן המכל והדבר יאפשר את זרימת הזרם דרך המכל הגלילי. מאחר שמישוריות ההתקן רחוקה ממושלמת, לא כל הפרובים הקפיציים דחוסים בדיוק לגובה ההפעלה של ההתקן. אם הבוכנות לא נדחסו לגובה ההפעלה המתאים, המגע עם דופן המכל ישתנה וכתוצאה מכך יחול שינוי של עשרות מיליאוהם בהתנגדות המגע.
באיור 1, 1R היא ההתנגדות במצב כיווץ בין קדמת ההתקן ובין קצה הבוכנה. 2R היא התנגדות במצב כיווץ בין הבוכנה העליונה והקיר הפנימי של המכל. 4R היא ההתנגדות במצב כיווץ בין הבוכנה התחתונה והקיר הפנימי של המכל. 5R היא ההתנגדות במצב כיווץ בין משטח המעגל המודפס ובין קצה הבוכנה.R3 היא ההתנגדות הכוללת של גופי הבוכנה העליונה, הבוכנה התחתונה והמכל. ההתנגדות הכוללת היא הסכום 5R1+R2+R3+R4+R. בנתיב זרם זה, R2 ו-R4 תורמות את רוב השוני בהתנגדות. כאשר הקפיץ הפנימי נדחס למרחק נתון, מופעל כוח על הבוכנות שנוגעות בדופן הפנימית. השוני במרחק הדחיסה גורם לשוני בכוח, ובסופו של דבר לשוני בהתנגדות.
תכנון חדש לפרוב קפיצי
האתגר הגדול ביותר הוא “להוציא מהמשחק” את השוני בהתנגדות המגע עקב שוני בגובה הדחיסה. התכנון שמוצג באיור 2 מסלק את אחת מההתנגדויות מרשת התנגדויות הכיווץ ומפקח על האחרת על ידי שימוש בקפיץ דחיסה חיצוני ובקפיץ עלה פנימי. בדגם החדש של הפרוב, הפרוב המוחתם, (stamp) לא קיים מכל גלילי, והזרם זורם מבוכנת פלדה מלאה עליונה לבוכנת פלדה מלאה תחתונה. הדגם החדש משתמש במנגנון אחיזת צבת (pinch) שמחליק במסלול מבוקר בחריץ שבין שתי בוכנות הפלדה המלאה. מנגנון צבת זה שומר על רצף בין הרכיבים הנעים בכל עת ובגבהי דחיסה שונים.
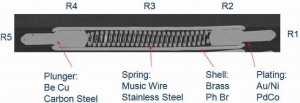
איור 1: המבנה הפנימי של פרוב קפיצי המראה את פרטי החומר ואת רשת ההתנגדויות

איור 2: המבנה הפנימי של פרוב מוחתם (Spring Pin Socket SBT- Stamp) המראה את פרטי החומר ואת רשת התתנגדויות
בפרוב המוחתם, R2, R4 של הפרוב הקפיצי כפול הקצוות מוחלפים בהתנגדות אחת R2. בנוסף, ערכי R2 מבוקרים באמצעות מנגנון הצבת. החיסרון של פרוב זה הוא שמנגנון הצבת נשחק לאחר חזרות מרובות של תנועה קדימה ואחורה בחריץ. אולם הגאומטריה של קצה הצבת ניתנת לאופטימיזציה עבור מספר מחזורים נתון, והפתרון טוב דיו לבדיקה ואימות של מוליכים למחצה במעגלים משולבים.
המערך הניסיוני
על מנת לאמת את השיפור בביצועים של הפרוב המוחתם החדש לעומת הפרוב הקפיצי הקיים, ערכנו כמה ניסויים שהשוו את הפרובים זה לצד זה בניסוי זהה. הפרוב הקפיצי מכונה SS, והפרוב המוחתם החדש מכונה (Stamp Spring Pin Socket).
