




לאור השינויים הרבים המתחוללים בתחום הלוחמה המודרנית, נדרשים שינויים גם בחידושים הטכניים המוצעים על ידי שותפים טכנולוגיים בתחום הביטחון העולמי. שינוי פניה של המערכה הצבאית, עם הפחתת היקף הכוחות על הקרקע, שימוש רב יותר במודיעין הנאסף באמצעות כלי רכב אוטונומיים, העברת נתונים בזמן אמת למשימות והתפתחות של לוחמה מבוססת רשת – כל אלה מניעים את הפתרונות והיישומים הדרושים כדי לתמוך טוב יותר בלוחמים של ימינו.
בלב העניין, הפעילות בשדה הקרב כיום תלויה במידה רבה בגישה לנתונים וביכולת לחלוק נתונים מורכבים בזמן אמת עם המפקדים בשטח, כדי שהם בתורם יוכלו להעביר את המידע הדרוש כל הדרך עד ללוחם בקו הקדמי. כאשר הלוחמה הולכת ומשתנה ומשלבת בהדרגה סוגים נוספים של כלי רכב אוטונומיים, לרבות כלי הרכב המתוארים במפת הדרכים למערכות קרקע לא מאוישות1, אשר פותחה על ידי משרד הפרויקטים המשותפים לפיתוח מערכות רובוטיות של צבא ארצות הברית (RS JPO), ולאור הצורך להפחית עוד את ה-SWaP (גודל, משקל וצריכת הספק), מטרה הממומשת באופן היעיל ביותר על ידי טביעת רגל מבוססת תקנים – ולספק מחשוב משובץ עתיר ביצועים (HPEC) עם קלט/פלט חיישנים גמיש, יהיה צורך שוב בקפיצה משמעותית בחידושים ההנדסיים.
הצורך בתמיכה בדרישות המחשוב הנייד היבשתי האוטונומי מבחינת פונקציות ההפעלה של כלי הרכב, כמו למשל ראייה, תקשורת וניווט אוטונומי, במקביל לצורך לתמוך בפונקציות מטען ייעודי, כמו למשל קלט חיישנים מותאם אישית או ניהול נשקים, כל אלה יטילו עומס כבד על הדור הנוכחי של מוצרי HPEC מוקשחים. האם התשובה תהיה פתרונות קנייניים בהתאמה אישית, תמהיל של מעבדים ייעודיים קטנים יותר או אולי פיתוח תקנים שיעמדו בצרכים של כלי רכב אוטונומיים עתידיים? התשובה האופטימית היא שפיתוח תקנים טכנולוגיים, מערכות מסחריות מהמדף (COTS) וחידושים הנדסיים יביאו אותנו לעידן של אוטונומית כלי רכב בכל סוגי הפעילויות הצבאיות.
משרד הפרויקטים המשותפים למערכות רובוטיות (RS JPO) בעולם האמיתי מניע את מפת הדרכים
הכרב"מים כיום מופעלים מרחוק, או על ידי נהג אנושי מרחוק או מופעלים באופן אוטונומי למחצה. בשלב הפיתוח הנוכחי של הכרב"מים, יש להם מגוון יכולות להפעלה אוטונומית. לדוגמה, כרב"ם יכול להיות מוגדר כעבד (Slave) של רכב אחר המופעל על ידי אדם בתוך שיירה, או לעקוב אחר משוואת מעקב או נקודות נתיב גיאוגרפיות בהשתמש בחיישנים המותקנים ברכב, GPS ועוצמת חישוב המנחים את ההתקדמות. ל-HPEC יכול להיות תפקיד חשוב בפיתוח יכולות אוטונומיות, במהלך ההתקדמות אל עבר עצמאות מלאה. בנוסף, הצרכים של מטענים ייעודיים, כמו למשל התקנים לגילוי חומרי נפץ מאולתרים (IED), יהפכו למתוחכמים אף יותר. הפעלה אוטונומית תצריך מודעות מצבית אשר תוכל לקבל מענה באמצעות מערכות המחשוב של המטען הייעודי כאשר הכרב"מים יהפכו לאוטונומיים באופן מלא.
כדי לתמוך בהתקדמות אל עבר אוטונומיה מלאה, פיתח ה-JPO של צבא ארה"ב תוכנית פונקציונלית למגוון סוגים של כרב"מים, כולל מספר סוגים של כלי רכב ופלטפורמות לכלי רכב יבשתיים לא מאויישים. באופן ספציפי ניתן לקבוע כי לכלי הרכב בעלי הניידות העצמית ורכבים משוריינים תהיה ההשפעה הרבה ביותר על פיתוח ה-HPEC.
מפת הדרכים למערכות יבשתיות לא מאוישות אשר פותחה על ידי RS JPO מבוססת על מאפשרים טכנולוגיים עיקריים אשר יאפשרו צמיחה של הכרב"מים עם הזמן. כמה מהמאפשרים הללו יזדקקו ל-HPEC מהפכני ייחודי, במיוחד ביישומים בתחומים של ניווט אוטונומי, כוח, ראייה, ארכיטקטורה ותמיכה במטענים ייעודיים. כדי לתמוך במפת הדרכים הזו, פתרונות HPEC יצריכו במהרה שדרוגי ביצועים מעבר לאלו הקיימים כיום. בכרב"מים מהסוג בעל יכולת הניידות העצמית ובכרב"מים משוריינים קיימות תוכניות ספציפיות עם סטים ייחודיים של יכולות המצריכות מאפשרים טכנולוגיים מתאימים כדי לממש את מפת הדרכים. התוכניות הללו כוללות בין השאר:
Project Workhorse: תוכנית כרב"מים המיושמת באפגניסטן הכוללת פלטפורמת שירותים בעלת יכולת ניידות עצמית בצורת SMSS של לוקהיד מרטין, במימון הצבא. ה-SMSS הוא רכב יבשתי אוטונומי שיכול לשאת עד חצי טון ציוד לחימה, וניתן להפעילו מרחוק באמצעות לווין כדי לבצע פעולות אוטונומיות כמו למשל "עקוב אחרי", "לך לנקודה" ופעולת "Retro-reverse". חבילת החיישנים ב-SMSS משלבת גילוי אור וקביעת טווחים (LIDAR), מצלמה צבעונית ואינפרא אדומה. הרכב יכול להינעל על ולעקוב אחר כל אדם על ידי זיהוי הפרופיל התלת ממדי שלו הנקלט על ידי החיישנים ברכב. ה-SMSS יכול לנווט באופן אוטונומי לאורך נתיב מתוכנת מראש בהשתמש בנקודות כיוון המתקבלות ממערכת GPS. הפיתוח של סוג זה של כרב"ם יצריך שיפורים בצריכת כוח המחשוב ברכב ושילוב חיישנים משופר ונרחב יותר, לצד יכולת חישוב זהה או טובה יותר, והפחתת חתימת הפליטות הניתנות לגילוי (ראה תרשים 1).
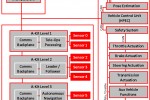
Convoy Active Safety Technology – לגילוי/השמדת מטעני צד בתנועה של שיירות רכב: מערכת AMAS בצורת תוסף או ערכת השבחה למשוריינים המתאימה כמעט לכל כלי רכב מאויש קיים, המאפשרת מגוון רחב של התנהגויות אוטונומיות. היכולות נעות בין הפעלה מרחוק ועד סיוע לנהג בנהיגה וניווט אוטונומיים לחלוטין. ה-AMAS תיוצר בהשתמש בארכיטקטורה פתוחה ותסופק בצורת מספר ערכות: "ערכה A", שהיא המוח האוניברסלי; "ערכה B" הכוללת חיישנים ספציפיים לרכב, איסוף ומחברים; וערכה C, המיועדת לניהול המטענים. עם ה-AMAS, המשמעות של עיבוד נוסף היא יכולת אוטונומית רבה יותר; כדי לעמוד בדרישות הצפויות, יהיה צורך לספק את הערכות הללו עם טביעת רגל סטנדרטית קטנה יותר, ובהשתמש בחיבורים מתוקננים, כדי להפחית את עלויות המערכת.