כוח-סטייה-התנגדות
הניסוי הראשון בוחן את היחס בין הסטייה, הכוח והתנגדות המגע של הפרוב הקפיצי. נעשה שימוש בעמדת בדיקה של הזזה-כוח (DF) (Displacement – Force) כדי למדוד את הסטייה של הפרוב הקפיצי והכוח המתאים לה. 36 פרובים קפיציים הורכבו במערך בדיקה (test fixture). מערך הבדיקה הורכב באמצעות פינים על לוח שחובר למבדק (tester) לצורך מדידות התנגדות מגע. מסלול האות החשמלי החוזר חובר לבוכנה של מד הכוח. הבדיקה החלה בהזזת הבוכנה של מד הכוח לקצה של הפרוב הקפיצי. לאחר מכן, הזזנו את הבוכנה של מד הכוח בצעדים של 0.01 מ”מ ורשמנו את הכוח והתנגדות המגע המתאימים. הבדיקה חזרה על עצמה לכל 36 הפרובים הקפיציים. הניסוי כולו בוצע שוב עבור דגם הפרוב המוחתם החדש. חושבו ממוצעים וסטיות תקן. איור 3 מראה את עקומת הכוח לעומת הסטייה עבור פינים SS כוח ממוצע – כחול, כוח ממוצע ועוד שתי סטיות תקן – אדום ו- SBT (כוח ממוצע – ירוק, כוח ממוצע ושתי סטיות תקן – סגול). מהגרף נראה כי הכוח גדל עם הגידול בהזזה.
במקרה של פין SS, עקומת הכוח הממוצע ועוד שתי סטיות תקן נמצאה חלקה, דבר המשקף את מהירות הקפיץ הפנימי. במקרה של פין SBT, עקומת הכוח הממוצע ועוד שתי סטיות תקן הראתה שינויים גדולים. דבר זה קרה עקב שילוב של קפיץ דחיסה חיצוני וקפיץ עלה פנימי. הדבר גם מביא לעקומת כוח ממוצע שטוחה מאחר שהקפיץ האחד מפצה על השני. תכונה זו חשובה מאד לשקע. כאשר ההתקן נלחץ על הפינים, אנחנו עוסקים בכוח הממוצע הכולל, בניגוד לכוח יחיד. מאחר שעקומת הכוח הממוצע לעומת ההטיה שטוחה, אנו משיגים אופן פעולה חלק מאד למשתמש.
התנגדות המגע מתנהגת הפוך מהכוח, היא יורדת עם עליית הסטייה כפי שרואים באיור 4. עבור פין ה-SS, עקומת ההתנגדות הממוצעת ועוד שתי סטיות תקן משתנה בצורה דרסטית. הדבר גורם לבעיות גדולות ביישומים. מאחר שלוחות המעגלים המשולבים אינם מישוריים באופן מושלם, עלולים להיווצר בדחיסת הפרובים הקפיציים גבהים שונים, ואז נוצרות התנגדויות חשמליות שונות לנתיבי האות השונים. שוני זה גורם לעיתים לכשל בהעברת האות, וכתוצאה מכך יש צורך לחזור על התהליך ולהתקין מחדש את המעגל המשולב. במקרה של פין SBT, עקומת ההתנגדות הממוצעת ועוד שתי סטיות תקן הייתה חלקה ונצפו שינויים בגודל של מיליאוהם בודדים ביחס לעקומת הממוצע, ובאופן עקבי במהלך הסטייה. בכל יישום נבחר תחום רצוי של ההזזות, בהתבסס על דרישות עמידה בתקנים שהוגדרו לכל יישום. לדוגמה, תחום ההזזות הרצוי הוא 0.2 מ”מ עד 0.3 מ”מ. התנגדות המגע הממוצעת המתאימה להזזה זו היא 20 מיליאוהם אם משתמשים בפין SBT, והיא 30 מיליאוהם עד 50 מיליאוהם כאשר משתמשים בפין SS. מידע זה חשוב ביותר למהנדס הבדיקות מאחר שסדרה מסוימת של בדיקות עלולה להיכשל עקב תנודה זו. מאחר שפין SBT הוא בעל התנגדות עקבית, הוא מסייע להימנע מכשלי שווא ומחזרה על בדיקות עקב צורך לחבר מחדש את ההתקנים פעמים רבות. גורם חשוב אחר שיש להתחשב בו הוא שפין SBT מספק התנגדות מגע נמוכה עקבית וכוח חלש. המשמעות היא שהכוח הכולל המופעל על ההתקן הינו חלש, דבר הכרחי במעגלים המשולבים החדשים שמצעם דק ביותר לצורך מענה על הדרישות של התעשיות הצרכניות.
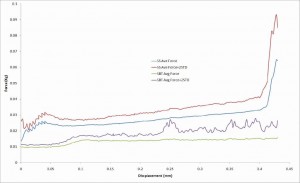
איור 3: עקומות כוח לעומת סטייה עבור פין SS ופין SBT
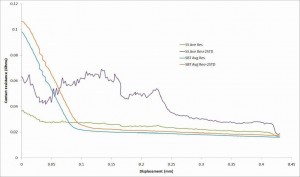
איור 4: עקומות התנגדות המגע לעומת סטייה עבור פין SS ופין SBT
בדיקת מחזור חיים
הניסוי הקודם הוכיח קיום עקביות בבדיקה של מחזור בודד. במציאות, הפרובים הקפיציים פועלים על פני אלפים רבים של מחזורים במהלך זמן החיים שלהם. הבדיקה השנייה בוחנת את היחס בין התנגדויות המגע על פני מחזורי חיים רבים של הפרוב הקפיצי. לצורך הניסוי השתמשנו במטפל (handler) ממשי. 500 פינים הורכבו על מתקן בדיקה שהורכב על לוח הבדיקה המחובר למבדק. מדמה התקן מצופה זהב שקוצר הורכב על ראש הבוכנה. מערך הבדיקה כוונן כך שהראש נע 0.3 מ”מ כלפי מטה, מרחק השווה לאורך התנועה שנבחר עבור הפרוב הקפיצי. נתוני התנגדות המגע ההתחלתית נמדדו באמצעות מבדק והופעל ציוד הבדיקה האוטומטי ATE . הציוד מניע את הבוכנה קדימה ואחורה וכתוצאה מכך פועל הפרוב הקפיצי במספר רב של מחזורים. מונה דיגיטלי הוכנס למערך הבדיקה כדי למנות את המחזורים. נתוני התנגדות המגע של פיני ה-SS נאספו לאחר מרווחים שונים של מחזורים ועובדו לממוצע וסטיית תקן. הבדיקה בוצעה שוב עבור פיני SBT והנתונים נאספו ומוצגים בגרף שבאיור 5.
ניתן לראות מהגרף שהתנגדות המגע הממוצעת של פין SBT נמוכה מ-15 מיליאוהם באופן עקבי במהלך 300,000 מחזורים. מוצגת גם סטיית התקן כדי ללמוד על פיזור הנתונים. סטיית התקן עבור פין SBT נמוכה מ-3 מיליאוהם במהלך כל מחזורי החיים. לעומת זאת, התנגדות המגע הממוצעת עבור פין SS נעה בין 40 מיליאוהם ל- 80 מיליאוהם עם עליית מספר מחזורי החיים. סטיית התקן עבור פין SS נעה בין 5 מיליאוהם ל- 15 מיליאוהם. ניתן להסיק מצפייה בגרף שדגם פין SBT מאפשר התנגדות מגע עקבית במהלך מחזורי החיים, וזו מאפשרת עקביות ביישומים הסופיים של בדיקות התקנים.
ניתן לראות בברור שפינים של SBT הם בעלי כושר נשיאת זרם גבוה יותר מפינים של SS ועליית הטמפרטורה שלהם מינימלית בהשוואה ל-SS. יתרון זה של פין SBT נובע מהגיאומטריה שלו, שבה שני הרכיבים נושאי הזרם הם גופים מלאים ששטח החתך שלהם מלבני, בעוד שבפין SS, הגוף העיקרי הוא מיכל גלילי ששטח הפנים שלו קטן יותר. לתכונה זו יש השפעה ישירה על עצמת הזרם שהוא יכול לשאת מבלי שהטמפרטורה תחרוג מתחום הפעולה שלו.