אחד הצרכים המשותפים לכל התוכניות הוא הפונקציה של פעולה אוטונומית ותמיכה במטענים ייעודיים. עבור טכנולוגית AMAS 3, פעולה אוטונומית מתקבלת באמצעות שילוב של מספר חיישנים, עיבוד על גבי כלי הרכב, פונקצית בקרה אלחוטית (drive-by-wire) ובקרת מטענים נוספים.
בעוד שהתוכניות הללו נמצאות כיום בשלבי פיתוח, מפת הדרכים הטכנולוגית של RS JPO מצריכה יכולות משופרות עבור הגרסאות העתידיות של התוכניות הללו, כדי לתמוך בדברים הבאים:
שילוב של מצלמות אינפרא אדומות עם הפרדה גבוהה יותר, שיפור תמונה טוב יותר על גבי כלי הרכב עבור מצלמות בספקטרום הנראה, שילוב עתידי של נתונים נראים ונתוני IR בזמן אמת, קלט נוסף מחיישנים/מצלמות כדי לתמוך ברוחב פס רחב יותר.
תמיכה באלגוריתם לגילוי עצמים והימנעות מעצמים, גילוי ומעקב חכם אחר עצמים, עיבוד והדמיה סטריאוגרפית (כדי להגיע בסופו של דבר לזיהוי עצמים).
תמיכה בחישובי HPEC עבור הגורמים הנ"ל, במקביל לשילוב מטענים מרובי חיישנים כמו למשל גילוי IED, ניהול נשקים, מניפולטורים והעברת אותות בין חיישנים.
ארכיטקטורה עתידית משותפת מבוססת תקנים לחישובי כרב"מים (על פי ה-RS JPO והיוזמה ליכולת הפעלה הדדית – כרגע בשלב IOP v.0).
כדי שכרב"מים ישיגו פעולה אוטונומית משופרת, מפת הדרכים הטכנולוגית מצריכה התקדמות ביכולות החיישנים מבחינת מהירות הקלט, איסוף נתונים ממספר חיישנים, עיבוד נתונים בזמן אמת והעברת התוצאות למערכות המשנה של הבקר. לאור הדרישות מהחיישנים והתמיכה הספציפית במטענים, כמו למשל מכ"ם עם מבט צד לגילוי IED, קיים צורך רב בפתרון אחד ל-HPEC . בנוסף, הדחיפה לתקנים פתוחים בארכיטקטורת המוצר תביא לאימוץ פתרונות פחות קנייניים של חומרה פיזית, תוכנה וקישוריות, ובכך תיווצר הזדמנות לאפשרויות מהפכניות, תחרותיות יותר, עם יכולת החלפה הדדית.
טכנולוגיות הדמייה ומטענים מניעות את הדרישות ל-HPEC בכרב"מים
דרישות החישוב בכרב"מים מונעות על ידי ההדמייה המשמשת כדי לתמוך בראיית מכונה, עם מטענים מורכבים לגילוי IED. יש תוכניות מסוימות של כרב"מים צבאיים הזקוקות ליכולת לבצע ניווט אוטונומי במהלך שעות היום וכן בשעות הלילה. הן זקוקות ליכולת לנווט במצב התגנבות (ללא פליטה של אנרגית חיישן הקליטה). בהשתמש בזוג מצלמות אינפרא אדומות תרמיות (TIR), אפשר לבצע Stereo Ranging וניתוח של השטח כדי ליצור מפה מוערת של השטח. TIR היא אופציה נוחה, מאחר ומצלמת TIR אחת כבר נכללת בחבילת החיישנים של כלי רכב רבים. HPEC מותקן כדי לנתח את נתוני התמונות התרמיות וכדי לבצע מיפוי של השטח2.