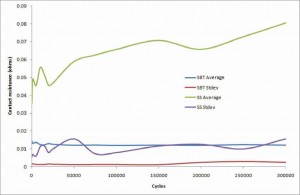
איור 5: עקומות התנגדות לעומת מספר מחזורי חיים עבור פין SS ופין SBT (פין SS: ממוצע בירוק, סטיית תקן בסגול, פיןSBT : ממוצע בכחול, סטיית תקן באדום).
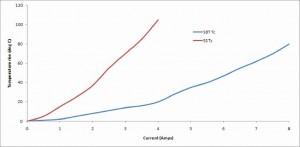
איור 6: עליית הטמפרטורה לעומת כושר נשיאת הזרם עבור פין SS (אדום) ופין SBT (כחול).
אפיון במהירויות גבוהות
הבדיקה הבאה קובעת איזה מגען (contactor) יכול לטפל במהירות גבוהה של אות ללא הפסדים. הפינים הקפיציים עם המתקן הורכבו על לוח מותאם שמתוכנן לטפילות נמוכה ומאפשר שימוש בפרובים שמוצבים במישור משותף (עבור פרובים סמוכים). שבב בחן עם תבנית בדיקה סטנדרטית הורכב מעל המתקן. מערך זה מאפשר למדוד פינים בשלושה מצבים (open, shorted ו-thru). נעשה שימוש בתוכנת (Microwave Design System) של Hewlett-Packard כדי ליצור מודל מעגל אקוויוולנטי (איור 7), תואם סימולטור SPICE.
כל המדידות בוצעו באמצעות מערכת מדידה בתדר גבוה (נתח רשת Hewlett-Packar 8510C ו- GGB Pico-probeTM 450 mm pitch). נתח רשתHP 8510C הוא מכשיר הפועל בתחומי תדר נתונים. הערכים שנמדדו הוגדרו כפרמטרי פיזור (פרמטרי a.k.a. s). למכשיר HP8510C יכולת כיול מצוינת, והוא המכשיר המדויק ביותר בתדר גבוה הזמין כיום [4] .
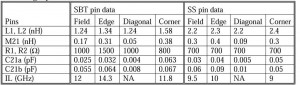
טבלה 1: אופייני מהירות גבוהה
L1, L2 ההשראות העצמית של פין
M21: השראות הדדית בין פינים סמוכים
R1, R2: התנגדות מצד (shunt) של הסלילים 1L ו-2L, שמשמשים למדל הפסדים בתדר גבוה עקב אפקט הקרום (skin effect) והפסדי החומר הדיאלקטרי
C21a: קיבול הדדי בין פינים סמוכים על המעגל המודפס
C21b: קיבול הדדי בין פינים סמוכים על צד ההתקן
IL: הפסדי החדרה
בעבודה זו. השתמשנו בכיול (load-reflect-match). פרוב-פיקו GGB מספק נתיב איכותי של 50 אוהם היוצא מנתח הרשת והכבלים אל ההתקן הנבדק. חזרנו על הניסוי עם פין SBT והתוצאות מוצגות בטבלה 1. רוחב הפס עבור המחבר נקבע ממדידת loop-thru בשני פינים צמודים. שורת הפינים הקרובה ביותר חוברה להארקה. רוחב הפס להפסד החדרה של 1dB גדול מ-12GHz לפין SBT. בפין SS, רוחב הפס להפסד החדרה של 1dB הוא 9GHz ערכי ההשראות העצמית 1L ו-2L עבור ה-SBT נעו בתחום של 1.24nH עד 1.58nH. לפין SS, ערכי ההשראות העצמית היו בתחום של 2.2nH עד 2.4nH. למרות האורכים הזהים של הפינים מסוג SS ו-SBT, רוחב הפס עבור פין SBT היה גדול יותר וערכי ההשראות נמוכים יותר עקב היותו גוף מלא ששטח החתך שלו מלבני. לשני סוגי הפינים, SS ו-SBT, התקבלו ערכי השראות הדדית בין פינים סמוכים וערכי קיבול דומים. לפין SBT תוצאות עדיפות מפין SS בבדיקה במהירות גבוהה.