לצורך פיתוח פעולה אוטונומית המסתמכת על TIR כפי שמוצע בכרב"מים, יהיה צורך לשפר את עיבוד התמונה, שהוא חלק קריטי עבור פונקציות בקרה כמו ניווט אוטונומי, במקביל להתגברות זרמי הנתונים מהחיישנים. כדי להגיע לראיית מכונה יעילה, השילוב של מצלמה וחיישנים יכלול ככל הנראה יכולות של מצלמה אינפרא אדומה, מצלמה צבעונית ו-LIDAR בצריח אחד3. כל אחת מהמצלמות הללו תפעל בקצב של 15-60 תמונות בשנייה, כאשר כיום הן יכולות לייצר 516Mbit/second נתוני תמונה לא דחוסים לכל מצלמה, נתון אשר יגדל ל-1.3GBit/second ולבסוף ל-3.48Gbit/second. נתוני המצלמה יכולים להיות לא דחוסים במקור, כדי שלא להפחית את רמת עיבוד התמונה שניתן להפיק מה-HPEC בהשתמש בתקן אותות וידיאו RS-170 או RS-422. כאשר קצב הנתונים יעלה, CameraLink, GigEVIsion או CoaXpress יחליפו את הממשקים הנ"ל.
מפת הדרכים של RS JPO מצריכה אלגוריתמים חדשים להימנעות מהתנגשות וממכשולים, המסתמכים במידה רבה על חישובים רקורסיביים המתבצעים באופן מיטבי עם GP-GPUs או FPGAs מומחים. לדוגמה, מחקר שנעשה באחרונה לעיבוד תמונות בכטב"ם בהשתמש באלגוריתמים המבוססים על GP-GPU הראה עלייה של 99.5% בביצועים לעומת שימוש באותו אלגוריתם ב-CPU של אינטל. בכל המקרים, GP-GPU סיפק תוצאות תוך פחות מ-50msec4. בהינתן תרחיש רכב אוטונומי מלא בו המפעיל האנושי אינו מעורב, כשההחלטות לגבי הפעלת הרכב חייבות להתקבל בזמן אמת במהירות, חיוני לצייד את ה-HPEC ביכולת GP-GPU שיכולה לתקשר עם כל הקלטים ולבצע את המשימה בהצלחה. לפיכך השימוש בסוגים רבים של מצלמות עם הפרדה גבוהה יותר הפועלות ברזולוציה גבוהה יותר, ועם רוחב פס גבוה יותר יניע את התכן של מערכות חישוב HPEC מוקשחות התומכות בכרב"מים העתידיים.
מערכת מטענים מלאה לטיפול בחומרי נפץ מצריכה רכיב גילוי IED, רכיב להערכת IED ורכיב לסיכול IED. עיבוד המטענים צריך להתבצע בזמן אמת כדי להשיג את רמת הבטיחות הדרושה עבור הכרב"ם והמשימה שלו. כמו בניווט אוטונומי וראיית מכונה, גילוי בזמן אמת של השינויים בנתונים המגיעים מרכיבי הגלאי יצריך מידה רבה של עיבוד GP-GPU או FPGA.
כיום משתמשים בגישת הפרד ומשול כדי להפריד בין בקרת הרכב, החיישנים ועיבוד המטענים. הפרדת הפונקציות לערכות כפי שמתואר בטכנולוגית AMAS (ראה תרשים 2) היא גישה טובה כדי לאפשר צמיחה עתידית של HPEC בכרב"מים. לדוגמה, רכב אוטונומי מלא עם מטען של מכ"ם חודר קרקע לא יכול לבצע את כל משימות העיבוד המוטלות עליו עם פתרון HPEC יחיד. על ידי חלוקת הבעיה לצומתי חישוב ופונקציה, ניתן להגיע לפתרון ארוך טווח ניתן להרחבה. קביעת תקנים לפתרונות כרב"מים המתקננים את גודל הקופסה הפיזי של HPEC ואת סוגי המחברים וה-I/O הנתמכים, תאפשר יכולת החלפה הדדית והתפתחות ככל שפתרונות ה-HPEC יגדלו וישתנו.
התפתחות תקנים טכנולוגיים, מערכות מסחריות מהמדף (COTS) וחידושים הנדסיים
לאפשר רמות שונות של אוטונומיה
הדרישות המתפתחות של כרב"מים מצריכות מהירות עיבוד גולמי ואלגוריתמי ביצוע רקורביסיביים במיוחד, היוצרים את הצורך בפתרונות HPEC המשלבים עיבוד עם CPU של אינטל ומערכות מסחריות מהמדף ו-GP-GPU בפתרון אחד.