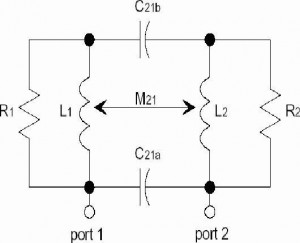
איור 7:מודל מעגל אקוויוולנטי
סיכום ומסקנות
כל משתמש בהתקנים בצפיפות גבוהה מייחס חשיבות מרבית לשמירה על עלויות פיתוח מבוקרות, לאופטימיזציה של יכולות הייצור הקיימות ולמזעור הזמן מרעיון למדף (time-to-market). הרעיון המרכזי הוא להסתמך על נתוני בדיקות ולא לבזבז זמן בבדיקות חוזרות ולהימנע מכשלי שווא. הבדיקה שבוצעה למעלה עונה על מספר רב של צרכים של יישומי מהירות גבוהה וצפיפות גבוהה. תוצאות הבדיקה מאפשרות להשוות את האופיינים החשמליים והמכניים של שני סוגי המחברים.
פרוב מוחתם מספק התנגדות מגע טובה יותר מאשר פרוב קפיצי.
השינויים של התנגדות המגע עבור פרוב מוחתם נמוכים מ- 3 מיליאוהם.
לפרוב מוחתם כושר נשיאת זרם טוב יותר עקב החתך המלא והמלבני שלו שבו עובר מסלול הזרימה של הזרם החשמלי.
פרוב מוחתם מציג רוחב פס טוב יותר עבור העברת אותות במהירות גבוהה מאשר פרוב קפיצי.
הגאומטריה המשופרת של הפרוב המוחתם מבטלת את הצורך במכל גלילי ובהתנגדות כיווץ אחת ברשת. מנגנון אחיזת הצבת שבין שתי בוכנות הפלדה המלאה של הפרוב המוחתם שומר על הרצף בין הרכיבים הנעים בכל עת ובגבהי דחיסה שונים. תכונה זו מאפשרת לקבל נתוני בדיקה אמינים ומבטלת את הצורך בבדיקות חוזרות. ככל שהזמן מרעיון למדף יתקצר, הגופים המובילים בתעשייה יאמצו טכנולוגיה זו – כשלב נוסף בהתפתחות (או במהפכה) של רמות הביצוע של מחברים.
מקורות
1. Harper, C.A., Electronics Packaging and Interconnection Handbook, second edition, McGraw-Hill, 1997
2. Pal, I., “Evaluating Technologies for Testing High Speed High Density Ball Grid Array Packages,” Pan Pacific Microelectronics Symposium, 2004.
3. Mroczkowski, R. S., and Maynard, J. M., “Estimating the Reliability of Electrical Connectors,” IEEE Trans. on Reliability, 1991.
4. Otonari, G., “Giga Test Labs – Spring Probe Interconnector Test Report,” May, 2006.
5. Hart, B. L., “Digital Signal Transmission Line Circuit Technology,” Van Nostrand Reinhold, New York, 1988.
6. Johnson, H. W., Graham, M., “High-Speed Digital Design: A Handbook of Black Magic,” Prentice Hall PTR, 1993.
Author: Mr. Ila Pal is VP of Marketing at Ironwood Electronic, USA. He holds a MS degree in Mechanical Engineering from Iowa State University, Ames, USA. He holds a MBA degree from University of St. Thomas, Minneapolis, USA. He has six patents relating to high performance BGA socket design. He has presented many papers related to interconnection technology and published articles in reputed journals. He has spent more than 15 years developing new technologies in the Packagingand Interconnection field.
הכתבה נמסרה באדיבות
חברת מגוון טכנולוגיות והנדסה