כפי שצוין לעיל, RS JPO מקדם את השימוש בתקנים בתהליך הפיתוח של פתרונות כרב"מים, וה-VPX בגודל 3U ו-6U הקיימים כיום בשוק מספקים פתרונות HPEC מוקשחים. התקנים המפותחים בפתרונות HPEC עם טביעת רגל קטנה יותר כוללים את תקן הטכנולוגיות VITA הידוע בשם VITA 75. VITA 75 נוקט בגישה שונה באופן מהותי מכל שאר התקנים עם מקדם הצורה הקטן, בכך שהוא מתמקד בקופסה הפיזית, במידות מארז סטנדרטיות, מחברים ופיני I/O, במקום לפרט את מודולי המחשב השונים המותקנים בפנים.
הפרופילים של מערכת המשנה VITA 75 כוללים עד ארבעה תת-פרופילים נפרדים:
רכיב VITA 75.0 של פרופיל מערכת המשנה (פרופיל בסיס)
רכיב VITA 75.11 של פרופיל מערכת המשנה (פרופיל הלוח הקדמי)
VITA 75.2x – קירור והרכבה, המורכב ממפרט Vita 85.2x dot ולאחריו שם הפרופיל המוגדר על ידי VITA 85.2x.
פתרונות VITA 75 מותאמים במיוחד לספק מענה לדרישות HPEX בכרב"מים, מאחר והם מספקים למתכננים מערכת של טביעות רגל מתוקננות שהן באופן כללי קטנות יותר מאשר פתרונות OpenVPX בגודל 3U או 6U עם ציוד זהה, ובמקביל מציעים גם סכימת מחברים סטנדרטית המאפשרת החלפה הדדית בין מערכות המשנה ברמת הרכב, ומאפשרים התפתחות של מערכת המשנה של הרכב באופן ניתן לחיזוי. המערכת HPERC של ADLINK (מחשב מוקשח במיוחד ועתיר ביצועים) היא אופיינית לסוג כזה של פתרון VITA 75 (ראה איור 3). מערכת HPERC מספקת בסיס איתן של עיבוד i7 של אינטל בשילוב הידוק עם NVIDIA משובץ או ATI GP-GPU, וכן תמיכה רבה ב-I/O ואפיק נתוני מצלמה ורכב. פתרון זה יכול לספק באופן מיידי את עיבוד התמונה הדרוש ואת ה-I/O הדרושים ליישומי כרב"ם הן היום והן בעתיד.
סיכום
הכרב"מים (UGVs) מהווים מכפיל כוח לכוחות יבשתיים. האתגרים של פעולה אוטונומית אמיתית ותמיכה נאותה במטענים קובעים כיוון ברור ל-HPEC. אם מפת הדרכים המאתגרת שנקבעה עבור הכרב"מים תמומש, יהיה צורך לפתח ולממש ארכיטקטורת HPEC משותפת מבוססת תקנים. ADLINK, לצד ספקים אחרים של פלטפורמות משובצות, עוסקת ללא לאות בהגדרה ובפיתוח כנגד תקנים בתעשייה כדי לעמוד בדרישות ה-SWaP של מערכות HPEC בעתיד, במטרה לעמוד בדרישות התובעניות של כרב"מים ולפתח תוכניות אחרות אשר יועילו ויעצימו את כוח הלחימה.
סימוכין:
1) מערכות רובוטיות – מפת הדרכים של הפרויקט המשותף – 2011 ונספח 2012. המערכות היבשתיות הלא מאוישות שנדונו כוללות את CAST/AMAS, Packbot 500 Fastac, SUGV XM-1216 w/Tether, SUGV 310 (Mini-EOD), TALON III B, TALONG IV, ו- Packbot 510.
2) א. רנקין – תפיסה של כלי רכב יבשתיים לא מאוישים בהשתמש במצלמות אינפרא אדומות תרמיות – 2011.
3) ג. קוגוט – היתוך חיישנים להשגת התנהגות אינטליגנטית בכלי רכב יבשתיים לא מאוישים קטנים – 2007.
4) ב. א. שיתה – ניווט מבוסס ראייה (VBN) בכלי טיס לא מאוישים 2012.


-

- תרשים 1
-
- תרשים 2
